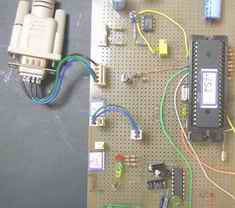
���@RS�Q�R�QC�ʐM�@�i�@PC�@�|�@PIC�ԁ@�j �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@  �@�@
�@�@
�@�@���@PC��COM�|�[�g
�@�@�@�@�ŋ߁i2007/3���_�s��)��PC�Ɏ��t�����Ă���RS�Q�R�QC������COM�|�[�g�͂����ނˈȉ��̂悤�ȏ�����
�@�@�@�Ȃ��Ă��܂��B
�@�@�@�@�@�E�@�ʐM�����@�@�@�@�c�c�@�@���������ʐM����
�@�@�@�@�@�E�@�o�����ʐM �@�@�c�c�@�@�S��d or ����d
�@�@�@�@�@�E�@�t���[����@�@�@�c�c�@�@�n�[�h�E�F�A or �\�t�g�E�F�A or �Ȃ�
�@�@�@�@�@�E�@�ő�`�����x(��)�@�c�c�@�@200Kbps�ȏ�
�@�@�@�@�@�E�@UART��FIFO ���M�A��M�o�b�t�@�[�e�ʁ@�c�c�@�e�X�@�U�S�o�C�g�ȏ�@
�@�@�@�@�@�E �h���C�o�o�͓d���@�@�@�@ �c�c�@�}�T�@�`�@�}�P�TV
�@�@�@�@�@�E�@���V�[�o�[�@�X���b�V���z�[���h�d�� �@�c�c�@�}�RV�@
�@�@�@�@�@�E�@�_���@�h�O�h�i�X�y�[�X�j�@�c�c�@�{�RV�@�`�@�{�P�TV
�@�@�@�@�@�E�@�_���@�h�P�h�i�}�[�N�j�@�@ �c�c�@�|�RV�@�`�@-�@�P�TV�@
�@(��)�@�ő�`�����x���K�肷��PC�̃n�[�h�E�F�A�Ƃ��Ă�CPU�̏������x�A�������ƂƂ���UART�̑���M�o�b�t�@�[�̗e�ʂ�����܂��B�@IBM��
�@1981�N�ɔ�������IBM/PC�ɂ�8250�Ƃ�������M�o�b�t�@�[�e�P�o�C�g��UART��pIC���g���Ă��܂����B���̌�
IC�̍����x���ƂƂ���
�@�@�@�@�@�@�@UART IC��16550�A16650�A16750�Ɛi�����A�{�[���[�g�W�F�l���[�^���lj�����Ă܂��o�b�t�@�[��16�o�C�g�A32�o�C�g�A64�o�C�g�Ƒ��������ʐM����
�@�@�@�@�@�@�@CPU���y���Ɋ�^���Ă��܂����B�X�ɁA1990�N��̌㔼�ɂ�UART�̓`�b�v�Z�b�g�̒��ɋz������Ă��܂��܂����B�ŋ߂̃`�b�v�Z�b�g����
�@�@�@�@�@�@�@UART�͒P�̂ōő�`�����x 1.5Mbps�iPC�̃V���A���|�[�g�̔\�̓A�b�v�ɂ̓h���C�o�[��H���̍��������K�v�j�A����M�o�b�t�@�[
1K�o�C�g
�@�@�@�@�@�@�@���x�͂���悤�ł��BPIC��UART��16�o�C�g���x��FIFO�o�b�t�@���ق����ł���
�@
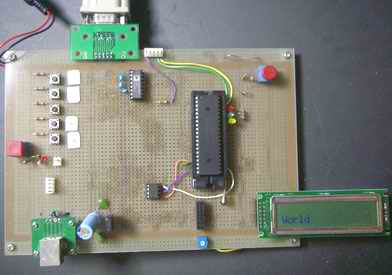
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
 �@�@�@�@�@
�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄ ��CCS�ҁ�
//PC�n�C�p�[�^�[�~�i���@���@RS232C�@���@PIC18F452�@(�t���Ȃ��j
#include "18f452.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
main()
{
char cmnd;
set_tris_c(0b10000000); //�@�|�[�g���o�̓��[�h�̐ݒ�
while(1)
{
cmnd = getc(); //�@UART�̃s��RC7�ɂP�o�C�g�̃f�[�^�������Ă���̂�҂�
printf("(Local echo of PC) \n\rRespons="); //�@stdout�i�W���o��)�ɐݒ肳��Ă���s��RC7����PC�֑��M
putc(cmnd); //��M�������������̂܂ܑ��M
printf("(Data from PIC of No INT)\n\r");
printf("\n\rCommand= "); //message
}
return 0;
}
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄�@��C18�ҁ�
#include <p18f452.h>
#include <usart.h>
#include <stdio.h>
#pragma config OSC = HSPLL // f = 40MHz ( �� 10MHz �~�@4�iPLL)�j
#pragma config WDT = OFF
#pragma config LVP = OFF
void main (void)
{
char cmnd;
// configure USART
OpenUSART( USART_TX_INT_OFF & //�����ݑ��M�FOFF
USART_RX_INT_OFF & //�����ݎ�M�FOFF
USART_ASYNCH_MODE & //���������ʐM���[�h
USART_EIGHT_BIT & //�f�[�^���F�W�r�b�g
USART_CONT_RX & //�A����M���[�h
USART_BRGH_LOW, //�{�[���[�g�F��`�����x���[�h�@
//bau rate = Fosc/(64*(spbrg + 1))
64 ); // bau rate = 40000000/(64*(64 + 1)) = 9615.4 bps
// error rate = (9615.4-9600)/9600 = 0.0016
TRISC = 0b11111101; //RC7(RX)�F input mode RC6(TX): output mode
while (1)
{
while (!DataRdyUSART()); //�@UART�̃s��RC7�ɂP�o�C�g�̃f�[�^����M�����ƂȂ�̂�҂�
cmnd = getcUSART(); //��M�f�[�^��ǂݍ���
printf("(Local echo of PC) \n\rRespons="); //�@stdout�i�W���o��)�ɐݒ肳��Ă���s��RC7����PC�֑��M
putcUSART(cmnd); //��M�������������̂܂ܑ��M�i�G�R�[�o�b�N�j
printf("(Data from PIC of No INT)\n\r");
printf("\n\rCommand= "); //message
}
CloseUSART();
}
�@
�@�����쌋�ʁ�
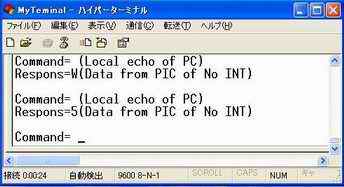
�@�EPC�̃L�[�{�[�h����@�h�W�h�̂��ƂɁhG�h����͂������̃n�C�p�[�^�[�~�i���̉�ʂł��B�n�C�p�[�^�[�~�i���̃��[�J��
�@�@�G�R�[�ݒ��ON�ɂ��Ă����܂��B
�@���A�n�C�p�[�^�[�~�i�������[�J���G�R�[��OFF�ɂȂ��Ă���Ɓ@�ȉ��̂悤�Ɂ@Command = �̂��Ƃɕ������\�������
����B
�@���@Tera Term -PIC�ԁ@����M�@�@�@���@C30�@PIC24�ҁ�
������i�d�l��
�@�@�E�@PC��COM�|�[�g��PIC���Ȃ��@Windows��Tera Term�̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�����������iPIC�ւ̑��M�����j�����[�J���G�R�[�ɂ��@�@�hSendData=�h�̂��Ƃɕ\������B
�@�@�E�@PIC�͕����f�[�^����M��������s�E���A�̐��䕶���𑗐M��A�h������hReceive_Data=�h��PC�֑��M����B
�@�@�E�@�X�Ɂ@PIC�͎�M�����AASCII�R�[�h�Ŏ�M�����̎��̕����@�y��ASCII�R�[�h�Ŏ��̎��̕������R������PC�֕ԐM����B
�@�@�E�@Tera Term �́@���[�J���G�R�[��ON�ɂ��Ă�������
�@�@
������i�̉�H�}�� �i���@��H�}��PDF�t�@�C���j
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄
/**********************************************
RS232C�@�@PC�iTera Term�j �`�@PIC
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@C30�@�@PIC24FJ64GA002
***********************************************/
#include "p24FJ64GA002.h"
#include <stdio.h>
#include <uart.h>
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
FNOSC_PRI & //�O�t�����U�q20MHZ�@PLL�Ȃ��@�@���@�V�X�e���N���b�N�F20MHZ
POSCMOD_HS //���U��H���[�h�@Oscillator Selection:�@ HS�@�i�O�t�����U��H�@���U���g�����x���FHS�j
)
char Buffer[2];
int main(void)
{
CLKDIV = 0; // set 1:1
AD1PCFG = 0xFFFF; // �|�[�gA�S�f�B�W�^���Ɏw��//ANx�̃|�[�g���ׂĂɑ��ĕK�{
TRISB = 0b0000000000001000; // �|�[�gB�@ RB3:RX�͓��͂� �A���̑�RB5�FSDA�ARB6�FSCL���͏o�͂ɐݒ�
// UART1�s�����t�@���}�b�s���O
RPINR18bits.U1RXR = 3; // UART1 RX to RP3
RPOR1bits.RP2R = 3; // UART1 TX to RP2
/// UART1�����ݒ�@9600bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
U1BRG = 64; // 9600bps at �V�X�e���N���b�N20MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 20000000/2/16/9600 - 1 = 64.1 ���@64)
U1MODE = 0b1000100000000000; // UART1�����ݒ� //U1MODE���W�X�^�ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ� //U1STA���W�X�^�ݒ�
while(1)
{ //�i�v���[�v
putsUART1("Send_Data="); //�f�[�^���M�v��
while(!DataRdyUART1()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
Buffer[0] = getcUART1(); //�o�b�t�@�[�f�[�^�ǂݍ���
Buffer[1] = Buffer[0] + 1; //ASCII�R�[�h�Ŏ��̒l���Z�b�g
Buffer[2] = Buffer[0] + 2; //ASCII�R�[�h�Ŏ��̎��̒l���Z�b�g
putsUART1("\n\r"); //���s�A���A
printf("Receive_Data=%c%c%c",Buffer[0],Buffer[1],Buffer[2]); //�ԐM�f�[�^�𑗐M
putsUART1("\n\r"); //���s�A���A
putsUART1("\n\r"); //���s�A���A
}
}
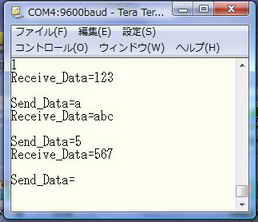
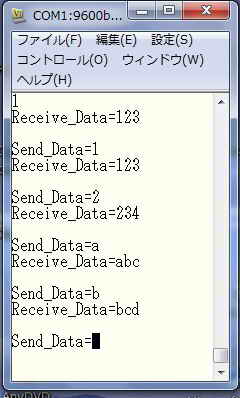
�����쌋�ʁ�
�@Tera Term ��PC�œ��삳�������ƁAPIC�̓d����ON�ɂ��āA���L���������ԂɃL�[�{�[�h������͂����ꍇ�́@Tera Term�̉�ʂ������܂��B
�@�@�@1
�@�A�@a
�@�B�@5
���⑫��
�@�E�@Send_Data=�@�̂��Ƃɂ��Ă��镶���̓��[�J���G�R�[�ɂ�镶���ł��B
�@�E�@�Ō�̍s�Ł@Send_Data=�@�@�ƂȂ��āA�L�[�{�[�h������̓��͑҂���ԂƂȂ��Ă��܂��B�@
���@������̑���M�@�@Tera Term - PIC�ԁ@�i�@Harmony + PIC32MZ2048ECH100�ҁ@�j
������i�d�l��
�@�EPC�ƃ^�[�Q�b�g�{�[�h�Ԃ�USB/RS232C�ϊ��P�[�u�����g���@PIC������݂ẴC���^�[�t�F�[�X��RS232C�Ƃ���
�@�EUSB/RS232C�ϊ��P�[�u����USB�V���A���R���o�[�^�[ REX-USB60F�i���g�b�N�V�X�e���i���j�j�Ƃ���
�@�ERS232C�ʐM�͈ȉ��Ƃ���B
�@�@�t���[����Ȃ��A9600bps�A�X�g�b�v�r�b�gx1�A�p���e�B�Ȃ�
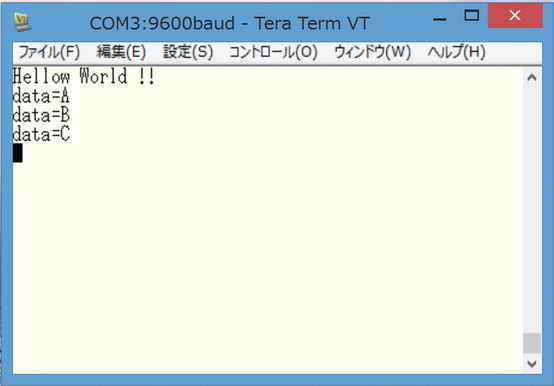
�@�EPIC�͋N������Ƃ����Ɂ@Tera Term �iPC�j�Ɂ@" Hellow Worod !!"�@�̕�����𑗐M����B
�@�EPIC�́ATera Term�iPC)����@���������M����Ă�����@data=���@�O�ɒlj����ā@��M������ԐM����B
�@�@�i��j�@
�@�@�@�@�@��M�������@A�@�̏ꍇ�̕ԐM�����@�E�E�E�E�E�E�@data=A
�@�@�@�@�@��M�������@B�@�̏ꍇ�̕ԐM�����@�E�E�E�E�E�E�@data=B
������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC32MZ2048ECH100���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain.c
//------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//-----------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
void Write_Byte(char chr) //1�o�C�g���M��
{
PLIB_USART_TransmitterByteSend(USART_ID_4, chr); //���M�o�b�t�@�[��1�o�C�g�����݁E���M
// U4TXREG = chr; ////���M�o�b�t�@�[��1�o�C�g�����݁E���M
while (!PLIB_USART_TransmitterIsEmpty(USART_ID_4)); //���M�o�b�t�@�[����ɂȂ�܂ő҂�
// while(!U4STAbits.TRMT); //���M�o�b�t�@�[����ɂȂ�܂ő҂�
}
void WriteString(const char *str) //�����M��
{
while(*str)
{
Write_Byte(*str); //�f�[�^���M
str++;
}
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
//�����M
WriteString("Hellow World !!\r\n");
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asys_ports_static.c
//-------------------------------------------------------------------------
/*******************************************************************************
SYS PORTS Static Functions for PORTS System Service
Company:
Microchip Technology Inc.
File Name:
sys_ports_static.c
Summary:
SYS PORTS static function implementations for the Ports System Service.
Description:
The Ports System Service provides a simple interface to manage the ports
on Microchip microcontrollers. This file defines the static implementation for the
Ports System Service.
Remarks:
Static functions incorporate all system ports configuration settings as
determined by the user via the Microchip Harmony Configurator GUI. It provides
static version of the routines, eliminating the need for an object ID or
object handle.
*******************************************************************************/
//DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
//DOM-IGNORE-END
#include "system_config.h"
#include "peripheral/ports/plib_ports.h"
#include "peripheral/int/plib_int.h"
void SYS_PORTS_Initialize(void)
{
//���}�b�v
/* PPS Input Remapping */
PLIB_PORTS_RemapInput(PORTS_ID_0, INPUT_FUNC_U4RX, INPUT_PIN_RPE8 ); //U4RX��RE8��ݒ�
/* PPS Output Remapping */
PLIB_PORTS_RemapOutput(PORTS_ID_0, OUTPUT_FUNC_U4TX, OUTPUT_PIN_RPE9 ); //U4TX��RE9��ݒ�
PLIB_PORTS_PinDirectionInputSet( PORTS_ID_0, PORT_CHANNEL_E, 8);//���̓|�[�g�ɐݒ�
// TRISEbits.TRISE8 = 1; //RE8�F����(RX�j�|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_E, 9);//�o�̓|�[�g�ɐݒ�
// TRISEbits.TRISE9 = 0; //RE9�F�o��(TX)�@�|�[�g�ɐݒ�
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_25, PORTS_PIN_MODE_DIGITAL); //RE8/AN25�|�[�g���f�W�^�����[�h�ɐݒ�
// ANSELEbits.ANSE8 = 0; //RE8�@�f�W�^�����[�h
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_26, PORTS_PIN_MODE_DIGITAL); //RE9/AN26�|�[�g���f�W�^�����[�h�ɐݒ�
// ANSELEbits.ANSE9 = 0; //RE9�@�f�W�^�����[�h
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "system_definitions.h"
#include "app.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
/*** DEVCFG0 ***/
#pragma config DEBUG = OFF
#pragma config JTAGEN = OFF
#pragma config ICESEL = ICS_PGx1
#pragma config TRCEN = OFF
#pragma config BOOTISA = MIPS32
#pragma config FECCCON = OFF_UNLOCKED
#pragma config FSLEEP = OFF
#pragma config DBGPER = PG_ALL
#pragma config EJTAGBEN = NORMAL
#pragma config CP = OFF
/*** DEVCFG1 ***/
#pragma config FNOSC = SPLL
#pragma config DMTINTV = WIN_127_128
#pragma config FSOSCEN = OFF
#pragma config IESO = OFF
#pragma config POSCMOD = HS
#pragma config OSCIOFNC = OFF
#pragma config FCKSM = CSECME
#pragma config WDTPS = PS1048576
#pragma config WDTSPGM = STOP
#pragma config FWDTEN = OFF
#pragma config WINDIS = NORMAL
#pragma config FWDTWINSZ = WINSZ_25
#pragma config DMTCNT = DMT31
#pragma config FDMTEN = OFF
/*** DEVCFG2 ***/
#pragma config FPLLIDIV = DIV_3
#pragma config FPLLRNG = RANGE_5_10_MHZ
#pragma config FPLLICLK = PLL_FRC //�o�O�C��
//#pragma config FPLLICLK = PLL_POSC
#pragma config FPLLMULT = MUL_50
#pragma config FPLLODIV = DIV_2
#pragma config UPLLFSEL = FREQ_24MHZ
#pragma config UPLLEN = ON
/*** DEVCFG3 ***/
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = OFF
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="DRV_Timer Configuration">
/*** TMR Driver Initialization Data ***/
const DRV_TMR_INIT drvTmr0InitData =
{
.moduleInit.sys.powerState = DRV_TMR_POWER_STATE_IDX0,
.tmrId = DRV_TMR_PERIPHERAL_ID_IDX0,
.clockSource = DRV_TMR_CLOCK_SOURCE_IDX0,
.prescale = DRV_TMR_PRESCALE_IDX0,
.mode = DRV_TMR_OPERATION_MODE_IDX0,
.interruptSource = DRV_TMR_INTERRUPT_SOURCE_IDX0,
.asyncWriteEnable = false,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="DRV_USART Configuration">
const DRV_USART_INIT drvUsart0InitData =
{
.moduleInit = DRV_USART_POWER_STATE_IDX0,
.usartID = DRV_USART_PERIPHERAL_ID_IDX0,
.mode = DRV_USART_OPER_MODE_IDX0,
.modeData = DRV_USART_OPER_MODE_DATA_IDX0,
.flags = DRV_USART_INIT_FLAGS_IDX0,
.brgClock = DRV_USART_BRG_CLOCK_IDX0,
.lineControl = DRV_USART_LINE_CNTRL_IDX0,
.baud = DRV_USART_BAUD_RATE_IDX0,
.handshake = DRV_USART_HANDSHAKE_MODE_IDX0,
.interruptTransmit = DRV_USART_XMIT_INT_SRC_IDX0,
.interruptReceive = DRV_USART_RCV_INT_SRC_IDX0,
.queueSizeTransmit = DRV_USART_XMIT_QUEUE_SIZE_IDX0,
.queueSizeReceive = DRV_USART_RCV_QUEUE_SIZE_IDX0,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="SYS_TMR Configuration">
/*** TMR Service Initialization Data ***/
const SYS_TMR_INIT sysTmrInitData =
{
.moduleInit = {SYS_MODULE_POWER_RUN_FULL},
.drvIndex = DRV_TMR_INDEX_0,
.tmrFreq = 1000,
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="SYS_DEVCON Configuration">
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize( NULL );
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_CLK_SystemFrequencyGet());
SYS_PORTS_Initialize();
/* Initialize Drivers */
sysObj.drvTmr0 = DRV_TMR_Initialize(DRV_TMR_INDEX_0, (SYS_MODULE_INIT *)&drvTmr0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_T9, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_T9, INT_SUBPRIORITY_LEVEL0);
sysObj.drvUsart0 = DRV_USART_Initialize(DRV_USART_INDEX_0, (SYS_MODULE_INIT *)&drvUsart0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_TX, INT_PRIORITY_LEVEL3);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_TX, INT_SUBPRIORITY_LEVEL0);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_RX, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_RX, INT_SUBPRIORITY_LEVEL3);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_FAULT, INT_PRIORITY_LEVEL3);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_FAULT, INT_SUBPRIORITY_LEVEL0);
/*
//���W�X�^���ڐݒ�
U4MODEbits.ON = 1; //UART4 �C�l�[�u��
U4MODEbits.PDSEL = 0b00; //�f�[�^��8�r�b�g�A�p���e�B�Ȃ�
U4MODEbits.STSEL = 0; //�X�g�b�v�r�b�gx1��
// U4MODEbits.BRGH = 1; //�n�C�X�s�[�h�{�[���[�g�@�C�l�[�u��
U4MODEbits.UEN = 0; //UARTx Enable bits
//00: UxTX and UxRX pins are enabled and used; UxCTS and UxRTS/UxBCLK pins are controlled
//by corresponding bits in the PORTx register
U4STAbits.URXEN = 1; //���V�[�o�[�C�l�[�u��
U4STAbits.UTXEN = 1; //�g�����X�~�b�^�[�C�l�[�u��
U4STAbits.URXISEL = 0; //00: �o�b�t�@��1������M�����犄���݃t���O������
//Interrupt flag bit is asserted while receive buffer is not empty (i.e., has at least 1 data character)
U4BRG = (unsigned int)(100000000/16/9600 - 1); //baud rate: 9600bps //U4BRG = Fosc/BRGH/Baud Rate -1
*/
/* Initialize RX interrupt */
PLIB_INT_SourceEnable(INT_ID_0, INT_SOURCE_USART_4_RECEIVE); //UART4��M��������
// IEC5bits.U4RXIE = 1; //UART4��M�������� //IEC5<11>
/* Initialize System Services */
SYS_INT_Initialize();
/*** TMR Service Initialization Code ***/
sysObj.sysTmr = SYS_TMR_Initialize(SYS_TMR_INDEX_0, (const SYS_MODULE_INIT * const)&sysTmrInitData);
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_interrupt.c
//----------------------------------------------------------------------
/*******************************************************************************
System Interrupts File
File Name:
system_int.c
Summary:
Raw ISR definitions.
Description:
This file contains a definitions of the raw ISRs required to support the
interrupt sub-system.
Summary:
This file contains source code for the interrupt vector functions in the
system.
Description:
This file contains source code for the interrupt vector functions in the
system. It implements the system and part specific vector "stub" functions
from which the individual "Tasks" functions are called for any modules
executing interrupt-driven in the MPLAB Harmony system.
Remarks:
This file requires access to the systemObjects global data structure that
contains the object handles to all MPLAB Harmony module objects executing
interrupt-driven in the system. These handles are passed into the individual
module "Tasks" functions to identify the instance of the module to maintain.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2011-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <xc.h>
#include <sys/attribs.h>
#include "app.h"
#include "system_definitions.h"
char Buf[17];
// *****************************************************************************
// *****************************************************************************
// Section: System Interrupt Vector Functions
// *****************************************************************************
// *****************************************************************************
void __ISR(_TIMER_9_VECTOR, ipl1) _IntHandlerDrvTmrInstance0(void)
{
DRV_TMR_Tasks_ISR(sysObj.drvTmr0);
}
void __ISR(_UART4_TX_VECTOR, ipl3) _IntHandlerDrvUsartTransmitInstance0(void)
{
DRV_USART_TasksTransmit(sysObj.drvUsart0);
DRV_USART_TasksError(sysObj.drvUsart0);
}
void __ISR(_UART4_RX_VECTOR, ipl1) _IntHandlerDrvUsartReceiveInstance0(void)
{
if (PLIB_USART_ReceiverDataIsAvailable(USART_ID_4)) //��M�f�[�^�L�̏ꍇ
// if(U4STAbits.URXDA == 1) //��M�f�[�^�L�̏ꍇ //Receive buffer has data, at least one more character can be read
{
char data;
data = PLIB_USART_ReceiverByteReceive(USART_ID_4); //��M�f�[�^�ǂݍ���
//data = U4RXREG; //��M�o�b�t�@�ǂݍ���
sprintf(Buf,"data=%c\r\n",data);
WriteString(Buf); //�����M
}
/* Clear pending interrupt */
PLIB_INT_SourceFlagClear(INT_ID_0, INT_SOURCE_USART_4_RECEIVE);
//IFS5bits.U4RXIF = 0; //RX�����݃t���O�N���A
}
void __ISR(_UART4_FAULT_VECTOR, ipl3) _IntHandlerDrvUsartErrorInstance0(void)
{
SYS_ASSERT(false, "USART Driver Instance 0 Error");
}
/*******************************************************************************
End of File
*/
�@�����쌋�ʁ�
���L���쌋�ʌ�́@Tera Term��ʂł��B
�@1.�@Tera Term �𗧂��グ����ԂŁ@PIC32MZ2048ECH100���N������B�@���@Hellow Wolrd !!
�@2.�@�L�[�{�[�h�Ł@A���@�Ō��@�@�@���@data=A
�@3.�@�L�[�{�[�h�Ł@B���@�Ō��@�@�@���@data=B
�@4.�@�L�[�{�[�h�Ł@C���@�Ō��@�@�@���@data=C
�i�Q�j������̑���M�@�i�t���[����Ȃ��APIC���FLCD�t�A�@�����݂���A�^�C���A�E�g�Ȃ��A�n�C�p�[�^�[�~�i�� - PIC�ԁj
�����ݐ��䃌�W�X�^��USART��M�����t���O�����������A�����݂������邱�Ƃ��ł��܂��B���̎�M�����݂���
�@���ăf�[�^����M������@���Љ�܂��B
�@������i�d�l��
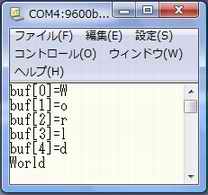
�@�@PC��COM�|�[�g��PIC���Ȃ��@Windows���n�C�p�[�^�[�~�i���̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�������������G�R�[�o�b�N�ɂ��@�ȉ��̂悤�ɕ\������
�@�@�@�@�i��j�@�@�R�ԖڂɃL�[�C������������D�̏ꍇ�@�c�c�@�@buf[2]=D
�@�@�E�@�G���^�[�L�[�������ꂽ�ꍇ�́A����܂łɃL�[�C���������������ׂĂP�s�ɘA�����ĕ\������邱��
�@�@�@�@�i��j�@�@�hA�h�@�hB�h�@�hC�h�@�hD�h�@�hE�h�@�ƃL�[�C���������ƂɃG���^�[���[���L�[�C�����ꂽ�ꍇ�@�@�c�c�@ABCDE
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F452���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
 �@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
| �ȉ��̃v���O������̒��ɂ���t���\���퐧�䃉�C�u�����@1llcd_lib.c�́@��ՓN�炳�����v���ꂽ���̂ł� |
�@���v���O�����၄ ��CCS�ҁ�
//�@PC�̃n�C�p�[�^�[�~�i���@���@RS232C�@���@PIC18F452�@�{�@LCD
//�@RDA�����݂ɂ���M
/*
PC���j�^�o��
buf[0]=a
buf[1]=b
buf[2]=c
abc
buf[0]=1
buf[1]=2
buf[2]=3
buf[3]=4
buf[4]=5
12345
*/
#include "18f452.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7,stream=PC) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
char buf[20];
int i =0;
#INT_RDA
void rs232c()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
printf(buf); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
putc('\r');putc('\n');putc('\r');putc('\n'); //�P�s������
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
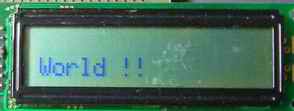
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
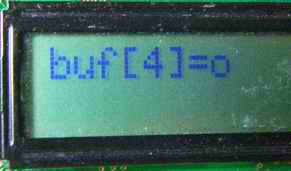
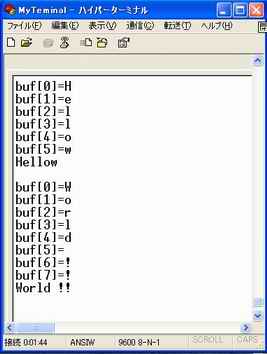
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
i++;
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
enable_interrupts(INT_RDA);
enable_interrupts(GLOBAL);
while(1)
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄��C18�ҁ�
/*
PC-PIC�ԁ@RS232C�ʐM�@
�@�@��M�@�F�@��M�������ݕ���
�@�@PC�@�F�@�n�C�p�[�^�[�~�i��
�@�@PIC�@�F�@18F452�@�t���t
*/
#include <p18f452.h>
#include <usart.h>
#include <stdio.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config OSC = HSPLL // f = 40MHz ( �� 10MHz �~�@4�iPLL)�j
#pragma config WDT = OFF
#pragma config LVP = OFF
char buf[20]; // �^�C�v���������p�̃��W�X�^
int i = 0;
void RS232(void);
#pragma code low_vector=0x18 //��ʃ��x��������
void low_interrupt (void)
{
_asm GOTO RS232 _endasm
}
#pragma code
#pragma interruptlow RS232
void RS232() //�@��M�����݊�
{
char Buffer[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* str;
PIR1bits.RCIF = 0; //PIR1 ���W�X�^��RCIF�r�b�g�i��M�t���O�j���N���A
buf[i] = getcUSART(); //��M�f�[�^��ǂݍ���
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
str = &buf[0]; //�@�|�C���^�ɃA�h���X����
printf("%s",str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
printf("\n\r\n\r"); //�P�s������
//PIC���t���ւ̕\��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//PIC���t���ւ̕\��
lcd_clear();//�@�t���I�[���N���A
sprintf(Buffer,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
str = &Buffer[0]; //�@�|�C���^�ɃA�h���X����
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
i++;
}
}
void main (void)
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* tempStr;
TRISC = 0b11111101; //RC7(RX)�F input mode RC6(TX): output mode
OpenUSART( USART_TX_INT_OFF & //���M�����݁FOFF
USART_RX_INT_ON & //�����ݎ�M�FON
USART_ASYNCH_MODE & //���������ʐM���[�h
USART_EIGHT_BIT & //�f�[�^���F�W�r�b�g
USART_CONT_RX & //�A����M���[�h
USART_BRGH_LOW, //�{�[���[�g�F��`�����x���[�h�@
//bau rate = Fosc/(64*(spbrg + 1))
64 ); // = 40000000/(64*(64 + 1)) = 9615.4 bps
// error rate = (9615.4-9600)/9600 = 0.0016
//PIC���t���\��
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
sprintf(tempBuf,"Start !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
tempStr = &tempBuf[0]; //�@�|�C���^�ɃA�h���X����
while(*tempStr) //������I�[�� '\0'�����o����܂�
{
lcd_data(*tempStr); //�@�P�����\��
tempStr++;
}
RCONbits.IPEN = 0; //�����ݗD�揇�ʐ���FOFF�@�iRCON ���W�X�^��IPEN�r�b�g = 0)
INTCONbits.GIE = 1; //�S��������
INTCONbits.PEIE = 1; //���Ӌ@�\�̊����ݗL��
while (1)
{
}
CloseUSART();
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//*************************************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�����쌋�ʁ�
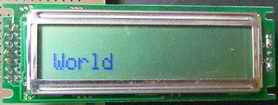
�@�P�DPC�̃L�[�{�[�h����hHello�h���L�[�C�����āA���̃L�[�C����҂��Ă����Ԃɂ�����@�n�C�p�[�^�[�~�i���Ɖt����
�@�@��ʂ��ȉ��Ɏ����܂��B
| ���n�C�p�[�^�[�~�i���̉�ʁ� |
|
���t����ʁ� |
 |
|
 |
�@�Q�DPC�̃L�[�{�[�h����hHellow�h�@�@�h�G���^�[�h�@�hWorld !!�h�@�h�G���^�[�h�@�Ɓ@�L�[�C��������̃n�C�p�[�^�[�~�i���Ɖt����
�@�@��ʂ��ȉ��Ɏ����܂��B
| ���n�C�p�[�^�[�~�i����ʁ� |
|
���t����ʁ� |
 |
|
 |
������̑���M�@�i�t���[����Ȃ��APIC���FLCD�t�A�@�����݂���ATera Term - PIC�ԁj
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��PIC18F4550�@CCS�ҁ�
�����ݐ��䃌�W�X�^��USART��M�����t���O�����������A�����݂������邱�Ƃ��ł��܂��B���̎�M�����݂���
�@���ăf�[�^����M������@���Љ�܂��B
�@������i�d�l��
�@�@PC��COM�|�[�g��PIC���Ȃ��@Windows�� Tera�@Term�@�̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�������������G�R�[�o�b�N�ɂ��@�ȉ��̂悤�ɕ\������
�@�@�@�@�i��j�@�@�R�ԖڂɃL�[�C������������D�̏ꍇ�@�c�c�@�@buf[2]=D
�@�@�E�@�G���^�[�L�[�������ꂽ�ꍇ�́A����܂łɃL�[�C���������������ׂĂP�s�ɘA�����ĕ\������邱��
�@�@�@�@�i��j�@�@�hA�h�@�hB�h�@�hC�h�@�hD�h�@�hE�h�@�ƃL�[�C���������ƂɃG���^�[���[���L�[�C�����ꂽ�ꍇ�@�@�c�c�@ABCDE
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F4550���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
�@���v���O�����၄
//�@PC�� Tera Term�@���@RS232C�@���@PIC18F4550�@�{�@LCD
//�@RDA�����݂ɂ���M
/*
PC���j�^�o��
buf[0]=a
buf[1]=b
buf[2]=c
abc
buf[0]=1
buf[1]=2
buf[2]=3
buf[3]=4
buf[4]=5
12345
*/
#include "18f4550.h"
#use delay(clock=20000000) // 20MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7,stream=PC) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
char buf[20];
int i =0;
#INT_RDA
void rs232c()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
printf(buf); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
putc('\r');putc('\n');putc('\r');putc('\n'); //�P�s������
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
i++;
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
enable_interrupts(INT_RDA);
enable_interrupts(GLOBAL);
while(1)
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�����쌋�ʁ�
�@������̑���M�@PC�iTera Term�j�|PIC�ԁ@���荞�݂Ȃ��@�@�@PIC32MX��
������i�d�l��
�@�@�E�@PC��COM�|�[�g��PIC���Ȃ��@Windows��Tera Term�̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�����������iPIC�ւ̑��M�����j�����[�J���G�R�[�ɂ��@�@�hSendData=�h�̂��Ƃɕ\������B
�@�@�E�@PIC�͕����f�[�^����M��������s�E���A�̐��䕶���𑗐M��A�h������hReceive_Data=�h��PC�֑��M����B
�@�@�E�@�X�Ɂ@PIC�͎�M�����AASCII�R�[�h�Ŏ�M�����̎��̕����@�y��ASCII�R�[�h�Ŏ��̎��̕������R������PC�֕ԐM����B
�@�@�E�@Tera Term �́@���[�J���G�R�[��ON�ɂ��Ă�������
�@�@�E�@PIC���ł́@�t���P�s�ڂɎ�M�������A�Q�s�ڂɂ͑��M������\������B
�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC32MX795F512L���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
//�@�@�@�@UART PC-PIC�@
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX795F512L�@
#include <proc/p32mx795f512l.h> //PIC32MX795F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include <stdio.h>
#include "1lcd_lib_C32.h"
// Configuration
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
char Buffer[3];
char Buf[17]; //
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISE = 0; //E�|�[�g���o�̓��[�h�ɐݒ�
OpenUART2 //UART2�̐ݒ�iU2MODE���W�X�^,U2STA���W�X�^,U2BRG���W�X�^�̐ݒ�j
(
UART_EN | // UART enable/disable
// UART_RX_TX | //UART communication with ALT pins
// UART_DIS_WAKE | //UART Wake-up on Start
// UART_DIS_LOOPBACK | //UART Loopback mode enable/disable
// UART_DIS_ABAUD | //Input to Capture module
UART_NO_PAR_8BIT | // Parity and data bits select
UART_1STOPBIT | // Number of Stop bits
// UART_IRDA_DIS | //IRDA Enable/Disable
// UART_MODE_SIMPLEX | //RTS Mode Select
// UART_MODE_FLOWCTRL | //RTS Mode Select
// UART_DIS_BCLK_CTS_RTS | //
// UART_NORMAL_RX | //Recievie Polarity
UART_BRGH_SIXTEEN, //BRGH = 16 //High Baud Rate Select
// UART_INT_TX_BUF_EMPTY | //UART Transmission mode interrupt flag select
// UART_TX_PIN_LOW | //UART Transmit Break bit
UART_TX_ENABLE | //UART transmit enable/disable
UART_RX_ENABLE , //UART recieve enable/disable
// UART_INT_RX_CHAR | //UART Receive Interrupt mode select
// UART_ADR_DETECT_DIS | //UART address detect enable/disable
// UART_RX_OVERRUN_CLEAR //UART OVERRUN bit clear
(unsigned int)(80000000/16/9600-1) // = Fosc/BRGH/Baud Rate -1 //baud rate: 9600bps
);
setbuf(stdout,NULL); //Line buffering off
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"UART PC_PIC !!");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���\��
while(1)
{ //�i�v���[�v
putsUART2("Send_Data="); //�f�[�^���M�v��
while(!DataRdyUART2()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
Buffer[0] = getcUART2(); //�o�b�t�@�[�f�[�^�ǂݍ���
Buffer[1] = Buffer[0] + 1; //ASCII�R�[�h�Ŏ��̒l���Z�b�g
Buffer[2] = Buffer[0] + 2; //ASCII�R�[�h�Ŏ��̎��̒l���Z�b�g
putsUART2("\n\r"); //���s�A���A
printf("Receive_Data=%c%c%c",Buffer[0],Buffer[1],Buffer[2]); //�ԐM�f�[�^�𑗐M
lcd_clear(); //�S����
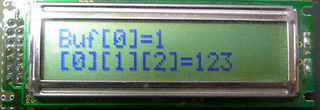
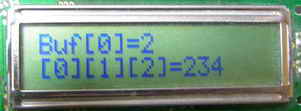
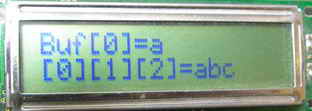
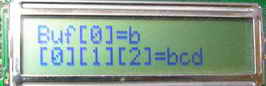
sprintf(Buf,"Buf[0]=%c",Buffer[0]); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"[0][1][2]=%c%c%c",Buffer[0],Buffer[1],Buffer[2]); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
putsUART2("\n\r"); //���s�A���A
putsUART2("\n\r"); //���s�A���A
}
}
�����쌋�ʁ�
| PC�iTera Term) |
 |
| PIC���t���\�� |
�@�@�@1�𑗐M�����ꍇ�@�@ |
 |
| �@�@2�𑗐M�����ꍇ |
 |
| �@�@a�𑗐M�����ꍇ |
 |
| �@�@b�𑗐M�����ꍇ |
 |
������̑���M�@PC�iTera Term�j�|PIC�ԁ@ ���荞�ݗL�@�@�@PIC32MX��
������i�d�l��
�@�@�E�@PC��COM�|�[�g��PIC���Ȃ��@Windows��Tera Term�̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�����������iPIC�ւ̑��M�����j�����[�J���G�R�[�ɂ��@�@�hSendData=�h�̂��Ƃɕ\������B
�@�@�E�@PIC�͕����f�[�^����M��������s�E���A�̐��䕶���𑗐M��A�h������hReceive_Data=�h��PC�֑��M����B
�@�@�E�@�X�Ɂ@PIC�͎�M�����AASCII�R�[�h�Ŏ�M�����̎��̕����@�y��ASCII�R�[�h�Ŏ��̎��̕������R������PC�֕ԐM����B
�@�@�E�@Tera Term �́@���[�J���G�R�[��ON�ɂ��Ă�������
�@�@�E�@PIC���ł́@�t���P�s�ڂɎ�M�������A�Q�s�ڂɂ͑��M������\������B
�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC32MX795F512L���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄
//�@�@�@�@UART PC-PIC�@ //���荞�ݕ���
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX795F512L�@
#include <proc/p32mx795f512l.h> //PIC32MX795F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include <stdio.h>
#include "1lcd_lib_C32.h"
// Configuration
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
char Buffer[3];
char Buf[17]; //
void __ISR(_UART2_VECTOR, ipl2) IntUart2Handler(void)
{
if(mU2RXGetIntFlag()) //�@RX�̊��荞�݁H
{
mU2RXClearIntFlag(); //�@���荞�݃t���O�N���A
putsUART2("Send_Data="); //�f�[�^���M�v��
while(!DataRdyUART2()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
Buffer[0] = getcUART2(); //�o�b�t�@�[�f�[�^�ǂݍ���
Buffer[1] = Buffer[0] + 1; //ASCII�R�[�h�Ŏ��̒l���Z�b�g
Buffer[2] = Buffer[0] + 2; //ASCII�R�[�h�Ŏ��̎��̒l���Z�b�g
putsUART2("\n\r"); //���s�A���A
printf("Receive_Data=%c%c%c",Buffer[0],Buffer[1],Buffer[2]); //�ԐM�f�[�^�𑗐M
lcd_clear(); //�S����
sprintf(Buf,"Buf[0]=%c",Buffer[0]); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"[0][1][2]=%c%c%c",Buffer[0],Buffer[1],Buffer[2]); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
putsUART2("\n\r"); //���s�A���A
putsUART2("\n\r"); //���s�A���A
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISE = 0; //E�|�[�g���o�̓��[�h�ɐݒ�
OpenUART2 //UART2�̐ݒ�iU2MODE���W�X�^,U2STA���W�X�^,U2BRG���W�X�^�̐ݒ�j
(
UART_EN | // UART enable/disable
// UART_RX_TX | //UART communication with ALT pins
// UART_DIS_WAKE | //UART Wake-up on Start
// UART_DIS_LOOPBACK | //UART Loopback mode enable/disable
// UART_DIS_ABAUD | //Input to Capture module
UART_NO_PAR_8BIT | // Parity and data bits select
UART_1STOPBIT | // Number of Stop bits
// UART_IRDA_DIS | //IRDA Enable/Disable
// UART_MODE_SIMPLEX | //RTS Mode Select
// UART_MODE_FLOWCTRL | //RTS Mode Select
// UART_DIS_BCLK_CTS_RTS | //
// UART_NORMAL_RX | //Recievie Polarity
UART_BRGH_SIXTEEN, //BRGH = 16 //High Baud Rate Select
// UART_INT_TX_BUF_EMPTY | //UART Transmission mode interrupt flag select
// UART_TX_PIN_LOW | //UART Transmit Break bit
UART_TX_ENABLE | //UART transmit enable/disable
UART_RX_ENABLE , //UART recieve enable/disable
// UART_INT_RX_CHAR | //UART Receive Interrupt mode select
// UART_ADR_DETECT_DIS | //UART address detect enable/disable
// UART_RX_OVERRUN_CLEAR //UART OVERRUN bit clear
(unsigned int)(80000000/16/9600-1) // = Fosc/BRGH/Baud Rate -1 //baud rate: 9600bps
);
setbuf(stdout,NULL); //Line buffering off
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"UART PC_PIC !!");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���ɕ\��
ConfigIntUART2(UART_INT_PR2 | UART_RX_INT_EN); //UART2���荞�݃��x�������x��2�ɐݒ�
INTEnableSystemMultiVectoredInt(); //�}���`�x�N�g�����荞����
while(1)
{ //�i�v���[�v
}
}
�����쌋�ʁ�
| PC�iTera Term) |
|
| PIC���t���\�� |
�@�@�@1�𑗐M�����ꍇ�@�@ |
|
| �@�@2�𑗐M�����ꍇ |
|
| �@�@a�𑗐M�����ꍇ |
|
| �@�@b�𑗐M�����ꍇ |
|
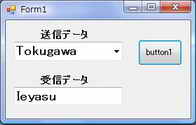
���@������̑���M�@�@PC - PIC�ԁ@�i�@Harmony + PIC32MZ2048ECH100�ҁ@�j
�@PC���̃\�t�g�ɂ��Ắ@VC#�@PC�\�t�g�@������M�@���Q�Ɗ肢�܂��B
������i�d�l��
�@�EPC�ƃ^�[�Q�b�g�{�[�h�Ԃ�USB/RS232C�ϊ��P�[�u�����g���@PIC������݂ẴC���^�[�t�F�[�X��RS232C�Ƃ���
�@�EUSB/RS232C�ϊ��P�[�u����USB�V���A���R���o�[�^�[ REX-USB60F�i���g�b�N�V�X�e���i���j�j�Ƃ���
�@�ERS232C�ʐM�͈ȉ��Ƃ���B
�@�@�t���[����Ȃ��A9600bps�A�X�g�b�v�r�b�gx1�A�p���e�B�Ȃ�
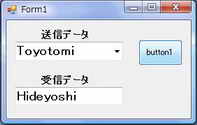
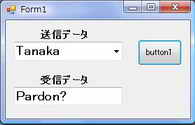
�@�E�p�\�R�������@���L���M������ɑ��@PIC���͑Ή����镶�����ԐM���邱��
�@�@Japan ---> Tokyo
�@�@America ---> Washinton
�@�@U.K.�@---> London
�@�@France --> Paris
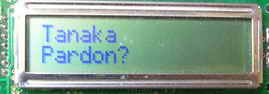
�@�@���̑� --> Pardon ?
�@�EPC���́A��M��������e�L�X�g�G�f�B�^�ɕ\���̂���
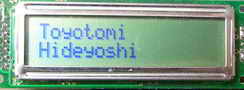
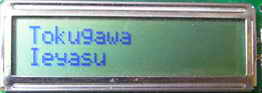
�@�EPIC���́A�@��M������@�y�ѕԐM��������L�����N�^�t���̂��ꂼ���i�Ɖ��i�ɕ\���̂���
�@�E�J�����@�@ver.1.02�@Harmony�@�@�@ver.1.34�@XC32�@�@�@ver2.30�@MPLABX�@�@�@�@rev.5�@PIC32MZ2048ECH100
�@�@�@�@�@�@�@�@�@Windows 8.1�@�@�@VC#2012
�@
������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC32MZ2048ECH100���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain.c
//------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//----------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
#include "1lcd_lib_C32.h"
int delay_Clock = 200000000; //200MHz
char Buf[17]; //1�t���\���o�b�t�@�[
int ix = 0;
char* str;
char buf[20];
extern char data;
extern int Flag ;
char Japan[] = "Japan";
char America[] = "America";
char UK[] = "U.K.";
char France[] = "France";
char Tokyo[] = "Tokyo";
char Washinton[] = "Washinton";
char London[] = "London";
char Paris[] = "Paris";
char Pardon[] = "Pardon ?";
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
void Write_Byte(char chr) //1�o�C�g���M��
{
PLIB_USART_TransmitterByteSend(USART_ID_4, chr); //���M�o�b�t�@�[��1�o�C�g�����݁E���M
// U4TXREG = chr; ////���M�o�b�t�@�[��1�o�C�g�����݁E���M
while (!PLIB_USART_TransmitterIsEmpty(USART_ID_4)); //���M�o�b�t�@�[����ɂȂ�܂ő҂�
// while(!U4STAbits.TRMT); //���M�o�b�t�@�[����ɂȂ�܂ő҂�
}
void WriteString(const char *str) //�����M��
{
while(*str)
{
Write_Byte(*str); //�f�[�^���M
str++;
}
}
void SendData(void)
{
buf[ix] = data;
if(buf[ix] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[ix] = '\0';
if(strcmp(buf,Japan) == 0)str = Tokyo;
else if(strcmp(buf,America) == 0) str = Washinton;
else if(strcmp(buf,UK) == 0) str = London;
else if(strcmp(buf,France) == 0) str = Paris;
else str = Pardon;
ix = 0;
sprintf(Buf,"%s\n",str);
WriteString(Buf); //�����M
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"%s ",buf);
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s ",str);
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
ix++;
}
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"UART to PC ");//
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf," Start !! "); //
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(2000);
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asys_ports_static.c
//-------------------------------------------------------------------------------
/*******************************************************************************
SYS PORTS Static Functions for PORTS System Service
Company:
Microchip Technology Inc.
File Name:
sys_ports_static.c
Summary:
SYS PORTS static function implementations for the Ports System Service.
Description:
The Ports System Service provides a simple interface to manage the ports
on Microchip microcontrollers. This file defines the static implementation for the
Ports System Service.
Remarks:
Static functions incorporate all system ports configuration settings as
determined by the user via the Microchip Harmony Configurator GUI. It provides
static version of the routines, eliminating the need for an object ID or
object handle.
*******************************************************************************/
//DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
//DOM-IGNORE-END
#include "system_config.h"
#include "peripheral/ports/plib_ports.h"
#include "peripheral/int/plib_int.h"
void SYS_PORTS_Initialize(void)
{
//���}�b�v
/* PPS Input Remapping */
PLIB_PORTS_RemapInput(PORTS_ID_0, INPUT_FUNC_U4RX, INPUT_PIN_RPE8 ); //U4RX��RE8��ݒ�
/* PPS Output Remapping */
PLIB_PORTS_RemapOutput(PORTS_ID_0, OUTPUT_FUNC_U4TX, OUTPUT_PIN_RPE9 ); //U4TX��RE9��ݒ�
PLIB_PORTS_PinDirectionInputSet( PORTS_ID_0, PORT_CHANNEL_E, 8);//���̓|�[�g�ɐݒ�
// TRISEbits.TRISE8 = 1; //RE8�F����(RX�j�|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_E, 9);//�o�̓|�[�g�ɐݒ�
// TRISEbits.TRISE9 = 0; //RE9�F�o��(TX)�@�|�[�g�ɐݒ�
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_25, PORTS_PIN_MODE_DIGITAL); //RE8/AN25�|�[�g���f�W�^�����[�h�ɐݒ�
// ANSELEbits.ANSE8 = 0; //RE8�@�f�W�^�����[�h
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_26, PORTS_PIN_MODE_DIGITAL); //RE9/AN26�|�[�g���f�W�^�����[�h�ɐݒ�
// ANSELEbits.ANSE9 = 0; //RE9�@�f�W�^�����[�h
//�t���|�[�g���o�͐ݒ�-----------------------------
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 15 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 14 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 13 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 12 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 10 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 9 );
/*
TRISBbits.TRISB15 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB14 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB13 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB12 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA10 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA9 = 0; //�L�����N�^�t���|�[�g�ݒ�
*/
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//-------------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "system_definitions.h"
#include "app.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
/*** DEVCFG0 ***/
#pragma config DEBUG = OFF
#pragma config JTAGEN = OFF
#pragma config ICESEL = ICS_PGx1
#pragma config TRCEN = OFF
#pragma config BOOTISA = MIPS32
#pragma config FECCCON = OFF_UNLOCKED
#pragma config FSLEEP = OFF
#pragma config DBGPER = PG_ALL
#pragma config EJTAGBEN = NORMAL
#pragma config CP = OFF
/*** DEVCFG1 ***/
#pragma config FNOSC = SPLL
#pragma config DMTINTV = WIN_127_128
#pragma config FSOSCEN = OFF
#pragma config IESO = OFF
#pragma config POSCMOD = HS
#pragma config OSCIOFNC = OFF
#pragma config FCKSM = CSECME
#pragma config WDTPS = PS1048576
#pragma config WDTSPGM = STOP
#pragma config FWDTEN = OFF
#pragma config WINDIS = NORMAL
#pragma config FWDTWINSZ = WINSZ_25
#pragma config DMTCNT = DMT31
#pragma config FDMTEN = OFF
/*** DEVCFG2 ***/
#pragma config FPLLIDIV = DIV_3
#pragma config FPLLRNG = RANGE_5_10_MHZ
#pragma config FPLLICLK = PLL_FRC //�o�O�C��
//#pragma config FPLLICLK = PLL_POSC
#pragma config FPLLMULT = MUL_50
#pragma config FPLLODIV = DIV_2
#pragma config UPLLFSEL = FREQ_24MHZ
#pragma config UPLLEN = ON
/*** DEVCFG3 ***/
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = OFF
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="DRV_Timer Configuration">
/*** TMR Driver Initialization Data ***/
const DRV_TMR_INIT drvTmr0InitData =
{
.moduleInit.sys.powerState = DRV_TMR_POWER_STATE_IDX0,
.tmrId = DRV_TMR_PERIPHERAL_ID_IDX0,
.clockSource = DRV_TMR_CLOCK_SOURCE_IDX0,
.prescale = DRV_TMR_PRESCALE_IDX0,
.mode = DRV_TMR_OPERATION_MODE_IDX0,
.interruptSource = DRV_TMR_INTERRUPT_SOURCE_IDX0,
.asyncWriteEnable = false,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="DRV_USART Configuration">
const DRV_USART_INIT drvUsart0InitData =
{
.moduleInit = DRV_USART_POWER_STATE_IDX0,
.usartID = DRV_USART_PERIPHERAL_ID_IDX0,
.mode = DRV_USART_OPER_MODE_IDX0,
.modeData = DRV_USART_OPER_MODE_DATA_IDX0,
.flags = DRV_USART_INIT_FLAGS_IDX0,
.brgClock = DRV_USART_BRG_CLOCK_IDX0,
.lineControl = DRV_USART_LINE_CNTRL_IDX0,
.baud = DRV_USART_BAUD_RATE_IDX0,
.handshake = DRV_USART_HANDSHAKE_MODE_IDX0,
.interruptTransmit = DRV_USART_XMIT_INT_SRC_IDX0,
.interruptReceive = DRV_USART_RCV_INT_SRC_IDX0,
.queueSizeTransmit = DRV_USART_XMIT_QUEUE_SIZE_IDX0,
.queueSizeReceive = DRV_USART_RCV_QUEUE_SIZE_IDX0,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="SYS_TMR Configuration">
/*** TMR Service Initialization Data ***/
const SYS_TMR_INIT sysTmrInitData =
{
.moduleInit = {SYS_MODULE_POWER_RUN_FULL},
.drvIndex = DRV_TMR_INDEX_0,
.tmrFreq = 1000,
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="SYS_DEVCON Configuration">
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize( NULL );
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_CLK_SystemFrequencyGet());
SYS_PORTS_Initialize();
/* Initialize Drivers */
sysObj.drvTmr0 = DRV_TMR_Initialize(DRV_TMR_INDEX_0, (SYS_MODULE_INIT *)&drvTmr0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_T9, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_T9, INT_SUBPRIORITY_LEVEL0);
sysObj.drvUsart0 = DRV_USART_Initialize(DRV_USART_INDEX_0, (SYS_MODULE_INIT *)&drvUsart0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_TX, INT_PRIORITY_LEVEL3);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_TX, INT_SUBPRIORITY_LEVEL0);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_RX, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_RX, INT_SUBPRIORITY_LEVEL3);
SYS_INT_VectorPrioritySet(INT_VECTOR_UART4_FAULT, INT_PRIORITY_LEVEL3);
SYS_INT_VectorSubprioritySet(INT_VECTOR_UART4_FAULT, INT_SUBPRIORITY_LEVEL0);
/*
//���W�X�^���ڐݒ�
U4MODEbits.ON = 1; //UART4 �C�l�[�u��
U4MODEbits.PDSEL = 0b00; //�f�[�^��8�r�b�g�A�p���e�B�Ȃ�
U4MODEbits.STSEL = 0; //�X�g�b�v�r�b�gx1��
// U4MODEbits.BRGH = 1; //�n�C�X�s�[�h�{�[���[�g�@�C�l�[�u��
U4MODEbits.UEN = 0; //UARTx Enable bits
//00: UxTX and UxRX pins are enabled and used; UxCTS and UxRTS/UxBCLK pins are controlled
//by corresponding bits in the PORTx register
U4STAbits.URXEN = 1; //���V�[�o�[�C�l�[�u��
U4STAbits.UTXEN = 1; //�g�����X�~�b�^�[�C�l�[�u��
U4STAbits.URXISEL = 0; //00: �o�b�t�@��1������M�����犄���݃t���O������
//Interrupt flag bit is asserted while receive buffer is not empty (i.e., has at least 1 data character)
U4BRG = (unsigned int)(100000000/16/9600 - 1); //baud rate: 9600bps //U4BRG = Fosc/BRGH/Baud Rate -1
*/
/* Initialize RX interrupt */
PLIB_INT_SourceEnable(INT_ID_0, INT_SOURCE_USART_4_RECEIVE); //UART4��M��������
// IEC5bits.U4RXIE = 1; //UART4��M�������� //IEC5<11>
/* Initialize System Services */
SYS_INT_Initialize();
/*** TMR Service Initialization Code ***/
sysObj.sysTmr = SYS_TMR_Initialize(SYS_TMR_INDEX_0, (const SYS_MODULE_INIT * const)&sysTmrInitData);
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_interrupt.c
//---------------------------------------------------------------------------------------
/*******************************************************************************
System Interrupts File
File Name:
system_int.c
Summary:
Raw ISR definitions.
Description:
This file contains a definitions of the raw ISRs required to support the
interrupt sub-system.
Summary:
This file contains source code for the interrupt vector functions in the
system.
Description:
This file contains source code for the interrupt vector functions in the
system. It implements the system and part specific vector "stub" functions
from which the individual "Tasks" functions are called for any modules
executing interrupt-driven in the MPLAB Harmony system.
Remarks:
This file requires access to the systemObjects global data structure that
contains the object handles to all MPLAB Harmony module objects executing
interrupt-driven in the system. These handles are passed into the individual
module "Tasks" functions to identify the instance of the module to maintain.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2011-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <xc.h>
#include <sys/attribs.h>
#include "app.h"
#include "system_definitions.h"
char data;
int Flag = 0; //�ǂݍ��݊������o�t���O
// *****************************************************************************
// *****************************************************************************
// Section: System Interrupt Vector Functions
// *****************************************************************************
// *****************************************************************************
void __ISR(_TIMER_9_VECTOR, ipl1) _IntHandlerDrvTmrInstance0(void)
{
DRV_TMR_Tasks_ISR(sysObj.drvTmr0);
}
void __ISR(_UART4_TX_VECTOR, ipl3) _IntHandlerDrvUsartTransmitInstance0(void)
{
DRV_USART_TasksTransmit(sysObj.drvUsart0);
DRV_USART_TasksError(sysObj.drvUsart0);
}
void __ISR(_UART4_RX_VECTOR, ipl1) _IntHandlerDrvUsartReceiveInstance0(void)
{
/* TODO: Add code to process interrupt here */
if (PLIB_USART_ReceiverDataIsAvailable(USART_ID_4)) //��M�f�[�^�L�̏ꍇ
// if(U4STAbits.URXDA == 1) //��M�f�[�^�L�̏ꍇ //Receive buffer has data, at least one more character can be read
{
data = PLIB_USART_ReceiverByteReceive(USART_ID_4); //��M�f�[�^�ǂݍ���
//data = U4RXREG; //��M�o�b�t�@�ǂݍ���
// Flag = 1;
SendData();
}
/* Clear pending interrupt */
PLIB_INT_SourceFlagClear(INT_ID_0, INT_SOURCE_USART_4_RECEIVE);
//IFS5bits.U4RXIF = 0; //RX�����݃t���O�N���A
}
void __ISR(_UART4_FAULT_VECTOR, ipl3) _IntHandlerDrvUsartErrorInstance0(void)
{
SYS_ASSERT(false, "USART Driver Instance 0 Error");
}
/*******************************************************************************
End of File
*/
//�ȉ��A1lcd_lib_C32.h
//----------------------------------------------------------------------------
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//XC32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
#define lcd_Clock 200000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATAbits.LATA9 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATAbits.LATA10 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//�ȉ��A1lcd_lib_C32.c
//----------------------------------------------------------------------------------
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(lcd_Clock/20000000)*usec;
do //�����F�@at�@200MH (Clock=200000000)
{ //delay_us(1000)��1000.4��sec�A�@delay_us(100)��100.6��sec�Adelay_us(10)��10.5��sec�Adelay_us(1)��1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
| |
|
PC��� |
�t�����
��i�F�@��M������
���i�F�@�ԐM������ |
| �@ |
�R���{�{�b�N�X��"Japan"��I�����đ��M�� "Tokyo"����M�����ꍇ |
 |
 |
| �A |
Japan
America
U.K.
France
I am fine
���@�������M����
����
|
 |
 |
�@
�@�i�R�j������̑���M�@�i�t���[����Ȃ��APIC���FLCD�t�A�@�����݂Ȃ��A�^�C���A�E�g����A�n�C�p�[�^�[�~�i�� - PIC�ԁj
�@getc()�́A�P�o�C�g�̎�M�f�[�^���擾����܂ʼni���ɑ҂��Â��܂��B�@�m�C�Y����UART����M�Ɏ��s����ƃv���O������
����getc()�̂Ƃ���Œ�~���ăt���[�Y�̏�ԂƂȂ��Ă��܂��܂��B���������邽�߂̑�Ƃ��Ă悭�g����A���鎞��
�i�^�C���A�E�g���ԁj�o���Ă��f�[�^���擾�ł��Ȃ��ꍇ�͎擾�𒆎~���ĕʂ̏����Ɉڂ�h�^�C���A�E�g�����h�̗���Љ�
���܂��B
�@������i�d�l��
�@�@PC��COM�|�[�g��PIC���Ȃ��@Windows���n�C�p�[�^�[�~�i���̉�ʂɈȉ���\������B
�@�@�E�@PC�̃L�[�{�[�h����L�[�C�������������G�R�[�o�b�N�ɂ��@�ȉ��̂悤�ɕ\������
�@�@�@�@�i��j�@�@�R�ԖڂɃL�[�C������������D�̏ꍇ�@�c�c�@�@buf[2]=D
�@�@�E�@�G���^�[�L�[�������ꂽ�ꍇ�́A����܂łɃL�[�C���������������ׂĂP�s�ɘA�����ĕ\������邱��
�@�@�@�@�i��j�@�@�hA�h�@�hB�h�@�hC�h�@�hD�h�@�hE�h�@�ƃL�[�C���������ƂɃG���^�[�L�[���L�[�C�����ꂽ�ꍇ�@�@�c�c�@ABCDE
�@�@�E�@�L�[�C�����鎞�ԊԊu���R�b�ȏ�o������^�C���A�E�g�����������Ȃ� �n�C�p�[�^�[�~�i����ʂɁ@�hTimeout !
�@�@�@�@Too Slow !�h�ƕ\������B�����ĉ��s��hType Please !!�h�ƕ\�����Ă͂��߂̃L�[���̓��[�h�Ɉڂ�
�@������i��H�}���@�y�с@������i�O�ρ��́@��L�i�Q�j�ƑS�������ł��B
�@���v���O�����၄
//�@PC�̃n�C�p�[�^�[�~�i���@���@RS232C�@���@PIC18F452�@�{�@LCD
/*
PC���j�^�o��
Type Please !!
buf[0]=a
buf[1]=b
buf[2]=c
buf[3]=d
abcd
Type Please !!
buf[0]=a
buf[1]=b // 3�b�ȏ�o��
Timeout ! Too slow !
Type Please !!
*/
#include "18f452.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7,stream=PC) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#define timeout_Time 3000 // �^�C���A�E�g���Ԃ̐ݒ�@�F�@�P��msec
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
#define StartMode 0 //������̍ŏ��̕������L�[�C�����郂�[�h
#define NomalMode 1 //������̂Q�Ԗڈȍ~���L�[�C�����郂�[�h
#define TimeoutMode 2 //�^�C���A�E�g�̃��[�h
#include <1lcd_lib.c>
char buf[20];
int i =0;
char Status = StartMode;
char timed_getc()
{
int32 timeout;
char returnValue;
timeout = 0;
while(!kbhit()&&(++timeout<timeout_Time*100)) // �^�C���A�E�g���ԓ��Ƀf�[�^����M���Ȃ����while()���[�v����
//�^�C���A�E�g���� �� 3(10��sec�@�~�@100�@�~�@3000�jsec
delay_us(10); // 10��sec
if(kbhit()) //�^�C���A�E�g���ԓ��Ƀf�[�^���擾�����ꍇ�̓f�[�^���擾���A���̃f�[�^��Ԃ�
returnValue = getc();
else //�@�^�C���A�E�g���ԓ��Ńf�[�^���擾�ł��Ȃ������ꍇ��NAK��Ԃ�
returnValue = NAK;
return(returnValue);
}
char Monitor(char getValue) //�擾�����f�[�^��PC�̃��j�^�Ɖt���ɕ\������
{
buf[i] = getValue;
if(buf[i] == NAK) //�^�C���A�E�g�̏ꍇ
{
i = 0;
Status = TimeoutMode;
printf("Timeout ! Too slow !\r\n");
}
else if(buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
printf(buf); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
putc('\r');putc('\n');putc('\r');putc('\n'); //�P�s������
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
Status = StartMode;
}
else //���̑��̏ꍇ
{
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
i++;
Status = NomalMode;
}
return Status;
}
main()
{
char value;
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
while(1)
{
printf("\r\nType Please !!\r\n");
while(!kbhit()); //�L�[�C����҂�
do
{
value = timed_getc(); //��M�f�[�^���擾����i�^�C���A�E�g����NAK���Ԃ��Ă���j
Status = Monitor(value); //�f�[�^�̕\���@�y�є���
}while(Status == NomalMode); //�^�C���A�E�g�܂��̓G���^�[�L�[�ȊO�������ꂽ�ꍇ�͎��̃L�[�C����҂�
}
return 0;
}
�����쌋�ʁ�
�@���L�̃n�C�p�[�^�[�~�i���̉�ʂ͈ȉ��̑���������ꍇ�̂��̂ł��B
�@�@�E�@�hType Please !!�h�ƕ\�����ł���@�h1�h�A�h2�h�A�h3�h�A�h4�h�A�h5�h�A�@�h�G���^�[�h�ƊԊu�R�b�ȓ��Ɋe�L�[���L�[�C������
�@�@�E�@�ĂсhType Please !!�h�ƕ\�����ł���@�ha�h�A�h b�h �A�hc�h�ƊԊu�R�b�ȓ��ɃL�[�C������B�hc�h���L�[�C���������ƂR�b
�ȏ�̊ԃL�[�C�����Ȃ��ő҂�
�@�@�E�@�^�C���A�E�g���������@�hTimeout ! Too slow !�h�̕\�����ł�
�@
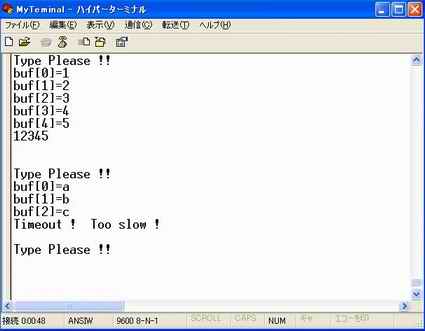
�i�S�j������̑���M�@�i Win32API - PIC�� �@ �t���[����Ȃ��APIC���FLCD�t�A�@�����݂Ȃ��A�^�C���A�E�g�Ȃ��j
�@�����Windows�A�v������Win32API����������COM�|�[�g�𐧌䂵��PIC�ƒʐM��������Љ�܂��BWindows�A�v����
BCB�iBorland�@C++�@Buider Ver.6�j�������č쐬����Ă��܂��B���ACOM�|�[�g����Ɋւ��Ă�BCB��p�̃R���|�[�l���g�A
�y�ъ�������܂���̂ŁA����Win32API���y�э\���̂��g�p���Ă��܂��B�@
�@Windows�A�v�����̐�����PC�� RS232C�V���A���ʐM���Q�Ƃ��Ă��������B
�@������i�d�l��
�@
�@PC��COM�|�[�g��PIC���Ȃ��@����Windows�A�v�����N������B
�@���@PC��
�@�@�E�@Window���̃R���{�{�b�N�X�ɂ��炩���ߑ��M�p�̕�����Ƃ��āhJapan�h�A�hAmerica�h�A�hIraque�h��p�ӂ��Ă����B
�@�@�E�@�}�E�X�ŏ�L�R�̂����ꂩ�̕�����ЂƂ�I������ƕ����P���M�f�[�^�Ƃ��đI�������B
�@�@�E�@���M�{�^�����}�E�X�ŃN���b�N����ƃZ�b�g���ꂽ������COM�Q�|�[�g����9600�������̒ʐM���x�ő��M�����B
�@�@�E�@���M��g�[�^���^�C���A�E�g���ԂP�O�Omsec��PIC����̃f�[�^��҂�
�@�@�E�@PIC����̃f�[�^����M������G�f�B�b�g�{�b�N�X�ɕ\������B
�@���@PIC��
�@�@�E�@PC������RX�[�q�o�R�Ŏ�M�����f�[�^���t���̂P�s�ڂɕ\������B
�@�@�E�@PC������̃f�[�^�ʂ�PC����TX�[�q�o�R�ŕԐM����B
�ԐM�f�[�^�͈ȉ��Ƃ���@
|
PC����̎�M�f�[�^ |
PC�ւ̕ԐM�f�[�^ |
| 1 |
Japan |
Tokyo |
| 2 |
America |
Washinton |
| 3 |
���̑��̃f�[�^ |
Pardon ? |
�@�@�E�@�ԐM�f�[�^���t���̂Q�s�ڂɕ\������B
�@������i��H�}���@�y�с@������i�O�ρ��́@��L�i�Q�j�ƑS�������ł��B
�@�@�@�@�@�@�@�@�@�@
�@���v���O������@ PIC�� ���@��CCS�ҁ�
/*
------------------------------------------------------------------
< �\��>
�@PC�iC++ Builder:Win32 API)�@���@RS232C�@�@���@PIC18F452�@�{�@16�����L�����N�^�t��
--------------------------------------------------------------------
�@�@�@�@�@ PC���@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC���@
�@���M�f�[�^�@Japan �� ��M�f�[�^�@Japan
�@��M�f�[�^�@Tokyo �� ���M�f�[�^�@Tokyo
�@���M�f�[�^�@America �� ��M�f�[�^�@America
�@��M�f�[�^�@Washinton �� ���M�f�[�^�@Washinton
�@���M�f�[�^�@Iraque �� ��M�f�[�^�@Iraque
�@��M�f�[�^�@pardon�@? �� ���M�f�[�^�@pardon ?
*/
#include "18f452.h"
#include "string.h"
#use delay(clock=40000000) // 40MH���i�V�X�e���N���b�N���g���j��10MH���i�O�����U�q���g���j�~4�iPLL�{���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int i = 0;
char buf[20];
char Japan[] = "Japan";
char America[] = "America";
char Tokyo[] = "Tokyo";
char Washinton[] = "Washinton";
char Pardon[] = "Pardon ?";
char* str;
void LCD()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Japan) == 0)str = Tokyo;
else if(strcmp(buf,America) == 0) str = Washinton;
else str = Pardon;
printf(str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂P�s�ڂɈꊇ�\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
printf(lcd_data,str); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main(){
set_tris_c(0b10010000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Open COM port !!");
delay_ms(1000); //
while(1)
{
LCD();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
/*
*************************************************************************
*************************************************************************
���@�v���O������@�@�@Windows���@��
���̃v���O�����́@C++ Buider Ver.6 �ł�����Ă��܂��B
�@�v���O�����̃\�[�X�R�[�h
*************************************************************************
*************************************************************************
*/
#include <vcl.h>
#include <stdio.h>
#pragma hdrstop
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
HANDLE hPort; // �|�[�g�n���h��
DCB dcb; // DCB�\����
COMMTIMEOUTS timeout; // COMMTIMEOUTS�\����
BOOL Ret; // ���߂�l
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
TransmitComboBox->ItemIndex = 0;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender) //�@�h���M�J�n�h�{�^�����N���b�N�������̏���
{
char* szStr;
// BYTE bSendBuffer[10]; // ���M�f�[�^
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[10]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
// �iCOM2�|�[�g�́j�|�[�g�n���h�����擾����
hPort = CreateFile(
"COM2", //�@�@�|�[�g�̖��O�F �ǂ̃|�[�g���J���̂�
GENERIC_READ|GENERIC_WRITE, //�@�A�N�Z�X���[�h�F�@�ʏ푗��M�Ƃ�����̂œǏ����������w��
0, //�@�@���L���[�h�F�@�ʏ�0�ɐݒ�@�ăI�[�v���֎~
NULL, //�Z�L�����e�B�A�g���r���[�g�F�ʐM�ł͒ʏ�NULL�ɐݒ�@
OPEN_EXISTING, //�@�N���G�C�g�ި��r���[�V�����F�ʏ�COM�|�[�g�͂��łɑ��݂��Ă���̂�OPEN_EXISTING�Ƃ��܂��B
FILE_ATTRIBUTE_NORMAL, //�@�����F�ʐM�̏ꍇ�����͂Ȃ��̂�FILE_ATTRIBUTE_NORMAL�i�����Ȃ��j���w��@
NULL //�@�e���v���[�g�̃n���h���F�@�ʐM�̏ꍇ�W�Ȃ��@�ʏ�NULL���w��
);
if(hPort == INVALID_HANDLE_VALUE) //�n���h���擾�Ɏ��s�����ꍇ
{
MessageBox(NULL , "Port could not open" , "�x��" , MB_OK);
exit(0);
}
Ret = SetupComm( //�ݒ�
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
512, // ��M�o�b�t�@�[�T�C�Y�F�@��M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
512 // �@���M�o�b�t�@�[�T�C�Y�F�@���M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
);
if(Ret == FALSE) //�@���s�����ꍇ
{
MessageBox(NULL , "SetupComm failed" , TEXT("�x��") , MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm( //����
hPort, //�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR
// ���s���鑀��F ��L�͖������̓Ǐ����̒��~�y�ё���M�̃o�b�t�@�[�̃N���A���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL , "PurgeComm failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
dcb.DCBlength = sizeof(DCB); //�@ DCB�̃T�C�Y�F
//�f�[�^
dcb.BaudRate = 9600; // �`�����x�F�@�{�[���[�g��bps�P�ʂŎw��
dcb.fBinary = TRUE; // �o�C�i�����[�h�F �ʏ�TRUE�ɐݒ�
dcb.ByteSize = 8; //�@ �f�[�^�T�C�Y�@�F�@�ʏ�@8 �r�b�g
dcb.fParity = NOPARITY; // �p���e�B�L����ށ@�F�@�p���e�B�Ȃ��̏ꍇ��NOPARITY���w��
// ��p���e�B�̏ꍇ�� ODDPARITY �@��
dcb.StopBits = ONESTOPBIT; // �X�g�b�v�r�b�g�̐��F�@�ʏ�P�r�b�g�� ONESTOPBIT;
//�n�[�h�E�F�A�t���[����
dcb.fOutxCtsFlow = FALSE; // �@CTS�n�[�h�E�F�A�t���[����FCTS������g�p���Ȃ��ꍇ��FLASE���w��
// �@�@�@�@�@�@CTS���������ꍇ��TRUE���w�肵��CTS�M�����Ď����܂��B
dcb.fOutxDsrFlow = FALSE; // DSR�n�[�h�E�F�A�t���[����F�g�p���Ȃ��ꍇ��FALSE���w��
dcb.fDtrControl = DTR_CONTROL_DISABLE;// DTR�L��/�����F�@�����Ȃ�@DTR_CONTROL_DISABLE;ISABLE
dcb.fRtsControl = RTS_CONTROL_DISABLE; // RTS����F�@RTS��������Ȃ��ꍇ��RTS_CONTROL_DISABLE���w��
//�@�@�@�@�@�@�@�@ RTS���������ꍇ��RTS_CONTROL_ENABLE���w��@�@��
// �\�t�g�E�F�A�t���[����
dcb.fOutX = FALSE; // ���M��XON/OFF����̗L���F�@�Ȃ���FLALSE
dcb.fInX = FALSE; // ��M��XON/XOFF����̗L���F�Ȃ���FALSE
dcb.fTXContinueOnXoff = TRUE; // ��M�o�b�t�@�[���t��XOFF��M��̌p�����M�ہF���M��TRUE
dcb.XonLim = 512; // XON��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XoffLim = 512; // XOFF��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XonChar = 0x11; // ���M��XON���� ( ���M�F�r�W�B���� ) �̎w��F
//�@��ʂɁAXON�����Ƃ���11H ( �f�o�C�X����P�FDC1 )���悭�g���܂�
dcb.XoffChar = 0x13; // XOFF�����i���M�s�F�r�W�[�ʍ��j�̎w��F�Ȃ���FALSE
//�@��ʂɁAXOFF�����Ƃ���13H ( �f�o�C�X����3�FDC3 )���悭�g���܂�
//���̑�
dcb.fNull = TRUE; // NULL�o�C�g�̔j���F �j�����遨TRUE
dcb.fAbortOnError = TRUE; // �G���[���̓ǂݏ�������I���F�@�I�����遨TRUE
dcb.fErrorChar = FALSE; // �p���e�B�G���[�������̃L�����N�^�iErrorChar�j�u���F�@�Ȃ���FLALSE
dcb.ErrorChar = 0x00; // �p���e�B�G���[�������̒u���L�����N�^
dcb.EofChar = 0x03; // �f�[�^�I���ʒm�L�����N�^�@�F�@��ʂ�0x03(ETX)���悭�g���܂��B
dcb.EvtChar = 0x02; // �C�x���g�ʒm�L�����N�^ �F�@��ʂ�0x02(STX)���悭�g���܂�
Ret = SetCommState(hPort, &dcb); //SetCommState()���Ƀ|�[�g�n���h�������dcb�\���̂̃A�h���X��������
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL , "SetCommState failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
timeout.ReadIntervalTimeout = 5; // �����Ǎ����̂P����������̃^�C���A�E�g�܂ł̑҂����ԁimsec�j
timeout.ReadTotalTimeoutMultiplier = 0; //�Ǎ��̂P����������̎���
timeout.ReadTotalTimeoutConstant = 100; //�Ǎ��G���[���o�p�̃^�C���A�E�g����
//(��M�g�[�^���^�C���A�E�g) = ReadTotalTimeoutMultiplier * (��M�\��o�C�g��) + ReadTotalTimeoutConstant
timeout.WriteTotalTimeoutMultiplier = 5; //�������݂P����������̃^�C���A�E�g�܂ł̑҂�����
timeout.WriteTotalTimeoutConstant = 100;//�������݃G���[���o�p�̃^�C���A�E�g����
//(���M�g�[�^���^�C���A�E�g) = WriteTotalTimeoutMultiplier * (���M�\��o�C�g��) + WriteTotalTimeoutConstant
Ret = SetCommTimeouts(hPort, &timeout);//SetCommTimeOut()���Ƀ|�[�g�n���h�������COMMTIMEOUTS�\���̂�
//�A�h���X�������܂��B
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"SetCommTimeouts failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
szStr = (TransmitComboBox->Text + "\r" ).c_str(); //�R���{�{�b�N�X����擾����������̍Ō��CR(\r�j��lj�
//�@�@�@�@�@�@�@���@��M���ɑ��M�f�[�^�̏I�[�ł��邱�Ƃ�ʒm
nNumberOfBytesToWrite = strlen(szStr);
Ret = WriteFile( //�f�[�^�̑��M
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
szStr,//�@���M�f�[�^�̃|�C���^���w��
nNumberOfBytesToWrite, // �@���M����f�[�^�̃o�C�g�����w��
&nNumberOfBytesWritten, // ���ۂɑ��M���ꂽ�o�C�g�����i�[�����|�C���^���w��
NULL // �@�@�ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��@�@�@�@
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"WriteFile failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = ReadFile( // �f�[�^�̎�M
hPort, // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
&bReceiveBuffer, // ��M�o�b�t�@�[�̃|�C���^���w��F�@��M�f�[�^�������Ɋi�[����܂��B
10, //�@��M����o�C�g�����w��F�@�����Ŏw�肷��o�C�g������M���邩�܂��̓^�C���A�E�g���Ԃ�����܂�
// ReadFile()���́i�@getc()�̂悤�Ɂ@�j�҂��܂�
&nNumberOfBytesRead, // ���ۂɎ�M�����o�C�g�����i�[�����DWORD�l�̃|�C���^���w��
NULL // �ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
Application->MessageBox("�f�[�^�̓ǂݏo���ŃG���[������", "�x��", MB_OK ) ;
CloseHandle(hPort);
exit(0);
}
bReceiveBuffer[nNumberOfBytesRead] = '\0';
szStr = &bReceiveBuffer[0];
ReceiveEdit -> Text = szStr; //��M�f�[�^���G�f�B�b�g�{�b�N�X�ɕ\��
CloseHandle(
hPort // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
);
}
//---------------------------------------------------------------------------
�����쌋�ʁ�
�@�@�@�@PC�̃R���{�{�b�N�X����@���M�����Ƃ��āhJapan�h��I�����܂��B���Ɂh���M�J�n�{�^���h��
�@�@�@�@�N���b�N�����PIC���ɁhJapan�h�����M����܂��B���̌��ʁAPIC������hTokyo�h���ԐM�����
�@�@�@�@���܂��B���̕ԐM�f�[�^�hTokyo�h���G�f�B�b�g�{�b�N�X�ɕ\�����ꂽ����Windows��ʂ��ȉ���
�@�@�@�@�����܂��B����A�t����ʂ̂̂P�s�ڂɂ͎�M�����hJapan�h���A�Q�s�ڂɂ͑��M�����hTokyo�h��
�@�@�@�@�\������܂��B���̎���PIC���t����ʂ̎ʐ^���E���Ɏ����܂�
| ��PC��Windows��ʁ� |
|
��PIC���t����ʁ� |
 |
|
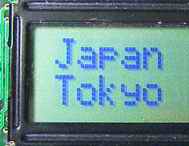 |
�@
�A�@���l�Ɂ@PC�����@�hAmerica�h�𑗐M�������̉摜�ł��B
| ��PC��Windows��ʁ� |
|
��PIC���t����ʁ� |
 |
|
 |
�@�B�@���l�Ɂ@PC�����@�hIraque�h�𑗐M�������̉摜�ł��B
| ��PC��Windows��ʁ� |
|
��PIC���t����ʁ� |
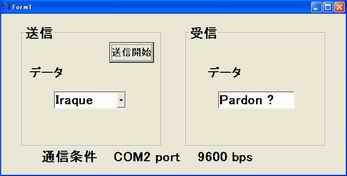 |
|
 |
�@�i�T�j������̑���M�@�i Win32API - PIC�� �t���[���䂠��APIC���FLCD�t�A�����݂Ȃ��A�^�C���A�E�g�Ȃ��j
�@�@RTS/CTS�n�[�h�E�F�A�t���[���䂪����ꍇ��Win32API����������COM�|�[�g��PIC�Ԃ̒ʐM���
�@�Љ�܂��BWindows�A�v����BCB�iBorland�@C++�@Buider Ver.6�j�������č쐬����Ă��܂��B
�@�@���ACOM�|�[�g����Ɋւ��Ă�BCB��p�̃R���|�[�l���g�A�y�ъ�������܂���̂ŁA����Win32API
�@���y�э\���̂��g�p���Ă��܂��BWindows�A�v�����̐�����PC�� RS232C�V���A���ʐM���Q�Ƃ��Ă��������B
�@������i�d�l��
�@PC��COM�|�[�g��PIC���Ȃ��@����Windows�A�v�����N������B
�@���@PC��
�@�@�E�@���M�J�n�{�^���������Ɓ@0�`359�̐������@COM�Q�|�[�g��RX�[�q����9600��������PIC���ɑ��M�����B
�@�@�E�@���M��g�[�^���^�C���A�E�g���ԁ@100msec��PIC����̃f�[�^��҂�
�@�@�E�@PIC����̃f�[�^����M������f�[�^���O���t�Ƃ��ĕ\������B�܂���M�f�[�^�͂R�̃G�f�B�b�g�{�b�N�X��
�@�@�@�@�ȉ��̂悤�ɕ\������B
�@�@�@�@�@�@�@�@�S��M�f�[�^�G�f�B�b�g�{�b�N�X�c�c��M�����S�f�[�^�i������j���P�s�ɂ��ĕ\������B
�@�@�@�@�@�@�A�@���M�f�[�^X�G�f�B�b�g�{�b�N�X �c�c��M�����S�f�[�^�i������j�̒����瑗�M�����f�[�^�݂̂�
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �����Ƃ��ēE�o���āA�G�R�[�o�b�N�l�Ƃ��ĕ\������B
�@�@�@�@�@�@�B�@��M�f�[�^Y�G�f�B�b�g�{�b�N�X�@�c�c�S��M�f�[�^�i������j�̒�����PIC���Ōv�Z����Y = Sin X��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�l�������Ƃ��Ē��o���ĕ\������B
���A���̂P�O�Omsec��̃f�[�^�͉��s���ē��l�ɕ\�����邱��
�@�E�@CTS/RTS�n�[�h�E�F�A�t���[����������Ȃ����ƁB
�@�E�@��M�f�[�^�𐔒l������ꍇ�͗�O�����������Ȃ����ƁB�܂���O�����������������\�����邱��
�@���@PIC��
�@�E�@�ԐM�f�[�^�́@�ȉ��̏��Ԃő��M����
�@�@�@�@�@�@�@�@In=�̂��ƂɎ�M�f�[�^
�@�@�@�@�@�@�A�@���䕶��ESC(0x1b)�~�Q
�@�@�@�@�@�@�B�@Out=�̂��Ƃ�sin( 2 �~�@3.1416 �~�@�i ��M�f�[�^ �j�@���@ 360�@ �j�̌v�Z�l�i���������j
�@�@�@�@�@�@�C�@�Ō�ɐ��䕶��CR�i0x0D�j
�@ �@�@�@�@�@�@�@�@�i��j�@�@�@In=261 ESC ESC Out=-0.987690 CR�@�@�@
�@�@�E�@�t���ɂ͈ȉ���\������
�@�@�@�@�@�@�@�@�P�s�ڂɂ́@In=�̂��ƂɎ�M�f�[�^
�@�@�@�@�@�@�A�@�Q�s�ڂɂ�Out=�̌�ɏ�L�̌v�Z�l�i���������j
�@�@
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@PIC�P�WF�S�T�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
|
 |
|
�@�@�@�@�@�@�@�@�@
�@���v���O�����၄ ��PIC�����@�@�@��CCS�ҁ�
/*
------------------------------------------------------------------
< �\��>
�@PC�iC++ Builder:Win32 API)�@���@RS232C�@�@���@PIC18F452�@�{�@16�����L�����N�^�t��
�@�������̈���x��PC�����M�@���@PIC���� sin x ���v�Z�@�@���@�v�Z���ʂ���M�������Ƌ��ɕԐM
*/
#include "18f452.h"
#include "stdlib.h"
#include "math.h"
#use delay(clock=40000000) // 10MH���i�V�X�e���N���b�N���g���j
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#define ESC 0x1b // Escape
#define CR 0x0D // Carridge Return \r
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int i = 0;
char buf[20];
long int DataIn;
float fDataIn;
float DataOut;
char SendData[30];
char* str;
void LCD()
{
buf[i] = getc();
output_high(PIN_C2);//PC������̑��M���֎~�F�@PIC���\�t�g�F1(High) ��RC2�s���ɃZ�b�g
//���@MAX232��T2in�o�͓d���i=PIC��RC2�s���j�F5V
//���@PIC����RTS�M���iMAX232��T2out7�ԃs��)�F-8V�@
//���@COM�|�[�gCTS(8�ԃs���j; -8V
//���@Comstat.fCtsHold�i���M�֎~�j = true
if( buf[i] == '\r') // �@\r: ��M�f�[�^�̍Ō�̕���
{
buf[i] = '\0';
fDataIn = atof(buf); // fDataIn = (float)atoi(buf) --> NG
DataOut = sin ( 2* 3.1416 * (fDataIn / 360));
sprintf(SendData,"In=%s%c%cOut=%f%c",buf,ESC,ESC,DataOut,CR);
//���M������ �F ���M�f�[�^buf,DataOut�̑O��Ƀf�[�^���o�p�̐��䕶����}��
str = &SendData[0];
//�@CTS/RTS�t���[����
do
{
}while(input(PIN_C0)!= 0);//PC����RTS�i���M���j���o��܂ő҂�
//�@PIC���\�t�g�F0(Low) �����o
//�@�@�@��MAX232�o�͓d���i=PIC��RC0�s���j�F0V
// ��PIC��CTS�M���iMAX232����R1in 13�ԃs���j�F10V�@
//�@�@�@�@�@�@�@��PC����COM�|�[�gRTS(7�ԃs���j�o�͓d���F10V
// �@�@�@�@�@�@�@�@�� �� EscapeCommFunction�̈�����SETRTS�ɃZ�b�g
printf("%s",str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"In=%s",buf); //�@��M�����������t���̂P�s�ڂɕ\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
printf(lcd_data,"Out=%f",DataOut); //�@���M�����������t���̂Q�s�ڂɕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
//CTS/RTS�t���[����
output_low(PIN_C2);//PC������̑��M�����F�@PIC���\�t�g�F0(Low) ��RC2�s���ɃZ�b�g
//���@MAX232��T2in�o�͓d���i=PIC��RC2�s���j�F0V
//���@PIC����RTS�M���iMAX232��T2out7�ԃs��)�F+8V�@
//���@COM�|�[�gCTS(8�ԃs���j; +8V
//���@Comstat.fCtsHold�i���M�֎~�j = false
//���@���M����
}
main(){
set_tris_c(0b10000001);// �K�{ in = RC7:RX & RC0:CTS out = RC6 :TX & RC2:RTS
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Open COM port !!");
delay_ms(1000);
output_low(PIN_C2);//PC������̑��M������
while(1)
{
LCD();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
/*
*************************************************************************
*************************************************************************
���@�v���O������@�@�@Windows���@��
���̃v���O�����́@C++ Buider Ver.6 �ł�����Ă��܂��B
�@�v���O�����̃\�[�X�R�[�h
*************************************************************************
*************************************************************************
*/
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include <math.h>
#include <stdio.h>
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "MsTimer"
#pragma resource "*.dfm"
#define ESC 0x1b // Escape
#define CR 0x0D // Carridge Return
#define DC1 0x11 // Device Control 1
#define DC2 0x12 // Device Control 2
TForm1 *Form1;
const double PAI = 3.1416;
int gLeft = 30; //�O���t�̍���
int gTop = 20; //�O���t�̏㕝
int gWidth = 360; //�O���t�̉���
int gHeight = 400; //�O���t�̏c��
BOOL ColorFlag = 0;
int nErrorIn = 0, //�����ɕϊ��ł��Ȃ���M�f�[�^In����M�����@
nErrorOut =0; //���������ɕϊ��ł��Ȃ���M�f�[�^Out����M������
int Angle =0; //���M�f�[�^�F 0�`355�܂ł̐���
HANDLE hPort; // �|�[�g�n���h��
DCB dcb; // DCB�\����
COMMTIMEOUTS timeout; // COMMTIMEOUTS�\����
BOOL Ret; // ���߂�l
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
MsTimer1->Enabled = false;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::FormPaint(TObject *Sender)
{
LinRePaint();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender) //�h���M�J�n�{�^���h�����������̏���
{
char* szStr;
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[20]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
// �iCOM2�|�[�g�́j�|�[�g�n���h�����擾����
hPort = CreateFile(
"COM2", //�@�@�|�[�g�̖��O�F �ǂ̃|�[�g���J���̂�
GENERIC_READ|GENERIC_WRITE, //�@�A�N�Z�X���[�h�F�@�ʏ푗��M�Ƃ�����̂œǏ����������w��
0, //�@�@���L���[�h�F�@�ʏ�0�ɐݒ�@�ăI�[�v���֎~
NULL, //�Z�L�����e�B�A�g���r���[�g�F�ʐM�ł͒ʏ�NULL�ɐݒ�@
OPEN_EXISTING, //�@�N���G�C�g�ި��r���[�V�����F�ʏ�COM�|�[�g�͂��łɑ��݂��Ă���̂�OPEN_EXISTING�Ƃ��܂��B
FILE_ATTRIBUTE_NORMAL, //�@�����F�ʐM�̏ꍇ�����͂Ȃ��̂�FILE_ATTRIBUTE_NORMAL�i�����Ȃ��j���w��@
NULL //�@�e���v���[�g�̃n���h���F�@�ʐM�̏ꍇ�W�Ȃ��@�ʏ�NULL���w��
);
if(hPort == INVALID_HANDLE_VALUE) //�n���h���擾�Ɏ��s�����ꍇ
{
MessageBox(NULL , "Port could not open" , "�x��" , MB_OK);
exit(0);
}
Ret = SetupComm( //�ݒ�
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
512, // ��M�o�b�t�@�[�T�C�Y�F�@��M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
512 // �@���M�o�b�t�@�[�T�C�Y�F�@���M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
);
if(Ret == FALSE) //�@���s�����ꍇ
{
MessageBox(NULL , "SetupComm failed" , TEXT("�x��") , MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm( //����
hPort, //�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR
// ���s���鑀��F ��L�͖������̓Ǐ����̒��~�y�ё���M�̃o�b�t�@�[�̃N���A���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL , "PurgeComm failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
dcb.DCBlength = sizeof(DCB); //�@ DCB�̃T�C�Y�F
//�f�[�^
dcb.BaudRate = 9600; // �`�����x�F�@�{�[���[�g��bps�P�ʂŎw��
dcb.fBinary = TRUE; // �o�C�i�����[�h�F �ʏ�TRUE�ɐݒ�
dcb.ByteSize = 8; //�@ �f�[�^�T�C�Y�@�F�@�ʏ�@8 �r�b�g
dcb.fParity = NOPARITY; // �p���e�B�L����ށ@�F�@�p���e�B�Ȃ��̏ꍇ��NOPARITY���w��
// ��p���e�B�̏ꍇ�� ODDPARITY �@��
dcb.StopBits = ONESTOPBIT; // �X�g�b�v�r�b�g�̐��F�@�ʏ�P�r�b�g�� ONESTOPBIT;
// CTS/RTS �n�[�h�E�F�A�t���[����
//CTS/RTS�t���[������{
dcb.fOutxCtsFlow = true; // �@CTS�n�[�h�E�F�A�t���[����FCTS������g�p���Ȃ��ꍇ��FLASE���w��
// �@�@�@�@�@�@CTS���������ꍇ��TRUE���w�肵��CTS�M�����Ď����܂��B
dcb.fOutxDsrFlow = FALSE; // DSR�n�[�h�E�F�A�t���[����F�g�p���Ȃ��ꍇ��FALSE���w��
dcb.fDtrControl = DTR_CONTROL_DISABLE;// DTR�L��/�����F�@�����Ȃ�@DTR_CONTROL_DISABLE;ISABLE
//CTS/RTS�t���[������{
dcb.fRtsControl = RTS_CONTROL_ENABLE; // RTS����F�@RTS��������Ȃ��ꍇ��RTS_CONTROL_DISABLE���w��
//�@�@�@�@�@�@�@�@ RTS���������ꍇ��RTS_CONTROL_ENABLE���w��
// �\�t�g�E�F�A�t���[����
dcb.fOutX = FALSE; // ���M��XON/OFF����̗L���F�@�Ȃ���FLALSE
dcb.fInX = FALSE; // ��M��XON/XOFF����̗L���F�Ȃ���FALSE
dcb.fTXContinueOnXoff = TRUE; // ��M�o�b�t�@�[���t��XOFF��M��̌p�����M�ہF���M��TRUE
dcb.XonLim = 512; // XON��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XoffLim = 512; // XOFF��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XonChar = 0x11; // ���M��XON���� ( ���M�F�r�W�B���� ) �̎w��F
//�@��ʂɁAXON�����Ƃ���11H ( �f�o�C�X����P�FDC1 )���悭�g���܂�
dcb.XoffChar = 0x13; // XOFF�����i���M�s�F�r�W�[�ʍ��j�̎w��F�Ȃ���FALSE
//�@��ʂɁAXOFF�����Ƃ���13H ( �f�o�C�X����3�FDC3 )���悭�g���܂�
//���̑�
dcb.fNull = TRUE; // NULL�o�C�g�̔j���F �j�����遨TRUE
dcb.fAbortOnError = TRUE; // �G���[���̓ǂݏ�������I���F�@�I�����遨TRUE
dcb.fErrorChar = FALSE; // �p���e�B�G���[�������̃L�����N�^�iErrorChar�j�u���F�@�Ȃ���FLALSE
dcb.ErrorChar = 0x00; // �p���e�B�G���[�������̒u���L�����N�^
dcb.EofChar = 0x03; // �f�[�^�I���ʒm�L�����N�^�@�F�@��ʂ�0x03(ETX)���悭�g���܂��B
dcb.EvtChar = 0x02; // �C�x���g�ʒm�L�����N�^ �F�@��ʂ�0x02(STX)���悭�g���܂�
Ret = SetCommState(hPort, &dcb); //SetCommState()���Ƀ|�[�g�n���h�������dcb�\���̂̃A�h���X��������
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL , "SetCommState failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
timeout.ReadIntervalTimeout = 5; // �����Ǎ����̂P����������̃^�C���A�E�g�܂ł̑҂����ԁimsec�j
timeout.ReadTotalTimeoutMultiplier = 0; //�Ǎ��̂P����������̎���
timeout.ReadTotalTimeoutConstant = 100; //�Ǎ��G���[���o�p�̃^�C���A�E�g����
//(��M�g�[�^���^�C���A�E�g) = ReadTotalTimeoutMultiplier * (��M�\��o�C�g��) + ReadTotalTimeoutConstant
timeout.WriteTotalTimeoutMultiplier = 5; //�������݂P����������̃^�C���A�E�g�܂ł̑҂�����
timeout.WriteTotalTimeoutConstant = 100;//�������݃G���[���o�p�̃^�C���A�E�g����
//(���M�g�[�^���^�C���A�E�g) = WriteTotalTimeoutMultiplier * (���M�\��o�C�g��) + WriteTotalTimeoutConstant
Ret = SetCommTimeouts(hPort, &timeout);//SetCommTimeOut()���Ƀ|�[�g�n���h�������COMMTIMEOUTS�\���̂�
//�A�h���X�������܂��B
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"SetCommTimeouts failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
MsTimer1->Enabled = true;
Canvas->Pen->Color = clRed;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::MsTimer1Timer(TObject *Sender) //100msec�@�C���^�[�o���^�C�}���쎞
{
char SendData[10]; // ���M�f�[�^
char* lpszStr; //������̃|�C���^
AnsiString strReceive,str;
int InData;
int nOffset;// �擪�A�h���X���猟�o������܂ł̃I�t�Z�b�g�i�����j
double OutData; //��M�f�[�^�FPIC���v�Z����sin(x)�̒l�i���������j
int x,y;
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[30]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
COMSTAT Comstat; // �ʐM�f�o�C�X���\����
DWORD dwErrorMask; // �G���[�R�[�h�����ϐ�
sprintf(SendData,"%d\r",Angle); // ���M������F�@�I�[�Ƀf�[�^�̏I�[��ʒm����\r��lj�
nNumberOfBytesToWrite = strlen(SendData); //���M�f�[�^�̒����v�Z
//CTS/RTS�t���[����
//���M�֎~�����������܂ő҂i���M�����o��܂ő҂j
do
{
ClearCommError( // �|�[�g�̏�Ԃ��擾���ăG���[���N���A����
hPort , // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
&dwErrorMask ,//���L�̃G���[�R�[�h�̃|�C���^���擾���G���[�̔���
// CD_BREAK�i�t���[�~���O�G���[�j�A
// CE_RXPARITY�i�p���e�B�G���[�j�A
// CE_RXOVER�i���̓o�b�t�@�[�I�[�o�[�t���[�j��
&Comstat//COMSTAT�\���̂ւ̃|�C���^���擾
// Comstat.cbOutQue ���M�o�b�t�@�[�̒��Ɏc���Ă���f�[�^��
);
Application->ProcessMessages();
}while( Comstat.fCtsHold == true ); // COM�|�[�g��CTS��+8V�ɂȂ�܂ő҂�
// Comstat.fCtsHold�i���M�֎~�j != true�@
// Comstat.fCtsHold�i���M�֎~�j = false
// ���@COM�|�[�gCTS(8�ԃs���j; +8V
// ���@PIC����RTS�M���iMAX232��T2out7�ԃs��)�F+8V�@
// �@���@MAX232��T2in�o�͓d���i=PIC��RC2�s���j�F0V
// ���@PIC���\�t�g�F0(Low) ��RC2�s���ɃZ�b�g
Ret = WriteFile( //�f�[�^�̑��M
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
SendData,//�@���M�f�[�^�̃|�C���^���w��
nNumberOfBytesToWrite, // �@���M����f�[�^�̃o�C�g�����w��
&nNumberOfBytesWritten, // ���ۂɑ��M���ꂽ�o�C�g�����i�[�����|�C���^���w��
NULL // �@�@�ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��@�@�@�@
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"WriteFile failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
//CTS/RTS�t���[����
// �t���[����W�̐M���𑗐M
//RTS�i���M���j�M����PIC���ɑ���B�@
// �� EscapeCommFunction�̈�����SETRTS�ɃZ�b�g
// ��PC����COM�|�[�gRTS(7�ԃs���j�o�͓d���F10V
// ��PIC��CTS�M���iMAX232����R1in 13�ԃs���j�F10V�@
// ���@MAX232�o�͓d���i=PIC��RC0�s���j�F0V
// ���@PIC���\�t�g�F0(Low) �����o
Ret = EscapeCommFunction(
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
SETRTS // ��M�\�ł��邱�Ƃ葤�Ɏ����FRTS���A�N�e�B�u�ɂ��遨SETRTS
//�@�@�@�@�@�@�i�Q�l�j RTS���A�N�e�B�u�ɂ��遨CLRRTS�@
);
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL,"EscapeCommFunction failed.\n","�x��",MB_OK);
CloseHandle(hPort);
exit(0);
}
Sleep(40); //40msec �E�F�C�g
Ret = ReadFile( // �f�[�^�̎�M
hPort, // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
&bReceiveBuffer, // ��M�o�b�t�@�[�̃|�C���^���w��F�@��M�f�[�^�������Ɋi�[����܂��B
sizeof(bReceiveBuffer), //�@��M����o�C�g�����w��F�@�����Ŏw�肷��o�C�g������M���邩�܂��̓^�C���A�E�g���Ԃ�����܂�
// ReadFile()���́i�@getc()�̂悤�Ɂ@�j�҂��܂�
&nNumberOfBytesRead, // ���ۂɎ�M�����o�C�g�����i�[�����DWORD�l�̃|�C���^���w��
NULL // �ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
Application->MessageBox("�f�[�^�̓ǂݏo���ŃG���[������", "�x��", MB_OK ) ;
CloseHandle(hPort);
exit(0);
}
//CTS/RTS�t���[����
EscapeCommFunction(
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
CLRRTS // ��M�\�ł��邱�Ƃ葤�Ɏ����FRTS���A�N�e�B�u�ɂ��遨SETRTS
//�@�@�@�@�@�@�i�Q�l�j RTS���A�N�e�B�u�ɂ��遨CLRRTS�@
);
bReceiveBuffer[nNumberOfBytesRead] = '\0'; //��M�f�[�^�̍Ō����\0��lj���������
lpszStr = &bReceiveBuffer[0]; //��M�f�[�^�̐擪�A�h���X����|�C���^�ɑ��
strReceive =(AnsiString)lpszStr;//C����̕������AnsiString������ɃL���X�g�ŕϊ�
nOffset = AnsiPos("In=",strReceive);//"In="�̂���ʒu�i�I�t�Z�b�g�o�C�g�j���o�@���̏ꍇ�͂P�ŌŒ�
lpszStr = &bReceiveBuffer[0] + nOffset +2; //��M�f�[�^�̐擪�A�h���X����|�C���^�ɑ��
str =(AnsiString)lpszStr;//C����̕������AnsiString������ɃL���X�g�ŕϊ�
str = str.SubString(1,3); //"In="�̂��Ƃ̂R������E�o
str = str.Trim();//���䕶���iESC�j������ꍇ�͂�����폜
try //��O����
{
InData = str.ToInt();//�����ɕϊ�
}
catch (EConvertError &e)
// catch (...)
{
nErrorIn++;
InData = 400;
}
nOffset = AnsiPos("Out=",strReceive);//"Out="�̂���ʒu�i�I�t�Z�b�g�o�C�g�j���o�@InData�̒l�ɂ���ĕω�
lpszStr = &bReceiveBuffer[0] + nOffset + 3; //��M�f�[�^�̐擪�A�h���X����|�C���^�ɑ��
str =(AnsiString)lpszStr;//C����̕������AnsiString������ɃL���X�g�ŕϊ�
str = str.SubString(1,9); //"Out="�̂��Ƃ�6������E�o
str = str.Trim();//���䕶���iESC CR�j������ꍇ�͂�����폜
try //��O����
{
OutData = str.ToDouble();//���������ɕϊ�
}
catch (EConvertError &e)
// catch (...)
{
nErrorOut++;
OutData = 1.2;
}
RichEdit1->SelText = strReceive; //�S��M�f�[�^��\��
RichEdit1->SelText = "";
str.sprintf("%d",InData); //���M�f�[�^X�i�G�R�[�o�b�N�l�j��\��
RichEditX->SelText = str;
RichEditX->SelText = "\n";
str.sprintf("%f",OutData); // ��M�f�[�^�iPIC���v�Z�����l�j��\��
RichEditY->SelText = str;
RichEditY->SelText = "\n";
Memo1->Text = str.sprintf("%d",nErrorIn);
Memo2->Text = str.sprintf("%d",nErrorOut);
x = InData;
y = (int)( -gHeight/2*OutData );
if(ColorFlag == 0)
{
Canvas->Pixels[x + gLeft][y + gHeight/2 + gTop] = clRed;
Canvas->Pixels[x+1 + gLeft][y + gHeight/2 + gTop] = clRed;
Canvas->Pixels[x-1 + gLeft][y + gHeight/2 + gTop] = clRed;
Canvas->Pixels[x + gLeft][y+1 + gHeight/2 + gTop] = clRed;
Canvas->Pixels[x + gLeft][y-1 + gHeight/2 + gTop] = clRed;
}
else
{
Canvas->Pixels[x + gLeft][y + gHeight/2 + gTop] = clBlue;
Canvas->Pixels[x+1 + gLeft][y + gHeight/2 + gTop] = clBlue;
Canvas->Pixels[x-1 + gLeft][y + gHeight/2 + gTop] = clBlue;
Canvas->Pixels[x + gLeft][y+1 + gHeight/2 + gTop] = clBlue;
Canvas->Pixels[x + gLeft][y-1 + gHeight/2 + gTop] = clBlue;
}
Angle++;
if( Angle >= gWidth )
{
Angle = 0;
if(ColorFlag == 0)ColorFlag = 1 ;
else ColorFlag = 0;
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::LinRePaint()
{
int i,x,y;
Canvas->MoveTo(gLeft,gTop); //�O���t�r���O�g�`��
Canvas->LineTo(gLeft + gWidth,gTop);
Canvas->LineTo(gLeft + gWidth,gTop + gHeight);
Canvas->LineTo(gLeft , gTop + gHeight);
Canvas->LineTo(gLeft,gTop);
for(i=1;i<8;i++) //�O���t���r���`��
{
Canvas->MoveTo(gLeft , gTop + gHeight/8*i);
Canvas->LineTo(gLeft + gWidth ,gTop+ gHeight/8*i);
}
for(i =1; i < 4; i++)
{
Canvas->MoveTo(gLeft + gWidth/4*i,gTop); //�O���t�c�r���`��
Canvas->LineTo(gLeft + gWidth/4*i,gTop + gHeight);
}
Label0->Left =gLeft - 20;
Label0->Top = gTop + gHeight /2;
Labelx -> Left = gLeft + gWidth + 10;
Labelx -> Top = gTop + gHeight /2;
Label360 -> Left = gLeft + gWidth + 10 -50;
Label360 -> Top = gTop + gHeight /2 +10;
Label180 -> Left = gLeft + gWidth + 10 -180 -50;
Label180 -> Top = gTop + gHeight /2 + 10;
Labely -> Left = gLeft -20 ;
Labely -> Top = gTop -20 ;
Label10 -> Left = gLeft -30 ;
Label10 -> Top = gTop ;
Label05 -> Left = gLeft -30;
Label05 -> Top = gTop -20 + 110;
}
//--------------------------------------------------------------------------
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
CloseHandle(
hPort // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
);
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
RichEdit1->Lines->Clear();
RichEditX->Lines-> Clear();
RichEditY->Lines-> Clear();
}
//---------------------------------------------------------------------------
�����쌋�ʁ�
�@�@�E�@�ȉ��̂悤��PC�E�B���h�E��ʂɎ�M�f�[�^���O���t�����܂����B��ʂ�0�`318�܂ł̑��M�f�[�^������ꂽ�����
�@�@�@���̂ł��B���M�f�[�^X��100msec���ɑ����Ă��܂��B
�@�@�E��ʂ͑��M�f�[�^X��0�`359�i�x�j�̒l�ɑ��āAPIC���Ōv�Z����
�@�@�@�@�@�@�@�@�@�@�@�@Y��sin( 2 �~�@3.1416 �~�@�i ���M�f�[�^ �j�@���@ 360�@ �j
�@�@�@����M���ăO���t�ɂ���悤�ɂȂ��Ă��܂��B
�@�@�@�@���AY�͑S��M�f�[�^�̒��ɕ�����Ƃ��đ��M����Ă��܂��B
�@�@�EX�i�����j�AY�i���������j�̒l�͑S��M�f�[�^�i������j����E�o����Ă��܂��B
�@�@�E��M�G���[�vX�i�����j�AY�i���������j�ɂ͎�M�f�[�^�i������j�𐔒l������ۂɔ���������O�����̗v���\��
�@�@�@�����悤�ɂȂ��Ă��܂��B
�@�@
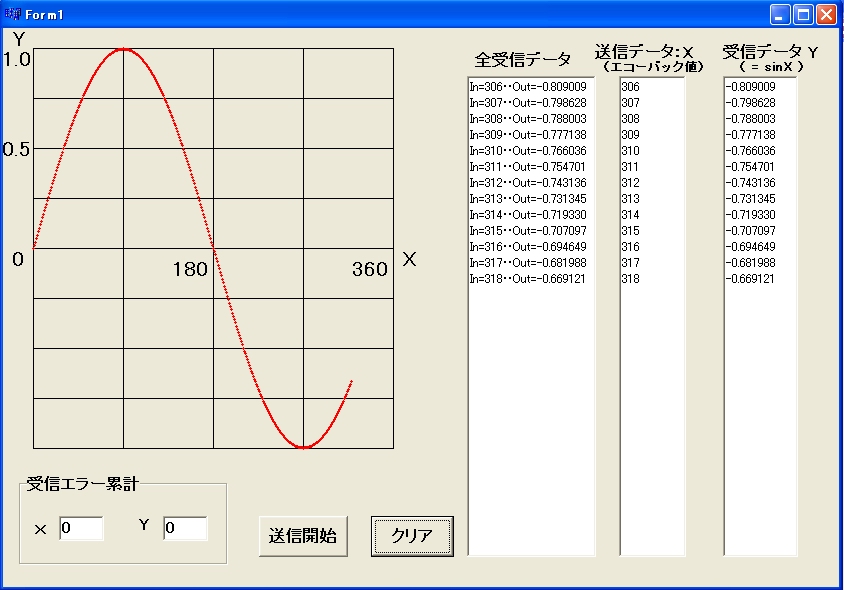
�@�@�E�t����ʂ������܂��B�P�s�ڂ���M�f�[�^�łQ�s�ڂ��v�Z�i���ʁj�l�ł��B
�@�@�@�@
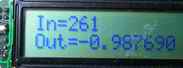
�i�U�j������̑���M�@�i�@�@�@Win32API�@�@�|�@PIC�ԁ@�@�}���`�X���b�h�@��M�X���b�h�F ��C�x���g����^�@�j�@�@�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��CCS�ҁ�
�@�@�i�S�j�A�i�T�j�ł�PC���œ������Ƃ��ď������ރ^�C�~���O��PIC������̓Ǎ������������Ȃ��Ă��܂��B�A�v���P�[�V������
�@����Ă�PC����PIC�������œ��삵�Ȃ���Ȃ�Ȃ����̂�����܂��B�ȉ��ɃX���b�h��������PC���APIC����
�@����̗���Љ�܂��B�i��PC�̃X���b�h�v���O�����j
������i�̎d�l��
�@���@PC��
�@�@�@�E���C���X���b�h�����M�X���b�h�����C�x���g����͂����Ȃ킸�A�펞���[�v��PIC������̑��M�f�[�^���Ď�����B
�@�@�@�EPIC������f�[�^����M������A���₩�Ƀ��C���E�B���h�E�i���C���X���b�h�j�́hPIC����̎�M�G�f�B�^�h�ɕ\������B
�@�@�@�EPIC������̃f�[�^��M�^�C�~���O�Ƃ͔��ŁA�P�O�Omsec����PC�̎�����\������B
�@�@�@�E�����́@SYSTEMTIME�\���̂���擾����B
�@�@
�@���@PIC��
�@�@�@�E�T�Omsec���ɐ������C���N�������g���ā@�P�X�Q�O�Obps�@��PC���ɑ��M����B
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄ ��CCS�ҁ�
//�@��PIC����
//*****************************************************************************
//�}���`�X���b�h����M�p
//�@�@�@�@�@�@�@�@�@�@�@ �v���O�����@�@�@�@ PIC18F452�@
//*****************************************************************************
#include "18f452.h"
#include "string.h"
#include "stdio.h"
#use delay(clock=40000000)
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=19200,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 19200bps TX=RC6,RX=RC7
#define ETX 0x03 // �d�s�w
#define ESC 0x1b // �d�r�b
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
long int Count_25msec = 0;
unsigned long int data1 = 0;
#int_timer0 //�^�C�}�P������(25msec���Ɋ����ݔ����j
interval()
{
set_timer0(34286); // 0.025��sec�~ 4 �~ 8 �~�@31250 = 25000usec = 25msec (st �V�X�e���N���b�N40MHz�j
// 256�~256�@-�@31250�@=�@34286
Count_25msec++;
if(Count_25msec >=2)
{
Count_25msec = 0;
data1++;
if(data1 >= 65535)data1 = 0;
// printf("%lu\r\n",data1);
printf("%lu",data1);
}
return 0;
}
main()
{
setup_timer_0(RTCC_INTERNAL |RTCC_DIV_8);
set_timer0(34286);
set_tris_b(0xFF);
// RCON = (RCON | 0b10000000); //���Z�b�g���䃌�W�X�^��b7 = 1�@���@�����ݗD�揇�ʐ���L
//�^�C�}�O�D��
// INTCON2 = (INTCON2 | 0b00001000);//�����ݐ��䃌�W�X�^2��b3 = 1 ���@�^�C�}�O�����݂����ʃ��x�������݂ɃZ�b�g
// IPR1 = (IPR1 & 0b11001111); //�����ݗD�揇�ʃ��W�X�^1��b4=0 b5=0 ���@UART�̑���M�����݂��ʃ��x�������݂ɃZ�b�g
delay_ms(1000);
output_low(PIN_E2);
enable_interrupts(INT_TIMER0); //T0�̊����݉���
enable_interrupts(GLOBAL); //�S�����݉���
while(1) //�@�����݂�҂�
{
}
return 0;
}
//***************************************************************************************************
//***************************************************************************************************
//***************************************************************************************************
// �@��PC ����
// ���̃v���O�����́@C++�@Builder Ver.6 �ō쐬����Ă��܂��B
�v���O�����̃\�[�X�R�[�h
//****************************************************************************************************
//****************************************************************************************************
//---------------------------------------------------------------------------
//�@Unit1.cpp �t�@�C���i���C���X���b�h�j
#include <vcl.h>
#pragma hdrstop
#include <stdio.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "MsTimer"
#pragma resource "*.dfm"
TForm1 *Form1;
SYSTEMTIME stTime; //�V�X�e���^�C���\����
int ix = 0;
extern HANDLE hPort; // �|�[�g�n���h��
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
receiveThread = new TReceiveThread(true);
//__fastcall TReceiveThread(bool CreateSuspended);
//�����FCreateSuspended��true�̏ꍇ�AExecute �������s�\�ȏ�Ԃőҋ@���Ă��� //Execute �������s�\�ȏ�Ԃőҋ@���Ă���
}
//---------------------------------------------------------------------------
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
CloseHandle(
hPort // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
);
if(receiveThread)receiveThread->Terminate();//
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
RichEdit1->Lines->Clear();
RichEdit2->Lines->Clear();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::MsTimer1Timer(TObject *Sender)
{
char strTime[128];
const char* KanjiWeek[7] = {"�i���j","�i���j","�i�j","�i���j","�i��)","�i��)","�i�y�j"};
AnsiString ansiStr;
GetLocalTime(&stTime);
sprintf(strTime , "%4d�N %2d�� %2d�� %s %2d�� %2d�� %2d�b" ,
stTime.wYear , stTime.wMonth , stTime.wDay , KanjiWeek[stTime.wDayOfWeek],
stTime.wHour , stTime.wMinute , stTime.wSecond
);
PcTimeMemo->Text = strTime;
sprintf(strTime,"%03d",stTime.wMilliseconds);
RichEdit2->SelText = (AnsiString)strTime;
RichEdit2->SelText = " ";
ix++;
if(ix >= 10)
{
ix = 0;
RichEdit2->SelText = "\n";
RichEdit2->SelText = "\n";
}
}
//---------------------------------------------------------------------------
//*************************************************************************************************
//Unit2.cpp �t�@�C���i��M�X���b�h�j
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include "mem.h"
#include "Unit2.h"
#pragma package(smart_init)
HANDLE hPort; // �|�[�g�n���h��
DCB dcb; // DCB�\����
COMMTIMEOUTS timeout; // COMMTIMEOUTS�\����
BOOL Ret; // ���߂�l
char* szStr;
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[10]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
int iy = 0;
__fastcall TReceiveThread::TReceiveThread(bool CreateSuspended)
: TThread(CreateSuspended)
{
// �iCOM2�|�[�g�́j�|�[�g�n���h�����擾����
hPort = CreateFile(
"COM2", //�@�@�|�[�g�̖��O�F �ǂ̃|�[�g���J���̂�
GENERIC_READ|GENERIC_WRITE, //�@�A�N�Z�X���[�h�F�@�ʏ푗��M�Ƃ�����̂œǏ����������w��
0, //�@�@���L���[�h�F�@�ʏ�0�ɐݒ�@�ăI�[�v���֎~
NULL, //�Z�L�����e�B�A�g���r���[�g�F�ʐM�ł͒ʏ�NULL�ɐݒ�@
OPEN_EXISTING, //�@�N���G�C�g�ި��r���[�V�����F�ʏ�COM�|�[�g�͂��łɑ��݂��Ă���̂�OPEN_EXISTING�Ƃ��܂��B
FILE_ATTRIBUTE_NORMAL, //�@�����F�ʐM�̏ꍇ�����͂Ȃ��̂�FILE_ATTRIBUTE_NORMAL�i�����Ȃ��j���w��@
NULL //�@�e���v���[�g�̃n���h���F�@�ʐM�̏ꍇ�W�Ȃ��@�ʏ�NULL���w��
);
if(hPort == INVALID_HANDLE_VALUE) //�n���h���擾�Ɏ��s�����ꍇ
{
MessageBox(NULL , "Port could not open" , "�x��" , MB_OK);
exit(0);
}
Ret = SetupComm( //�ݒ�
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
512, // ��M�o�b�t�@�[�T�C�Y�F�@��M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
512 // �@���M�o�b�t�@�[�T�C�Y�F�@���M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
);
if(Ret == FALSE) //�@���s�����ꍇ
{
MessageBox(NULL , "SetupComm failed" , TEXT("�x��") , MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm( //����
hPort, //�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR
// ���s���鑀��F ��L�͖������̓Ǐ����̒��~�y�ё���M�̃o�b�t�@�[�̃N���A���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL , "PurgeComm failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
dcb.DCBlength = sizeof(DCB); //�@ DCB�̃T�C�Y�F
//�f�[�^
dcb.BaudRate = 19200; // �`�����x�F�@�{�[���[�g��bps�P�ʂŎw��
dcb.fBinary = TRUE; // �o�C�i�����[�h�F �ʏ�TRUE�ɐݒ�
dcb.ByteSize = 8; //�@ �f�[�^�T�C�Y�@�F�@�ʏ�@8 �r�b�g
dcb.fParity = NOPARITY; // �p���e�B�L����ށ@�F�@�p���e�B�Ȃ��̏ꍇ��NOPARITY���w��
// ��p���e�B�̏ꍇ�� ODDPARITY �@��
dcb.StopBits = ONESTOPBIT; // �X�g�b�v�r�b�g�̐��F�@�ʏ�P�r�b�g�� ONESTOPBIT;
//�n�[�h�E�F�A�t���[����
dcb.fOutxCtsFlow = FALSE; // �@CTS�n�[�h�E�F�A�t���[����FCTS������g�p���Ȃ��ꍇ��FLASE���w��
// �@�@�@�@�@�@CTS���������ꍇ��TRUE���w�肵��CTS�M�����Ď����܂��B
dcb.fOutxDsrFlow = FALSE; // DSR�n�[�h�E�F�A�t���[����F�g�p���Ȃ��ꍇ��FALSE���w��
dcb.fDtrControl = DTR_CONTROL_DISABLE;// DTR�L��/�����F�@�����Ȃ�@DTR_CONTROL_DISABLE;ISABLE
dcb.fRtsControl = RTS_CONTROL_DISABLE; // RTS����F�@RTS��������Ȃ��ꍇ��RTS_CONTROL_DISABLE���w��
//�@�@�@�@�@�@�@�@ RTS���������ꍇ��RTS_CONTROL_ENABLE���w��@�@��
// �\�t�g�E�F�A�t���[����
dcb.fOutX = FALSE; // ���M��XON/OFF����̗L���F�@�Ȃ���FLALSE
dcb.fInX = FALSE; // ��M��XON/XOFF����̗L���F�Ȃ���FALSE
dcb.fTXContinueOnXoff = TRUE; // ��M�o�b�t�@�[���t��XOFF��M��̌p�����M�ہF���M��TRUE
dcb.XonLim = 512; // XON��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XoffLim = 512; // XOFF��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XonChar = 0x11; // ���M��XON���� ( ���M�F�r�W�B���� ) �̎w��F
//�@��ʂɁAXON�����Ƃ���11H ( �f�o�C�X����P�FDC1 )���悭�g���܂�
dcb.XoffChar = 0x13; // XOFF�����i���M�s�F�r�W�[�ʍ��j�̎w��F�Ȃ���FALSE
//�@��ʂɁAXOFF�����Ƃ���13H ( �f�o�C�X����3�FDC3 )���悭�g���܂�
//���̑�
dcb.fNull = TRUE; // NULL�o�C�g�̔j���F �j�����遨TRUE
dcb.fAbortOnError = TRUE; // �G���[���̓ǂݏ�������I���F�@�I�����遨TRUE
dcb.fErrorChar = FALSE; // �p���e�B�G���[�������̃L�����N�^�iErrorChar�j�u���F�@�Ȃ���FLALSE
dcb.ErrorChar = 0x00; // �p���e�B�G���[�������̒u���L�����N�^
dcb.EofChar = 0x03; // �f�[�^�I���ʒm�L�����N�^�@�F�@��ʂ�0x03(ETX)���悭�g���܂��B
dcb.EvtChar = 0x02; // �C�x���g�ʒm�L�����N�^ �F�@��ʂ�0x02(STX)���悭�g���܂�
Ret = SetCommState(hPort, &dcb); //SetCommState()���Ƀ|�[�g�n���h�������dcb�\���̂̃A�h���X��������
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL , "SetCommState failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
timeout.ReadIntervalTimeout = 5; // �����Ǎ����̂P����������̃^�C���A�E�g�܂ł̑҂����ԁimsec�j
timeout.ReadTotalTimeoutMultiplier = 0; //�Ǎ��̂P����������̎���
timeout.ReadTotalTimeoutConstant = 100; //�Ǎ��G���[���o�p�̃^�C���A�E�g����
//(��M�g�[�^���^�C���A�E�g) = ReadTotalTimeoutMultiplier * (��M�\��o�C�g��) + ReadTotalTimeoutConstant
timeout.WriteTotalTimeoutMultiplier = 5; //�������݂P����������̃^�C���A�E�g�܂ł̑҂�����
timeout.WriteTotalTimeoutConstant = 100;//�������݃G���[���o�p�̃^�C���A�E�g����
//(���M�g�[�^���^�C���A�E�g) = WriteTotalTimeoutMultiplier * (���M�\��o�C�g��) + WriteTotalTimeoutConstant
Ret = SetCommTimeouts(hPort, &timeout);//SetCommTimeOut()���Ƀ|�[�g�n���h�������COMMTIMEOUTS�\���̂�
//�A�h���X�������܂��B
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"SetCommTimeouts failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
FreeOnTerminate = true; //�X���b�h�I����ɃI�u�W�F�N�g�i�������j�������I�ɊJ������
//delete receiveThread; �͕s�v
Resume();
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::Execute()
{
// TODO : �X���b�h�Ƃ��Ď��s�������R�[�h���ȉ��ɋL�q */
while(!Terminated)
{
memset(&bReceiveBuffer,0,sizeof(&bReceiveBuffer));
Ret = ReadFile( // �f�[�^�̎�M
hPort, // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
&bReceiveBuffer, // ��M�o�b�t�@�[�̃|�C���^���w��F�@��M�f�[�^�������Ɋi�[����܂��B
5, //�@��M����o�C�g�����w��F�@�����Ŏw�肷��o�C�g������M���邩�܂��̓^�C���A�E�g���Ԃ�����܂�
// ReadFile()���́i�@getc()�̂悤�Ɂ@�j�҂��܂�
&nNumberOfBytesRead, // ���ۂɎ�M�����o�C�g�����i�[�����DWORD�l�̃|�C���^���w��
NULL // �ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
Application->MessageBox("�f�[�^�̓ǂݏo���ŃG���[������", "�x��", MB_OK ) ;
CloseHandle(hPort);
exit(0);
}
bReceiveBuffer[nNumberOfBytesRead] = '\0';
szStr = &bReceiveBuffer[0];
Synchronize(UpdateReceiveEdit);
}
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::UpdateReceiveEdit(void)
{
AnsiString str;
str.sprintf("%s",szStr); // ��M�f�[�^�iPIC���v�Z�����l�j��\��
Form1->RichEdit1->SelText = str;
Form1->RichEdit1->SelText = " ";
iy++;
if(iy >= 10)
{
iy = 0;
Form1->RichEdit1->SelText = "\n";
}
}
�����쌋�ʁ�
�@�E���L��Windows�̉�ʂ������܂��B
�@�EPIC����̃f�[�^�Ƃ���50msec���ɃC���N�������g���ꂽ�����������Ă��Ă��܂��B�G�f�B�b�g�{�b�N�X�̂P�s�Ƀf�[�^��
�@�@�P�O�ɂȂ�T�O�Omsec���ɉ��s����Ă��܂��B
�@�E�E�̗��ɂ�PC�̃V�X�e���������\�����Ă��܂��B�hPC�����h�G�f�B�b�g�{�b�N�X�ɂ�PIC����̃f�[�^�Ƃ͔��ŁA
�@�@�}���`���f�B�A�^�C�}�ɂ�鐳�m�ȂP�O�Omsec����STSTEMTIME��msec�̎������\������Ă����悤�ɂȂ��Ă��܂��B
�@�@�\���f�[�^���P�O�ɂȂ�1�O�O�Omsec���ɂQ�s���s����Ă��܂��B
�@�E�N���A�{�^�����N���b�N����Ɨ����̃G�f�B�b�g�{�b�N�X�������ɃN���A����č��������\�����n�܂�悤�Ƀv���O������
�@�@�ł��Ă��܂��B
�@�@�@

�i�V�j������̑���M�@�i�@�@�@Win32API�@�@-�@�@PIC�ԁ@�@�@�@�@�}���`�X���b�h�@�@�@�@��M�X���b�h�F �C�x���g����^�@�@�j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��CCS�ҁ�
�@CPU�̎��Ԃ�Q��Ȃ��A�C�x���g����������܂ŃX���b�h��ҋ@�������h�C�x���g����^��M�X���b�h�h�̗���Љ
�@�܂��B�n�[�h�y��PIC�̃\�t�g�́i�U�j�Ɠ����ł��B�i��PC�X���b�h�v���O�����̐����j
������i�̎d�l��
�@���@PC��
�@�@�@�E���C���X���b�h�����M�X���b�h�����A�C�x���g�������iPIC����̃f�[�^����M�o�b�t�@�[�Ɏ�M�����j��������
�@�@�@�@�X���b�h�̓�����J�n����B
�@�@�@�EPIC������f�[�^����M������A���₩�Ƀ��C���E�B���h�E�i���C���X���b�h�j�́hPIC����̎�M�G�f�B�^�h�ɕ\������B
�@�@�@�EPIC������̃f�[�^��M�^�C�~���O�Ƃ͔��ŁA�P�O�Omsec����PC�̎�����\������B
�@�@�@�E�����́@SYSTEMTIME�\���̂���擾����B
�@�@
�@���@PIC��
�@�@�@�E�T�Omsec���ɐ������C���N�������g���ā@�P�X�Q�O�Obps�@��PC���ɑ��M����B
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄ ��CCS�ҁ�
//�@��PIC����
//*****************************************************************************
//�}���`�X���b�h����M�p
//�@�@�@�@�@�@�@�@�@�@�@ �v���O�����@�@�@�@ PIC18F452�@
//*****************************************************************************
#include "18f452.h"
#include "string.h"
#include "stdio.h"
#use delay(clock=40000000)
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=19200,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 19200bps TX=RC6,RX=RC7
#define ETX 0x03 // �d�s�w
#define ESC 0x1b // �d�r�b
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
long int Count_25msec = 0;
unsigned long int data1 = 0;
#int_timer0 //�^�C�}�P������(25msec���Ɋ����ݔ����j
interval()
{
set_timer0(34286); // 0.025��sec�~ 4 �~ 8 �~�@31250 = 25000usec = 25msec (st �V�X�e���N���b�N40MHz�j
// 256�~256�@-�@31250�@=�@34286
Count_25msec++;
if(Count_25msec >=2)
{
Count_25msec = 0;
data1++;
if(data1 >= 65535)data1 = 0;
// printf("%lu\r\n",data1);
printf("%lu",data1);
}
return 0;
}
main()
{
setup_timer_0(RTCC_INTERNAL |RTCC_DIV_8);
set_timer0(34286);
set_tris_b(0xFF);
// RCON = (RCON | 0b10000000); //���Z�b�g���䃌�W�X�^��b7 = 1�@���@�����ݗD�揇�ʐ���L
//�^�C�}�O�D��
// INTCON2 = (INTCON2 | 0b00001000);//�����ݐ��䃌�W�X�^2��b3 = 1 ���@�^�C�}�O�����݂����ʃ��x�������݂ɃZ�b�g
// IPR1 = (IPR1 & 0b11001111); //�����ݗD�揇�ʃ��W�X�^1��b4=0 b5=0 ���@UART�̑���M�����݂��ʃ��x�������݂ɃZ�b�g
delay_ms(1000);
output_low(PIN_E2);
enable_interrupts(INT_TIMER0); //T0�̊����݉���
enable_interrupts(GLOBAL); //�S�����݉���
while(1) //�@�����݂�҂�
{
}
return 0;
}
//***************************************************************************************************
//***************************************************************************************************
//***************************************************************************************************
// �@��PC ����
// ���̃v���O�����́@C++�@Builder Ver.6 �ō쐬����Ă��܂��B
�v���O�����̃\�[�X�R�[�h
//****************************************************************************************************
//****************************************************************************************************
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include <stdio.h>
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "MsTimer"
#pragma resource "*.dfm"
TForm1 *Form1;
SYSTEMTIME stTime; //�V�X�e���^�C���\����
int ix = 0;
extern HANDLE hPort; // �|�[�g�n���h��
extern HANDLE hReceive; //�C�x���g�n���h��
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
receiveThread = new TReceiveThread(true); //��M�X���b�h�̃�����������
//CreateSuspended��true�̏ꍇ�AExecute �������s�\�ȏ�Ԃőҋ@���Ă��� //Execute �������s�\�ȏ�Ԃőҋ@���Ă���
//// �C�x���g���I�[�g���Z�b�g�A�V�O�i����Ԃō쐬����
//��RS232C��M�o�b�t�@���f�[�^����M������C�x���g��������
hReceive = CreateEvent(NULL, false, true, NULL); //�������Z�b�g�A������ԃV�O�i���i�҂���ԁj
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
RichEdit2->Lines->Clear();
RichEdit1->Lines->Clear();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::MsTimer1Timer(TObject *Sender)
{
char strTime[128];
const char* KanjiWeek[7] = {"�i���j","�i���j","�i�j","�i���j","�i��)","�i��)","�i�y�j"};
AnsiString ansiStr;
GetLocalTime(&stTime);
sprintf(strTime , "%4d�N %2d�� %2d�� %s %2d�� %2d�� %2d�b" ,
stTime.wYear , stTime.wMonth , stTime.wDay , KanjiWeek[stTime.wDayOfWeek],
stTime.wHour , stTime.wMinute , stTime.wSecond
);
PcTimeMemo->Text = strTime;
sprintf(strTime,"%03d",stTime.wMilliseconds);
RichEdit2->SelText = (AnsiString)strTime;
RichEdit2->SelText = " ";
ix++;
if(ix >= 10)
{
ix = 0;
RichEdit2->SelText = "\n";
RichEdit2->SelText = "\n";
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
CloseHandle(
hPort // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
);
if(receiveThread)receiveThread->Terminate();//
}
//---------------------------------------------------------------------------
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit2.h"
#include "Unit1.h"
#include "mem.h"
#pragma package(smart_init)
HANDLE hPort; // �|�[�g�n���h��
DCB dcb; // DCB�\����
COMMTIMEOUTS timeout; // COMMTIMEOUTS�\����
BOOL Ret; // ���߂�l
char* szStr;
// BYTE bSendBuffer[10]; // ���M�f�[�^
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[10]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
HANDLE hReceive;
int iy;
__fastcall TReceiveThread::TReceiveThread(bool CreateSuspended)
: TThread(CreateSuspended)
{
// �iCOM2�|�[�g�́j�|�[�g�n���h�����擾����
hPort = CreateFile(
"COM2", //�@�@�|�[�g�̖��O�F �ǂ̃|�[�g���J���̂�
GENERIC_READ|GENERIC_WRITE, //�@�A�N�Z�X���[�h�F�@�ʏ푗��M�Ƃ�����̂œǏ����������w��
0, //�@�@���L���[�h�F�@�ʏ�0�ɐݒ�@�ăI�[�v���֎~
NULL, //�Z�L�����e�B�A�g���r���[�g�F�ʐM�ł͒ʏ�NULL�ɐݒ�@
OPEN_EXISTING, //�@�N���G�C�g�ި��r���[�V�����F�ʏ�COM�|�[�g�͂��łɑ��݂��Ă���̂�OPEN_EXISTING�Ƃ��܂��B
FILE_ATTRIBUTE_NORMAL, //�@�����F�ʐM�̏ꍇ�����͂Ȃ��̂�FILE_ATTRIBUTE_NORMAL�i�����Ȃ��j���w��@
NULL //�@�e���v���[�g�̃n���h���F�@�ʐM�̏ꍇ�W�Ȃ��@�ʏ�NULL���w��
);
if(hPort == INVALID_HANDLE_VALUE) //�n���h���擾�Ɏ��s�����ꍇ
{
MessageBox(NULL , "Port could not open" , "�x��" , MB_OK);
exit(0);
}
Ret = SetupComm( //�ݒ�
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
512, // ��M�o�b�t�@�[�T�C�Y�F�@��M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
512 // �@���M�o�b�t�@�[�T�C�Y�F�@���M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
);
if(Ret == FALSE) //�@���s�����ꍇ
{
MessageBox(NULL , "SetupComm failed" , TEXT("�x��") , MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm( //����
hPort, //�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR
// ���s���鑀��F ��L�͖������̓Ǐ����̒��~�y�ё���M�̃o�b�t�@�[�̃N���A���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL , "PurgeComm failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
dcb.DCBlength = sizeof(DCB); //�@ DCB�̃T�C�Y�F
//�f�[�^
dcb.BaudRate = 19200; // �`�����x�F�@�{�[���[�g��bps�P�ʂŎw��
dcb.fBinary = TRUE; // �o�C�i�����[�h�F �ʏ�TRUE�ɐݒ�
dcb.ByteSize = 8; //�@ �f�[�^�T�C�Y�@�F�@�ʏ�@8 �r�b�g
dcb.fParity = NOPARITY; // �p���e�B�L����ށ@�F�@�p���e�B�Ȃ��̏ꍇ��NOPARITY���w��
// ��p���e�B�̏ꍇ�� ODDPARITY �@��
dcb.StopBits = ONESTOPBIT; // �X�g�b�v�r�b�g�̐��F�@�ʏ�P�r�b�g�� ONESTOPBIT;
//�n�[�h�E�F�A�t���[����
dcb.fOutxCtsFlow = FALSE; // �@CTS�n�[�h�E�F�A�t���[����FCTS������g�p���Ȃ��ꍇ��FLASE���w��
// �@�@�@�@�@�@CTS���������ꍇ��TRUE���w�肵��CTS�M�����Ď����܂��B
dcb.fOutxDsrFlow = FALSE; // DSR�n�[�h�E�F�A�t���[����F�g�p���Ȃ��ꍇ��FALSE���w��
dcb.fDtrControl = DTR_CONTROL_DISABLE;// DTR�L��/�����F�@�����Ȃ�@DTR_CONTROL_DISABLE;ISABLE
dcb.fRtsControl = RTS_CONTROL_DISABLE; // RTS����F�@RTS��������Ȃ��ꍇ��RTS_CONTROL_DISABLE���w��
//�@�@�@�@�@�@�@�@ RTS���������ꍇ��RTS_CONTROL_ENABLE���w��@�@��
// �\�t�g�E�F�A�t���[����
dcb.fOutX = FALSE; // ���M��XON/OFF����̗L���F�@�Ȃ���FLALSE
dcb.fInX = FALSE; // ��M��XON/XOFF����̗L���F�Ȃ���FALSE
dcb.fTXContinueOnXoff = TRUE; // ��M�o�b�t�@�[���t��XOFF��M��̌p�����M�ہF���M��TRUE
dcb.XonLim = 512; // XON��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XoffLim = 512; // XOFF��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XonChar = 0x11; // ���M��XON���� ( ���M�F�r�W�B���� ) �̎w��F
//�@��ʂɁAXON�����Ƃ���11H ( �f�o�C�X����P�FDC1 )���悭�g���܂�
dcb.XoffChar = 0x13; // XOFF�����i���M�s�F�r�W�[�ʍ��j�̎w��F�Ȃ���FALSE
//�@��ʂɁAXOFF�����Ƃ���13H ( �f�o�C�X����3�FDC3 )���悭�g���܂�
//���̑�
dcb.fNull = TRUE; // NULL�o�C�g�̔j���F �j�����遨TRUE
dcb.fAbortOnError = TRUE; // �G���[���̓ǂݏ�������I���F�@�I�����遨TRUE
dcb.fErrorChar = FALSE; // �p���e�B�G���[�������̃L�����N�^�iErrorChar�j�u���F�@�Ȃ���FLALSE
dcb.ErrorChar = 0x00; // �p���e�B�G���[�������̒u���L�����N�^
dcb.EofChar = 0x03; // �f�[�^�I���ʒm�L�����N�^�@�F�@��ʂ�0x03(ETX)���悭�g���܂��B
dcb.EvtChar = 0x02; // �C�x���g�ʒm�L�����N�^ �F�@��ʂ�0x02(STX)���悭�g���܂�
Ret = SetCommState(hPort, &dcb); //SetCommState()���Ƀ|�[�g�n���h�������dcb�\���̂̃A�h���X��������
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL , "SetCommState failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
timeout.ReadIntervalTimeout = 5; // �����Ǎ����̂P����������̃^�C���A�E�g�܂ł̑҂����ԁimsec�j
timeout.ReadTotalTimeoutMultiplier = 0; //�Ǎ��̂P����������̎���
timeout.ReadTotalTimeoutConstant = 100; //�Ǎ��G���[���o�p�̃^�C���A�E�g����
//(��M�g�[�^���^�C���A�E�g) = ReadTotalTimeoutMultiplier * (��M�\��o�C�g��) + ReadTotalTimeoutConstant
timeout.WriteTotalTimeoutMultiplier = 5; //�������݂P����������̃^�C���A�E�g�܂ł̑҂�����
timeout.WriteTotalTimeoutConstant = 100;//�������݃G���[���o�p�̃^�C���A�E�g����
//(���M�g�[�^���^�C���A�E�g) = WriteTotalTimeoutMultiplier * (���M�\��o�C�g��) + WriteTotalTimeoutConstant
Ret = SetCommTimeouts(hPort, &timeout);//SetCommTimeOut()���Ƀ|�[�g�n���h�������COMMTIMEOUTS�\���̂�
//�A�h���X�������܂��B
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"SetCommTimeouts failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
FreeOnTerminate = true; //�X���b�h�I����ɃI�u�W�F�N�g�i�������j�������I�ɊJ������
//delete receiveThread; �͕s�v
Resume(); //�X�^�[�g
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::Execute()
{
// TODO : �X���b�h�Ƃ��Ď��s�������R�[�h���ȉ��ɋL�q */
while(!Terminated)
{
//// �Ǎ��C�x���g����������܂�TCounterThread��suspend��ԂɂȂ��đҋ@����
WaitForSingleObject(hReceive, INFINITE);
memset(&bReceiveBuffer,0,sizeof(&bReceiveBuffer));
Ret = ReadFile( // �f�[�^�̎�M
hPort, // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
&bReceiveBuffer, // ��M�o�b�t�@�[�̃|�C���^���w��F�@��M�f�[�^�������Ɋi�[����܂��B
5, //�@��M����o�C�g�����w��F�@�����Ŏw�肷��o�C�g������M���邩�܂��̓^�C���A�E�g���Ԃ�����܂�
// ReadFile()���́i�@getc()�̂悤�Ɂ@�j�҂��܂�
&nNumberOfBytesRead, // ���ۂɎ�M�����o�C�g�����i�[�����DWORD�l�̃|�C���^���w��
NULL // �ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
Application->MessageBox("�f�[�^�̓ǂݏo���ŃG���[������", "�x��", MB_OK ) ;
CloseHandle(hPort);
exit(0);
}
bReceiveBuffer[nNumberOfBytesRead] = '\0';
szStr = &bReceiveBuffer[0];
Synchronize(UpdateReceiveEdit); //Windows�œ������Ƃ��ă��C���X���b�h�Ŏ��s
//// �C�x���g�������Z�b�g
SetEvent(hReceive);
}
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::UpdateReceiveEdit(void)
{
AnsiString str;
str.sprintf("%s",szStr); // ��M�f�[�^�iPIC���v�Z�����l�j��\��
Form1->RichEdit1->SelText = str;
Form1->RichEdit1->SelText = " ";
iy++;
if(iy >= 10)
{
iy = 0;
Form1->RichEdit1->SelText = "\n";
}
}
�@�����쌋�ʁ�
�@�E���L��Windows�̉�ʂ������܂��B�@���ʂ́i�U�j�̔�C�x���g����^��M�X���b�h�̏ꍇ�ƑS�������ł��B�@CPU�p���[��
�@�@�K�v�ȃA�v���s���ē��삳�����ꍇ�͖��m�ȈႢ�������邱�Ƃł��傤�B�@
�@�EPIC����̃f�[�^�Ƃ���50msec���ɃC���N�������g���ꂽ�����������Ă��Ă��܂��B�G�f�B�b�g�{�b�N�X�̂P�s�Ƀf�[�^��
�@�@�P�O�ɂȂ�T�O�Omsec���ɉ��s����Ă��܂��B
�@�E�E�̗��ɂ�PC�̃V�X�e���������\�����Ă��܂��B�hPC�����h�G�f�B�b�g�{�b�N�X�ɂ�PIC����̃f�[�^�Ƃ͔��ŁA
�@�@�}���`���f�B�A�^�C�}�ɂ�鐳�m�ȂP�O�Omsec����STSTEMTIME��msec�̎������\������Ă����悤�ɂȂ��Ă��܂��B
�@�@�\���f�[�^���P�O�ɂȂ�1�O�O�Omsec���ɂQ�s���s����Ă��܂��B
�@�E�N���A�{�^�����N���b�N����Ɨ����̃G�f�B�b�g�{�b�N�X�������ɃN���A����č��������\�����n�܂�悤�Ƀv���O������
�@�@�ł��Ă��܂��B
�@�@�@
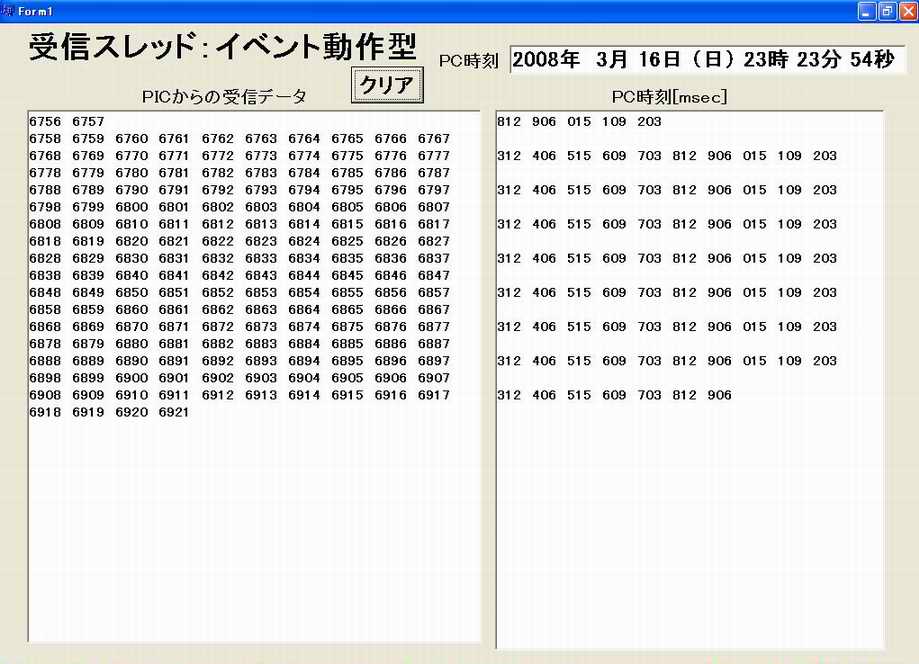
�i�W�j������̑���M�@�iWin32API�@-�@PIC�ԁ@�}���`�X���b�h�@�@�N���e�B�J���Z�N�V�����@�@�j�@�@��CCS�ҁ�
�@�@�Q�̃X���b�h���P�̋��L����f�[�^�ɃA�N�Z�X����Ɩ�肪�������܂��B�f�[�^�x�[�X�̂ЂƂ̃f�[�^���Q�l��
�@�����ɏ������݂������Ȃ����ꍇ���l����Ζ��̏d�傳���킩��܂��B�Q�̃X���b�h�������ɃA�N�Z�X����\����
�@���镔�����N���e�B�J���Z�N�V�����Ɖ]���܂��B�@Win32API�ɂ̓N���e�B�J���Z�N�V�����ւ̓����A�N�Z�X���u���b�N����
�@�����p�ӂ���Ă��܂��B�ȉ��Ɏg�p����Љ�܂��B�i��PC�X���b�h�v���O�����̐����j
������i�̎d�l��
�@���@PC��
�@�@�@�E���C���X���b�h�����M�X���b�h������PIC������̑��M�f�[�^���Ď�����B
�@�@�@�EPIC������100msec���ɑ����Ă���f�[�^����M�X���b�h�Ŏ�M������A30msec�̃X���b�h�X���[�v�チ�C���E�B��
�@�@�@�@�h�E�i���C���X���b�h�j�́hPIC����̎�M�G�f�B�^�h�ɕ\������B
�@�@�@�E����APIC���瑗���Ă����\���O�̎�M�f�[�^��50msec���Ƀ��C���X���b�h�Łh00000�h�ɏ���������B
�@�@�@�E�����ϐ��i��M�f�[�^�j���������މ��L�������N���e�B�J���Z�N�V�����ɂ���B
�@�@�@�@�@�@��M�X���b�h���PIC������̎�M�f�[�^���������ĕ\������Synchronize( )������
�@�@�@�@�@�A���C���X���b�h��Ŏ�M�f�[�^���h00000�h�ɏ��������镔��
�@�@�@�E�N���e�B�J���Z�N�V�����L�������C���E�B���h�E�̃`�F�b�N�{�b�N�X�Ő�ւ�����悤�ɂ���B
�@�@
�@���@PIC��
�@�@�@�E�P�O�Omsec���ɐ������C���N�������g���ā@�P�X�Q�O�Obps�@��PC���ɑ��M����B
�@
�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄ ��CCS�ҁ�
//*****************************************************************************
//�}���`�X���b�h����M�p
//�@�@�@�@�@�@�@�@�@�@�@ �v���O�����@�@�@�@ PIC18F452�@
//*****************************************************************************
#include "18f452.h"
#include "string.h"
#include "stdio.h"
#use delay(clock=40000000)
#FUSES H4,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=19200,XMIT=PIN_C6,RCV=PIN_C7) // �{�[���[�g = 19200bps TX=RC6,RX=RC7
#define ETX 0x03 // �d�s�w
#define ESC 0x1b // �d�r�b
#define NAK 0x15 // �^�C���A�E�g�����ꍇ�̑��M�����Ƃ���NAK���g�p
long int Count_25msec = 0;
unsigned long int data1 = 0;
#int_timer0 //�^�C�}�P������(25msec���Ɋ����ݔ����j
interval()
{
set_timer0(34286); // 0.025��sec�~ 4 �~ 8 �~�@31250 = 25000usec = 25msec (st �V�X�e���N���b�N40MHz�j
// 256�~256�@-�@31250�@=�@34286
Count_25msec++;
if(Count_25msec >=4)
{
Count_25msec = 0;
data1++;
if(data1 >= 65535)data1 = 0;
// printf("%lu\r\n",data1);
printf("%lu",data1);
}
return 0;
}
main()
{
setup_timer_0(RTCC_INTERNAL |RTCC_DIV_8);
set_timer0(34286);
set_tris_b(0xFF);
// RCON = (RCON | 0b10000000); //���Z�b�g���䃌�W�X�^��b7 = 1�@���@�����ݗD�揇�ʐ���L
//�^�C�}�O�D��
// INTCON2 = (INTCON2 | 0b00001000);//�����ݐ��䃌�W�X�^2��b3 = 1 ���@�^�C�}�O�����݂����ʃ��x�������݂ɃZ�b�g
// IPR1 = (IPR1 & 0b11001111); //�����ݗD�揇�ʃ��W�X�^1��b4=0 b5=0 ���@UART�̑���M�����݂��ʃ��x�������݂ɃZ�b�g
delay_ms(1000);
output_low(PIN_E2);
enable_interrupts(INT_TIMER0); //T0�̊����݉���
enable_interrupts(GLOBAL); //�S�����݉���
while(1) //�@�����݂�҂�
{
}
return 0;
}
//***************************************************************************************************
//***************************************************************************************************
// �@��PC ����
// ���̃v���O�����́@C++�@Builder Ver.6 �ō쐬����Ă��܂��B
�v���O�����̃\�[�X�R�[�h
//****************************************************************************************************
//****************************************************************************************************
//Unit1.cpp
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <stdio.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "MsTimer"
#pragma resource "*.dfm"
TForm1 *Form1;
int ix = 0;
extern AnsiString str;
extern HANDLE hPort; // �|�[�g�n���h��
extern CRITICAL_SECTION CriticalSection; //�N���e�B�J���Z�N�V�����\����
extern bool CS_Mode;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
receiveThread = new TReceiveThread(true);
//__fastcall TReceiveThread(bool CreateSuspended);
//�����FCreateSuspended��true�̏ꍇ�AExecute �������s�\�ȏ�Ԃőҋ@���Ă��� //Execute �������s�\�ȏ�Ԃőҋ@���Ă���
// �N���e�B�J���Z�N�V����������������
InitializeCriticalSection(&CriticalSection);
}
//---------------------------------------------------------------------------
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
CloseHandle(
hPort // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
);
if(receiveThread)receiveThread->Terminate();//
// �N���e�B�J���Z�N�V�������폜����
DeleteCriticalSection(&CriticalSection);
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
RichEdit1->Lines->Clear();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::MsTimer1Timer(TObject *Sender)
{
if(CS_Mode)//�N���e�B�J���Z�N�V�������[�h�̏ꍇ
{
EnterCriticalSection(&CriticalSection); //�N���e�B�J���Z�N�V�������[�h��
str.sprintf("0000"); // PIC����̎�M�f�[�^��\��
LeaveCriticalSection(&CriticalSection); //�N���e�B�J���Z�N�V�������[�h�I��
}
else str.sprintf("00000"); // PIC����̎�M�f�[�^��\��
}
//---------------------------------------------------------------------------
//Unit2.cpp
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "Unit1.h"
#include "mem.h"
#include "Unit2.h"
#pragma package(smart_init)
HANDLE hPort; // �|�[�g�n���h��
DCB dcb; // DCB�\����
COMMTIMEOUTS timeout; // COMMTIMEOUTS�\����
BOOL Ret; // ���߂�l
char* szStr;
DWORD nNumberOfBytesToWrite; // ���M�f�[�^�̃o�C�g��
DWORD nNumberOfBytesWritten; // ���ۂɑ��M���ꂽ�f�[�^�̃o�C�g��
BYTE bReceiveBuffer[10]; // ��M�f�[�^
DWORD nNumberOfBytesRead; // ���ۂɎ�M���ꂽ�f�[�^�̃o�C�g��
int iy = 0;
AnsiString str;
CRITICAL_SECTION CriticalSection; //�N���e�B�J���Z�N�V�����\����
bool CS_Mode;
//--------------------------------------------------------------------------
__fastcall TReceiveThread::TReceiveThread(bool CreateSuspended)
: TThread(CreateSuspended)
{
// �iCOM2�|�[�g�́j�|�[�g�n���h�����擾����
hPort = CreateFile(
"COM2", //�@�@�|�[�g�̖��O�F �ǂ̃|�[�g���J���̂�
GENERIC_READ|GENERIC_WRITE, //�@�A�N�Z�X���[�h�F�@�ʏ푗��M�Ƃ�����̂œǏ����������w��
0, //�@�@���L���[�h�F�@�ʏ�0�ɐݒ�@�ăI�[�v���֎~
NULL, //�Z�L�����e�B�A�g���r���[�g�F�ʐM�ł͒ʏ�NULL�ɐݒ�@
OPEN_EXISTING, //�@�N���G�C�g�ި��r���[�V�����F�ʏ�COM�|�[�g�͂��łɑ��݂��Ă���̂�OPEN_EXISTING�Ƃ��܂��B
FILE_ATTRIBUTE_NORMAL, //�@�����F�ʐM�̏ꍇ�����͂Ȃ��̂�FILE_ATTRIBUTE_NORMAL�i�����Ȃ��j���w��@
NULL //�@�e���v���[�g�̃n���h���F�@�ʐM�̏ꍇ�W�Ȃ��@�ʏ�NULL���w��
);
if(hPort == INVALID_HANDLE_VALUE) //�n���h���擾�Ɏ��s�����ꍇ
{
MessageBox(NULL , "Port could not open" , "�x��" , MB_OK);
exit(0);
}
Ret = SetupComm( //�ݒ�
hPort, // �@�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
512, // ��M�o�b�t�@�[�T�C�Y�F�@��M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
512 // �@���M�o�b�t�@�[�T�C�Y�F�@���M�̃o�b�t�@�[�T�C�Y���o�C�g�P�ʂŎw��
);
if(Ret == FALSE) //�@���s�����ꍇ
{
MessageBox(NULL , "SetupComm failed" , TEXT("�x��") , MB_OK);
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm( //����
hPort, //�ʐM�f�o�C�X�̃n���h���FCreateFile()�Ŏ擾�����n���h�����w��
PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR
// ���s���鑀��F ��L�͖������̓Ǐ����̒��~�y�ё���M�̃o�b�t�@�[�̃N���A���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL , "PurgeComm failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
dcb.DCBlength = sizeof(DCB); //�@ DCB�̃T�C�Y�F
//�f�[�^
dcb.BaudRate = 19200; // �`�����x�F�@�{�[���[�g��bps�P�ʂŎw��
dcb.fBinary = TRUE; // �o�C�i�����[�h�F �ʏ�TRUE�ɐݒ�
dcb.ByteSize = 8; //�@ �f�[�^�T�C�Y�@�F�@�ʏ�@8 �r�b�g
dcb.fParity = NOPARITY; // �p���e�B�L����ށ@�F�@�p���e�B�Ȃ��̏ꍇ��NOPARITY���w��
// ��p���e�B�̏ꍇ�� ODDPARITY �@��
dcb.StopBits = ONESTOPBIT; // �X�g�b�v�r�b�g�̐��F�@�ʏ�P�r�b�g�� ONESTOPBIT;
//�n�[�h�E�F�A�t���[����
dcb.fOutxCtsFlow = FALSE; // �@CTS�n�[�h�E�F�A�t���[����FCTS������g�p���Ȃ��ꍇ��FLASE���w��
// �@�@�@�@�@�@CTS���������ꍇ��TRUE���w�肵��CTS�M�����Ď����܂��B
dcb.fOutxDsrFlow = FALSE; // DSR�n�[�h�E�F�A�t���[����F�g�p���Ȃ��ꍇ��FALSE���w��
dcb.fDtrControl = DTR_CONTROL_DISABLE;// DTR�L��/�����F�@�����Ȃ�@DTR_CONTROL_DISABLE;ISABLE
dcb.fRtsControl = RTS_CONTROL_DISABLE; // RTS����F�@RTS��������Ȃ��ꍇ��RTS_CONTROL_DISABLE���w��
//�@�@�@�@�@�@�@�@ RTS���������ꍇ��RTS_CONTROL_ENABLE���w��@�@��
// �\�t�g�E�F�A�t���[����
dcb.fOutX = FALSE; // ���M��XON/OFF����̗L���F�@�Ȃ���FLALSE
dcb.fInX = FALSE; // ��M��XON/XOFF����̗L���F�Ȃ���FALSE
dcb.fTXContinueOnXoff = TRUE; // ��M�o�b�t�@�[���t��XOFF��M��̌p�����M�ہF���M��TRUE
dcb.XonLim = 512; // XON��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XoffLim = 512; // XOFF��������܂łɊi�[�ł���ŏ��o�C�g���F
dcb.XonChar = 0x11; // ���M��XON���� ( ���M�F�r�W�B���� ) �̎w��F
//�@��ʂɁAXON�����Ƃ���11H ( �f�o�C�X����P�FDC1 )���悭�g���܂�
dcb.XoffChar = 0x13; // XOFF�����i���M�s�F�r�W�[�ʍ��j�̎w��F�Ȃ���FALSE
//�@��ʂɁAXOFF�����Ƃ���13H ( �f�o�C�X����3�FDC3 )���悭�g���܂�
//���̑�
dcb.fNull = TRUE; // NULL�o�C�g�̔j���F �j�����遨TRUE
dcb.fAbortOnError = TRUE; // �G���[���̓ǂݏ�������I���F�@�I�����遨TRUE
dcb.fErrorChar = FALSE; // �p���e�B�G���[�������̃L�����N�^�iErrorChar�j�u���F�@�Ȃ���FLALSE
dcb.ErrorChar = 0x00; // �p���e�B�G���[�������̒u���L�����N�^
dcb.EofChar = 0x03; // �f�[�^�I���ʒm�L�����N�^�@�F�@��ʂ�0x03(ETX)���悭�g���܂��B
dcb.EvtChar = 0x02; // �C�x���g�ʒm�L�����N�^ �F�@��ʂ�0x02(STX)���悭�g���܂�
Ret = SetCommState(hPort, &dcb); //SetCommState()���Ƀ|�[�g�n���h�������dcb�\���̂̃A�h���X��������
if(Ret == FALSE) // ���s�����ꍇ
{
MessageBox(NULL , "SetCommState failed" , "�x��" , MB_OK);
CloseHandle(hPort);
exit(0);
}
timeout.ReadIntervalTimeout = 5; // �����Ǎ����̂P����������̃^�C���A�E�g�܂ł̑҂����ԁimsec�j
timeout.ReadTotalTimeoutMultiplier = 0; //�Ǎ��̂P����������̎���
timeout.ReadTotalTimeoutConstant = 100; //�Ǎ��G���[���o�p�̃^�C���A�E�g����
//(��M�g�[�^���^�C���A�E�g) = ReadTotalTimeoutMultiplier * (��M�\��o�C�g��) + ReadTotalTimeoutConstant
timeout.WriteTotalTimeoutMultiplier = 5; //�������݂P����������̃^�C���A�E�g�܂ł̑҂�����
timeout.WriteTotalTimeoutConstant = 100;//�������݃G���[���o�p�̃^�C���A�E�g����
//(���M�g�[�^���^�C���A�E�g) = WriteTotalTimeoutMultiplier * (���M�\��o�C�g��) + WriteTotalTimeoutConstant
Ret = SetCommTimeouts(hPort, &timeout);//SetCommTimeOut()���Ƀ|�[�g�n���h�������COMMTIMEOUTS�\���̂�
//�A�h���X�������܂��B
if(Ret == FALSE) //���s�����ꍇ
{
MessageBox(NULL,"SetCommTimeouts failed","�x��", MB_OK);
CloseHandle(hPort);
exit(0);
}
FreeOnTerminate = true; //�X���b�h�I����ɃI�u�W�F�N�g�i�������j�������I�ɊJ������
//delete receiveThread; �͕s�v
Resume();
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::Execute()
{
// TODO : �X���b�h�Ƃ��Ď��s�������R�[�h���ȉ��ɋL�q */
while(!Terminated)
{
memset(&bReceiveBuffer,0,sizeof(&bReceiveBuffer));
Ret = ReadFile( // �f�[�^�̎�M
hPort, // �@�ʐM�f�o�C�X�̃n���h���F�@CreateFile()�Ŏ擾�����n���h�����w��
&bReceiveBuffer, // ��M�o�b�t�@�[�̃|�C���^���w��F�@��M�f�[�^�������Ɋi�[����܂��B
5, //�@��M����o�C�g�����w��F�@�����Ŏw�肷��o�C�g������M���邩�܂��̓^�C���A�E�g���Ԃ�����܂�
// ReadFile()���́i�@getc()�̂悤�Ɂ@�j�҂��܂�
&nNumberOfBytesRead, // ���ۂɎ�M�����o�C�g�����i�[�����DWORD�l�̃|�C���^���w��
NULL // �ʐM�Ƃ͊W�Ȃ������Ȃ̂�NULL���w��
);
if(Ret == FALSE) //���s�����ꍇ
{
Application->MessageBox("�f�[�^�̓ǂݏo���ŃG���[������", "�x��", MB_OK ) ;
CloseHandle(hPort);
exit(0);
}
bReceiveBuffer[nNumberOfBytesRead] = '\0';
szStr = &bReceiveBuffer[0];
Synchronize(UpdateReceiveEdit);
}
}
//---------------------------------------------------------------------------
void __fastcall TReceiveThread::UpdateReceiveEdit(void)
{
CS_Mode = Form1->CheckBox1->Checked;
if(CS_Mode)//�N���e�B�J���Z�N�V�������[�h�̏ꍇ
{
EnterCriticalSection(&CriticalSection); //�N���e�B�J���Z�N�V�������[�h��
str.sprintf("%s",szStr); // ��M�f�[�^�iPIC���v�Z�����l�j��\��
Sleep(30);
Form1->RichEdit1->SelText = str;
Form1->RichEdit1->SelText = " ";
iy++;
if(iy >= 10)
{
iy = 0;
Form1->RichEdit1->SelText = "\n";
}
LeaveCriticalSection(&CriticalSection); //�N���e�B�J���Z�N�V�������[�h�I��
}
else
{
str.sprintf("%s",szStr); // ��M�f�[�^�iPIC���v�Z�����l�j��\��
Sleep(30);
Form1->RichEdit1->SelText = str;
Form1->RichEdit1->SelText = " ";
iy++;
if(iy >= 10)
{
iy = 0;
Form1->RichEdit1->SelText = "\n";
}
}
}
�����쌋�ʁ�
�@�@�E���쌋�ʂ�PC��ʂ��ȉ��Ɏ����܂� �@
�@�@�E�P�O�s�ڂ܂ł̓N���e�B�J���Z�N�V�����̃`�F�b�N�{�b�N�X���͂�����PIC����̃f�[�^����M���Ă��܂��B�T�Omsec����
�@�@�@��M�f�[�^���h00000�h�ɏ����������Ă���̂��킩��܂��B
�@�@�E�P�O�s�ڂɕ\�����ړ������^�C�~���O�Ń}�E�X�ŃN���e�B�J���Z�N�V�����̃`�F�b�N��ON�ɂ��܂����B�N���e�B�J���Z�N�V����
�@�@�@���䂪ON�ɂȂ������ߎ�M�f�[�^�̏���������������Ȃ��Ȃ肷�ׂĂ̎�M�f�[�^������ɕ\�������悤�ɂȂ���
�@�@�@���܂��B
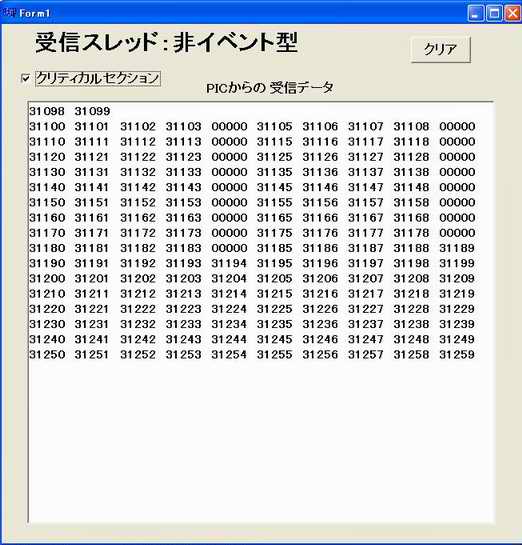
�i�X�j�@�����̑���M�@�i�@�DNET�@�@�|�@�@PIC�@�ԁ@�@�@�@�j�@��CCS�ҁ���C18�ҁ�
�@�@�@PC�����@C#�ɂ��Microsoft .NET Framework 3.0�̃A�v���Ƃ����ꍇ��PIC�Ƃ̒ʐM����Љ�܂��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�@�DNET���ɂ��Ắ@�DNET���v���O�������Q�Ɗ肢�܂��j
PIC���́A�����ݐ��䃌�W�X�^��USART��M�����t���O�����������A�����݂������Ă��܂��B
�@������i�d�l��
�@�@�E�@PC��COM�|�[�g��PIC���Ȃ��@ PC�iMicrosoft .NET Framework 3.0�j��PIC�Ԃ̒ʐM�������Ȃ��B
�@�@�@�@����M�͂P�o�C�g��ASCII�R�[�h�Ƃ���B�iShift JIS �Ƃ���B�@16�o�C�g��Unicode�ł͂Ȃ��j
�@�@�E�@PC�̉�ʏ�́hA�h�A�hB�h�A�hC�h�{�^�����}�E�X�ŃN���b�N����Ɓ@A�AB�AC �����M�����B
�@�@�E�@PIC���ł������M���A�t���ɂ��ꂼ��ȉ��̂悤�ɕ\������B
�@�@�@�@�@�@�i��j�@�@�Q�ԖڂɃN���b�N�����{�^�����hB�h�̏ꍇ�@�c�c�@�@buf[1]=B
�@�@�E�@�hEnter�h�{�^�����{�^�����N���b�N����Ɓ@�h\r�h�����M����A����܂łɑ��M����Ă����������ׂĂ��܂Ƃ߂ĂP�s�Ł@�t���ɕ\������B
�@�@�@�@�i��j�@�@�hA�h�@�hB�h�@�hC�h�@�@�ƃN���b�N�������ƂɁhEnter�h���N���b�N���ꂽ�ꍇ�@�@�c�c�@ABC
�@�@�E�܂��@�hEnter�h�{�^�����N���b�N���ꂽ���ɂ͂���܂łɑ��M����Ă����������܂Ƃ߂�PC���ɑ��M����B
�@�@�EPC���ł͂������Ă����������e�L�X�g�{�b�N�X�ɕ\������
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F4550���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
���@��CCS�ҁ�
PIC���̃v���O�������ȉ��Ɏ����܂��BPC���̃v���O�����́@PC���v���O�������Q�Ɗ肢�܂�
�@���v���O�����၄
//�@PC�� (.NET Flamework)�@���@RS232C�@���@PIC18F4550�@�{�@LCD
//�@RDA�����݂ɂ���M
/*
PC���j�^�o��
buf[0]=a
buf[1]=b
buf[2]=c
abc
buf[0]=1
buf[1]=2
buf[2]=3
buf[3]=4
buf[4]=5
12345
*/
#include "18f4550.h"
#use delay(clock=20000000) // 20MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7,stream=PC) // �{�[���[�g = 9600bps TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
char buf[20];
int i =0;
#INT_RDA
void rs232c()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
printf(buf); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
putc('\r');putc('\n');putc('\r');putc('\n'); //�P�s������
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
i++;
}
}
main(){
set_tris_c(0b10000000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
enable_interrupts(INT_RDA);
enable_interrupts(GLOBAL);
while(1)
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
��C18�ҁ��@�@�@�@�@�@
�@���v���O�����၄
/*
PC-PIC�ԁ@RS232C�ʐM�@�@��C18�R���p�C����
�@�@��M�@�F�@��M�������ݕ���
�@�@PC�@�F�@N.NET
�@�@PIC�@�F�@PIC18F4550�@�t���t
*/
#include <p18f4550.h>
#include <usart.h>
#include <stdio.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config FOSC = HS // f=20MHz
#pragma config WDT = OFF
#pragma config LVP = OFF
char buf[20]; // �^�C�v���������p�̃��W�X�^
int i = 0;
void RS232(void);
#pragma code low_vector=0x18 //��ʃ��x��������
void low_interrupt (void)
{
_asm GOTO RS232 _endasm
}
#pragma code
#pragma interruptlow RS232
void RS232() //�@��M�����݊�
{
char Buffer[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* str;
PIR1bits.RCIF = 0; //PIR1 ���W�X�^��RCIF�r�b�g�i��M�t���O�j���N���A
buf[i] = getcUSART(); //��M�f�[�^��ǂݍ���
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
str = &buf[0]; //�@�|�C���^�ɃA�h���X����
printf("%s",str);
//�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
printf("\n\r\n\r");
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
printf("buf[%d]=%c\r\n",i,buf[i]); //�@PC�փG�R�[�o�b�N�@���@�n�C�p�[�^�[�~�i���ɕ\��
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
sprintf(Buffer,"buf[%d]=%c",i,buf[i]);//�@PIC�ɐڑ����Ă���t���Ɏ�M������\��
str = &Buffer[0]; //�@�|�C���^�ɃA�h���X����
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
i++;
}
}
void main (void)
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* tempStr;
TRISC = 0b10111111; //RC7(RX)�F input mode RC6(TX): output mode
OpenUSART( USART_TX_INT_OFF & //���M�����ݑ��M�FOFF
USART_RX_INT_ON & //�����ݎ�M�FON
USART_ASYNCH_MODE & //���������ʐM���[�h
USART_EIGHT_BIT & //�f�[�^���F�W�r�b�g
USART_CONT_RX & //�A����M���[�h
USART_BRGH_HIGH, //�{�[���[�g�FHIGH�`�����x���[�h spbrg=129�@
//bau rate = Fosc/(128*(spbrg + 1))
129 ); // = 20000000/(16*(129 + 1)) = 9615.4 bps
// error rate = (9615.4-9600)/9600 = 0.0016
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
sprintf(tempBuf,"Start2 !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
tempStr = &tempBuf[0]; //�@�|�C���^�ɃA�h���X����
while(*tempStr) //������I�[�� '\0'�����o����܂�
{
lcd_data(*tempStr); //�@�P�����\��
tempStr++;
}
RCONbits.IPEN = 0; //�����ݗD�揇�ʐ���FOFF�@�iRCON ���W�X�^��IPEN�r�b�g = 0)
INTCONbits.GIE = 1; //�S��������
INTCONbits.PEIE = 1; //���Ӌ@�\�̊����ݗL��
while (1)
{
}
CloseUSART();
}
//************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�����쌋�ʁ�
| �@ |
�@PC��ʏ�ŁhA�h�{�^�����N���b�N�����ꍇ |
|
PC��ʏ�ŁhA�h�A�hB�h�A�hC�h�A�hC�h�A�hB�h�A�hA�h��
�N���b�N��@�hEnter�h���N���b�N�����ꍇ |
| �t���\�� |
 |
�@ |
 |
| �@ |
�@ |
�@ |
�@ |
| PC��Window��� |
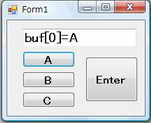 |
�@ |
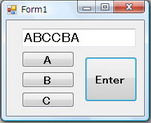 |
�i10�j������̑���M�i�D�m�d�s�@�`�@�o�h�b�ԁ@�}���`�X���b�h�ҁ@�p�����̑���M�@�j��CCS�ҁ��@���b18�ҁ�
�@�D�m�d�s�̂b���A�܂���C++���g���p����������̑���M�������Ȃ��B
������i�̎d�l���@�@�@�@�@���@PC���\�t�g�iVC#�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@PC���\�t�g�iVC++)
�@�E�p�\�R�����́D�m�d�s�̂b���A�܂���C++�Ƃ��A�q�r232�b�V���A���ʐM��p���o�h�b18�e4550�ƕ�����̑���M�������Ȃ��B
�@�E�o�h�b���̃R���{�{�b�N�X�ɂ��炩���߉��L�̕������Z�b�g���Ă����{�^�����N���b�N����ƑI������Ă���������𑗐M����B
�@�@���M����镶���̍Ō���ɂ́f�����f�t������B
�@�@�o�h�b���ł͂����̕��������M�����珊��̕�������o�b���ɕԐM����B
�@�@�@�@�@Oda�@�@�@�@ �@���@Nobunaga
�@�@�@�@�@Toyotomi�@�@���@Hideyoshi
�@�@�@�@�@Tokugawa �@���@Ieyasu
�@�@�@�@�@Tanaka�@ �@�@���@Pardon?
�@�E�@PIC���ł͎�M�����A���M�������t���ɕ\������B
�@�E�@PC���ł���M�������e�L�X�g�{�b�N�X�ɕ\������B
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F4550���������ꍇ�̉�H�}���ȉ��Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
���@��CCS�ҁ�
PIC���̃v���O�������ȉ��Ɏ����܂��BPC���̃v���O�����́@PC���v���O�����iC#�̏ꍇ�j�APC���v���O�����iC++�̏ꍇ�j��
�@�Q�Ɗ肢�܂�
�@���v���O�����၄
/*
------------------------------------------------------------------
< �\��>
�@PC�iC# .NET )�@���@RS232C�@�@���@PIC18F4550�@�{�@16�����L�����N�^�t��
--------------------------------------------------------------------
�@
*/
#include "18f4550.h"
#include "string.h"
#use delay(clock=20000000) // 20MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int i = 0;
char buf[20];
char Oda[] = "Oda";
char Nobunaga[] = "Nobunaga";
char Toyotomi[] = "Toyotomi";
char Hideyoshi[] = "Hideyoshi";
char Tokugawa[] = "Tokugawa";
char Ieyasu[] = "Ieyasu";
char Tanaka[] = "Tanaka";
char Pardon[] = "Pardon?";
char* str;
void LCD()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Oda) == 0)str = Nobunaga;
else if(strcmp(buf,Toyotomi) == 0) str = Hideyoshi;
else if(strcmp(buf,Tokugawa) == 0) str = Ieyasu;
else str = Pardon;
printf(str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,buf); //�@���M����Ă��Ă����������t���̂P�s�ڂɈꊇ�\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
printf(lcd_data,str); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main(){
set_tris_c(0b10010000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Open COM port !!");
delay_ms(1000); //
while(1)
{
LCD();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//**************************************************************************************************************
//**************************************************************************************************************
//�ȉ��@�b18�R���p�C����
/*
PC-PIC�ԁ@RS232C�ʐM
�@�@��M�@�F�@��M�������ݕ���
�@�@PC�@�F�@N.NET
�@�@PIC�@�F�@PIC18F4550�@�t���t
*/
#include <p18f4550.h>
#include <stdlib.h>
#include "string.h"
#include <usart.h>
#include <stdio.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config FOSC = HS // f=20MHz
#pragma config WDT = OFF
#pragma config LVP = OFF
char buf[20]; // �^�C�v���������p�̃��W�X�^
int i = 0;
char buf[20];
char buf2[20];
char Oda[] = "Oda";
char Nobunaga[] = "Nobunaga";
char Toyotomi[] = "Toyotomi";
char Hideyoshi[] = "Hideyoshi";
char Tokugawa[] = "Tokugawa";
char Ieyasu[] = "Ieyasu";
char Tanaka[] = "Tanaka";
char Pardon[] = "Pardon?";
char* str;
void RS232(void);
void lcd_printf(char* strx) //�t���\���⏕��
{
while(*strx) //������I�[�� '\0'�����o����܂�
{
lcd_data(*strx); //�@�P�����\��
strx++;
}
}
#pragma code low_vector=0x18 //��ʃ��x��������
void low_interrupt (void)
{
_asm GOTO RS232 _endasm
}
#pragma code
#pragma interruptlow RS232
void RS232() //�@��M�����݊�
{
char Buffer[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* str;
PIR1bits.RCIF = 0; //PIR1 ���W�X�^��RCIF�r�b�g�i��M�t���O�j���N���A
buf[i] = getcUSART(); //��M�f�[�^��ǂݍ���
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Oda) == 0)str = Nobunaga;
else if(strcmp(buf,Toyotomi) == 0) str = Hideyoshi;
else if(strcmp(buf,Tokugawa) == 0) str = Ieyasu;
else str = Pardon;
printf("%s",str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
lcd_printf(&buf[0]); //�P�s�ڂɎ�M������\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
lcd_printf(&str[0]); //�@���M����Ă��Ă����������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main()
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
TRISC = 0b10111111; //RC7(RX)�F input mode RC6(TX): output mode
OpenUSART( USART_TX_INT_OFF & //���M�����ݑ��M�FOFF
USART_RX_INT_ON & //�����ݎ�M�FON
USART_ASYNCH_MODE & //���������ʐM���[�h
USART_EIGHT_BIT & //�f�[�^���F�W�r�b�g
USART_CONT_RX & //�A����M���[�h
USART_BRGH_HIGH, //�{�[���[�g�FHIGH�`�����x���[�h spbrg=129�@
//bau rate = Fosc/(128*(spbrg + 1))
129 ); // = 20000000/(16*(129 + 1)) = 9615.4 bps
// error rate = (9615.4-9600)/9600 = 0.0016
Delay10KTCYx(25);//50msec�t�������オ���҂@ 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"Com Port"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
RCONbits.IPEN = 0; //�����ݗD�揇�ʐ���FOFF�@�iRCON ���W�X�^��IPEN�r�b�g = 0)
INTCONbits.GIE = 1; //�S��������
INTCONbits.PEIE = 1; //���Ӌ@�\�̊����ݗL��
while(1)
{
}
CloseUSART();
return 0;
}
//************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�����s���ʁ�
���@������̑���M�i�DNET�@�`�@PIC�ԁ@�p��������M�j�@��C30�ҁ@PIC24F��
�D�m�d�s��VC++���g���p����������̑���M�������Ȃ��B
������i�̎d�l���@�@�@�@���@PC���\�t�g�iVC++)
�@�E�p�\�R�����́D�m�d�s��VC++�Ƃ��A�q�r232�b�V���A���ʐM��p���o�h�b24F�Ɖp����������̑���M�������Ȃ��B
�@�E�o�b���̃R���{�{�b�N�X�ɂ��炩���߉��L�̕������Z�b�g���Ă����{�^�����N���b�N����ƑI������Ă���������𑗐M����B
�@�@���M����镶���̍Ō���ɂ́f�����f�t������B
�@�@�o�h�b���ł͂����̕��������M������ȉ��̕�������o�b���ɕԐM����B
�@�@�@�@�@Sakamoto�@ �@���@Ryouma
�@�@�@�@�@Saigou�@�@�@�@ ���@Takamori
�@�@�@�@�@Katsura �@�@�@ ���@Kogorou
�@�@�@�@�@���̑��@ �@ �@���@Pardon?
�@�E�@PIC���ł͎�M�����A���M�������t���ɕ\������B
�@�E�@PC���ł���M�������e�L�X�g�{�b�N�X�@�y�у��X�g�ɕ\������B
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F4550���������ꍇ�̉�H�}���ȉ��Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
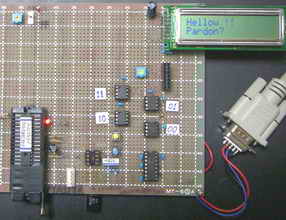
�@���v���O�����၄
//RS232C ����M�i���荞�݂Ȃ��j
//�@PC�|PIC�@�ԁ@�@�@�@�@PIC24FJ64GA002
#include "p24FJ64GA002.h"
#include <stdio.h>
#include <uart.h>
#include "1lcd_lib_C30.h"
#include "1lcd_lib_c30.c"
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
FNOSC_PRI & //�O�t�����U�q20MHZ�@PLL�Ȃ��@�@���@�V�X�e���N���b�N�F20MHZ
POSCMOD_HS //���U��H���[�h�@Oscillator Selection:�@ HS�@�i�O�t�����U��H�@���U���g�����x���FHS�j
)
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Takamori[] = "Takamori";
char Katsura[] = "Katsura";
char Kogorou[] = "Kogorou";
char Sakamoto[] = "Sakamoto";
char Ryouma[] = "Ryouma";
char Pardon[] = "Pardon?";
char* str;
char Space = ' ';
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/2000*N);
}
void LCD() //��M���t���\��
{
while(!DataRdyUART1()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART1();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Sakamoto) == 0)str = Ryouma;
else if(strcmp(buf,Saigou) == 0) str = Takamori;
else if(strcmp(buf,Katsura) == 0) str = Kogorou;
else str = Pardon;
printf(str); //�@�ԐM���@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear(); //�S����
lcd_str(&buf[0]); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s%c",str,Space); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main()
{
CLKDIV = 0; // set 1:1
AD1PCFG = 0xFFFF; // �|�[�gA�S�f�B�W�^���Ɏw��//ANx�̃|�[�g���ׂĂɑ��ĕK�{
TRISB = 0b0000000000001000; // �|�[�gB�@ RB3:RX�͓��͂� �A���̑�RB5�FSDA�ARB6�FSCL���͏o�͂ɐݒ�
// UART1�s�����t�@���}�b�s���O
RPINR18bits.U1RXR = 3; // UART1 RX to RP3
RPOR1bits.RP2R = 3; // UART1 TX to RP2
/// UART1�����ݒ�@9600bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
U1BRG = 64; // 9600bps at �V�X�e���N���b�N20MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 20000000/2/16/9600 - 1 = 64.1 ���@64)
U1MODE = 0b1000100000000000; // UART1�����ݒ� //U1MODE���W�X�^�ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ� //U1STA���W�X�^�ݒ�
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"RS232C Start !!%c",Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
while(1)
{
LCD();
}
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����łɕύX�������̂ł��B
//*************************************************************************
#include "p24FJ64GA002.h"
#define Clock 20000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB1 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB0 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 2000000); // 1��sec�ɗv����E�F�C�g��
_50usec = (unsigned int)(Clock / 2000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 2000); // 1msec�ɗv����E�F�C�g��
// = Clock / 2000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
//----------------------------------------------------------------------------------------------------
//---------------------------------------------------------------------------------------------------
//-------------------------------------------------------------------------------------------------
//--------------------------------------------------------------------------------------------------
//RS232C ����M�i���荞�ݗL��j
//�@PC�|PIC�@�ԁ@�@�@�@�@PIC24FJ64GA002
#include "p24FJ64GA002.h"
#include <stdio.h>
#include <uart.h>
#include "1lcd_lib_C30.h"
#include "1lcd_lib_c30.c"
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
FNOSC_PRI & //�O�t�����U�q20MHZ�@PLL�Ȃ��@�@���@�V�X�e���N���b�N�F20MHZ
POSCMOD_HS //���U��H���[�h�@Oscillator Selection:�@ HS�@�i�O�t�����U��H�@���U���g�����x���FHS�j
)
int i = 0;
char buf[20];
char Buf[20];
char Saigou[] = "Saigou";
char Takamori[] = "Takamori";
char Katsura[] = "Katsura";
char Kogorou[] = "Kogorou";
char Sakamoto[] = "Sakamoto";
char Ryouma[] = "Ryouma";
char Pardon[] = "Pardon?";
char* str;
char Space = ' ';
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/2000*N);
}
void _ISR _U1RXInterrupt(void) //RS232C ��M������
{
IFS0bits.U1RXIF = 0; //��M�����݃t���O�N���A
while(!DataRdyUART1()); //UART�o�b�t�@�[�Ƀf�[�^������܂ł܂�
buf[i] = getcUART1();
if(buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Sakamoto) == 0)str = Ryouma;
else if(strcmp(buf,Saigou) == 0) str = Takamori;
else if(strcmp(buf,Katsura) == 0) str = Kogorou;
else str = Pardon;
printf(str); //�@�ԐM���@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear(); //�S����
lcd_str(&buf[0]); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"%s%c",str,Space); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main()
{
CLKDIV = 0; // set 1:1
AD1PCFG = 0xFFFF; // �|�[�gA�S�f�B�W�^���Ɏw��//ANx�̃|�[�g���ׂĂɑ��ĕK�{
TRISB = 0b0000000000001000; // �|�[�gB�@ RB3:RX�͓��͂� �A���̑�RB5�FSDA�ARB6�FSCL���͏o�͂ɐݒ�
// UART1�s�����t�@���}�b�s���O
RPINR18bits.U1RXR = 3; // UART1 RX to RP3
RPOR1bits.RP2R = 3; // UART1 TX to RP2
/// UART1�����ݒ�@9600bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
U1BRG = 64; // 9600bps at �V�X�e���N���b�N20MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 20000000/2/16/9600 - 1 = 64.1 ���@64)
U1MODE = 0b1000100000000000; // UART1�����ݒ� //U1MODE���W�X�^�ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ� //U1STA���W�X�^�ݒ�
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"RS232C Start !!%c",Space);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
SetPriorityIntU1RX(5);//RS232C��M������ON�@���x��5 //�������傫�����������ݗD��x��
EnableIntU1RX; //��M��������
while(1)
{
if(U1STAbits.OERR || U1STAbits.FERR)
{
U1STA &= 0xFFF0; //�I�[�o�[�����G���[�A�t���[�~���O�G���[�A�p���e�B�G���[�N���A
U1MODEbits.UARTEN = 0; //UARAT������
U1MODEbits.UARTEN = 1;
}
}
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����łɕύX�������̂ł��B
//*************************************************************************
#include "p24FJ64GA002.h"
#define Clock 20000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB1 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB0 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 2000000); // 1��sec�ɗv����E�F�C�g��
_50usec = (unsigned int)(Clock / 2000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 2000); // 1msec�ɗv����E�F�C�g��
// = Clock / 2000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@�����s���ʁ�
| �@�@�@ |
PC����� |
PIC���t�����
1�s�ځF�@��M����
�Q�s�ځF�@�ԐM���� |
| �@�@�@ |
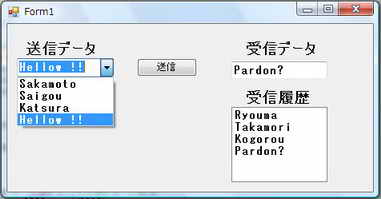
�@
��L�_�C�A���O�͈ȉ��̏��ԂŃR���{�{�b�N�X�̑��M�f�[�^��
�����I�����āA���M�������̂��̂ł��B
�@�@�@Sakamoto
�@�A�@Saigou
�@�B�@katusra
�@�C�@Hellow !! |
 |
| �@�A |
 |
| �@�B |
 |
| �@�C |
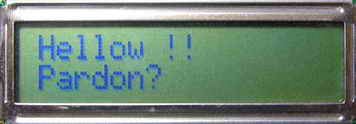 |
�i1�P�j������̑���M�i�D�m�d�s�@�`�@�o�h�b�ԁ@�}���`�X���b�h�ҁ@�����̑���M�@�j��CCS�ҁ��@���b18�ҁ�
�@�D�m�d�s�̂b���A�܂���C++���g�������i�V�t�gJIS�j������̑���M�������Ȃ��B
������i�̎d�l���@�@�@�@�@���@PC���\�t�g�iVC#)
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@PC���\�t�g�iVC++�j
�@�E�p�\�R�����́D�m�d�s�̂b���A�܂���C++�Ƃ��A�q�r232�b�V���A���ʐM��p���o�h�b18�e4550�ƕ�����̑���M�������Ȃ��B
�@�E�o�b���̃R���{�{�b�N�X�ɂ��炩���߉��L�̕������Z�b�g���Ă����B���M�{�^�����N���b�N���đI������Ă���������𑗐M����B
�@�@���M����镶���̍Ō���ɂ́f�����f�t������B
�@�@�o�h�b���ł͂����̕��������M������A�ȉ��ɒ�߂���������o�b���ɕԐM����B
�@�@�@�@�@�D�c�i�D�F0x9044�@�c�F0x9363�j�@�@�@�@ �@���@0x904D�i�M�j�@�@0x92B7�i���j
�@�@�@�@�@�L�b�i�L�F0x964C�@�b�F0��9062�j�@�@�@�@�@���@0x8F47�i�G�j�@�@0��8B67(�g)
�@�@�@�@�@����i���F0x93BF�@��F�O��90EC�j�@�@�@ �@���@0��89C6�i�Ɓj�@�@0x8D4E�i�N�j
�@�@�@�@�@�c���@�@�@ �@�@���@Pardon?
�@�E�@PIC���ł͎�M�������P�U�i���\���Ŏ�M�����@�y�ё��M�������t���ɕ\������B
�@�E�@PC���ł́A��M�����������Ńe�L�X�g�{�b�N�X�ɕ\������B
�@�@�@
�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC18F4550���������ꍇ�̉�H�}���ȉ��Ɏ����܂�
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄�@CCS��
/*
------------------------------------------------------------------
< �\��>
�@PC�iC# .NET )�@���@RS232C�@�@���@PIC18F4550�@�{�@16�����L�����N�^�t��
--------------------------------------------------------------------
�@
*/
#include "18f4550.h"
#include "string.h"
#use delay(clock=20000000) // 20MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int i = 0;
char buf[20];
char Oda[10]; //�D�c�@�F�@�D�m�V�t�gJIS�n9044�@�@�c�m�V�t�gJIS�n9363
char Nobunaga[10]; //�M���@:�@�M�m�V�t�gJIS�n904D �@���m�V�t�gJIS�n92B7
char Toyotomi[10]; //�L�b�@�F�@�L�m�V�t�gJIS�n964C�@�@�b�m�V�t�gJIS�n9062
char Hideyoshi[10]; //�G�g�@�F�@�G�m�V�t�gJIS�n8F47�@�@�g�m�V�t�gJIS�n8B67
char Tokugawa[10]; //����@�F�@���m�V�t�gJIS�n93BF�@�@��m�V�t�gJIS�n90EC
char Ieyasu[10]; //�ƍN�@�F�@�Ɓm�V�t�gJIS�n89C6�@�@�N�m�V�t�gJIS�n8D4E
char Tanaka[10]; //�c��
char Pardon[10];
char Hellow[] = "Hellow";
char* str;
void LCD()
{
buf[i] = getc();
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Oda) == 0)str = Nobunaga;
else if(strcmp(buf,Toyotomi) == 0) str = Hideyoshi;
else if(strcmp(buf,Tokugawa) == 0) str = Ieyasu;
else str = Pardon;
printf(str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"%x%x %x%x",buf[0],buf[1],buf[2],buf[3]); //�@��M�������t���̂P�s�ڂɈꊇ�\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
printf(lcd_data,"%x%x %x%x",str[0],str[1],str[2],str[3]); //�@���M�������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main(){
set_tris_c(0b10010000);// �K�{ in = RC7 & RC4
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Open COM port !!");
//�D�c�@�F�@�D�m�V�t�gJIS�n9044�@�c�m�V�t�gJIS�n9363
Oda[0] = 0x90; //�D�m�V�t�gJIS�n9044
Oda[1] = 0x44;
Oda[2] = 0x93; //�c�m�V�t�gJIS�n9363
Oda[3] = 0x63;
Oda[4] = 0x00;
//�M���@:�@�M�m�V�t�gJIS�n904D �@���m�V�t�gJIS�n92B7
Nobunaga[0] = 0x90; //�M�m�V�t�gJIS�n904D
Nobunaga[1] = 0x4D; //
Nobunaga[2] = 0x92; //���m�V�t�gJIS�n92B7
Nobunaga[3] = 0xB7; //
Nobunaga[4] = 0x00;
//�L�b�@�F�@�L�m�V�t�gJIS�n964C�@�@�b�m�V�t�gJIS�n9062
Toyotomi[0] = 0x96; //�L�m�V�t�gJIS�n964C
Toyotomi[1] = 0x4C;
Toyotomi[2] = 0x90; //�b�m�V�t�gJIS�n9062
Toyotomi[3] = 0x62;
Toyotomi[4] = 0x00;
//�G�g�@�F�@�G�m�V�t�gJIS�n8F47�@�@�g�m�V�t�gJIS�n8B67
Hideyoshi[0] = 0x8F; //�@�G�m�V�t�gJIS�n8F47
Hideyoshi[1] = 0x47;
Hideyoshi[2] = 0x8B; //�g�m�V�t�gJIS�n8B67
Hideyoshi[3] = 0x67;
Hideyoshi[4] = 0x00;
//����@�F�@���m�V�t�gJIS�n93BF�@��m�V�t�gJIS�n90EC
Tokugawa[0] = 0x93; //���m�V�t�gJIS�n93BF�@
Tokugawa[1] = 0xBF; //
Tokugawa[2] = 0x90; //��m�V�t�gJIS�n90EC
Tokugawa[3] = 0xEC;
Tokugawa[4] = 0x00;
//�ƍN�@�F�@�@�Ɓm�V�t�gJIS�n89C6�@�@�N�m�V�t�gJIS�n8D4E
Ieyasu[0] = 0x89; //�Ɓm�V�t�gJIS�n89C6�@
Ieyasu[1] = 0xC6;
Ieyasu[2] = 0x8D; //�N�m�V�t�gJIS�n8D4E
Ieyasu[3] = 0x4E;
Ieyasu[4] = 0x00;
Pardon[0] = 'P';
Pardon[1] = 'a';
Pardon[2] = 'r';
Pardon[3] = 'd';
Pardon[4] = 'o';
Pardon[5] = 'n';
Pardon[6] = ' ';
Pardon[7] = '?';
Pardon[8] = '\0';
delay_ms(1000); //
while(1)
{
LCD();
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//----------------------------------------------------------------------------------------------------------
//�@C18��
/*
PC-PIC�ԁ@RS232C�ʐM
�@�@��M�@�F�@��M�������ݕ���
�@�@PC�@�F�@N.NET
�@�@PIC�@�F�@PIC18F4550�@�t���t
*/
#include <p18f4550.h>
#include <stdlib.h>
#include "string.h"
#include <usart.h>
#include <stdio.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config FOSC = HS // f=20MHz
#pragma config WDT = OFF
#pragma config LVP = OFF
char buf[20]; // �^�C�v���������p�̃��W�X�^
int i = 0;
char buf[20];
char buf2[20];
char Oda[10]; //�D�c�@�F�@�D�m�V�t�gJIS�n9044�@�@�c�m�V�t�gJIS�n9363
char Nobunaga[10]; //�M���@:�@�M�m�V�t�gJIS�n904D �@���m�V�t�gJIS�n92B7
char Toyotomi[10]; //�L�b�@�F�@�L�m�V�t�gJIS�n964C�@�@�b�m�V�t�gJIS�n9062
char Hideyoshi[10]; //�G�g�@�F�@�G�m�V�t�gJIS�n8F47�@�@�g�m�V�t�gJIS�n8B67
char Tokugawa[10]; //����@�F�@���m�V�t�gJIS�n93BF�@�@��m�V�t�gJIS�n90EC
char Ieyasu[10]; //�ƍN�@�F�@�Ɓm�V�t�gJIS�n89C6�@�@�N�m�V�t�gJIS�n8D4E
char Tanaka[10]; //�c��
char Pardon[10];
char Hellow[] = "Hellow";
char* str;
void RS232(void);
void lcd_printf(char* strx) //�t���\���⏕��
{
while(*strx) //������I�[�� '\0'�����o����܂�
{
lcd_data(*strx); //�@�P�����\��
strx++;
}
}
#pragma code low_vector=0x18 //��ʃ��x��������
void low_interrupt (void)
{
_asm GOTO RS232 _endasm
}
#pragma code
#pragma interruptlow RS232
void RS232() //�@��M�����݊�
{
char Buffer[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
char* str;
char strTemp[20];
PIR1bits.RCIF = 0; //PIR1 ���W�X�^��RCIF�r�b�g�i��M�t���O�j���N���A
buf[i] = getcUSART(); //��M�f�[�^��ǂݍ���
if( buf[i] == '\r') //�@Enter �L�[�������ꂽ�ꍇ
{
buf[i] = '\0';
if(strcmp(buf,Oda) == 0)str = Nobunaga;
else if(strcmp(buf,Toyotomi) == 0) str = Hideyoshi;
else if(strcmp(buf,Tokugawa) == 0) str = Ieyasu;
else str = Pardon;
printf("%s",str); //�@���M����Ă��Ă����������@������Ƃ���PC�Ɉꊇ���M
//�t���ɏo��
lcd_clear();//�@�t���I�[���N���A
sprintf(&strTemp,"%x%x %x%x",buf[0],buf[1],buf[2],buf[3]);//sprintf�̃o�O����@ff�������̑O�ɂɕ\�������
lcd_printf(&strTemp[0]);// ��M�������t���̂P�s�ڂɕ\���@�@�@
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
sprintf(&strTemp,"%x%x %x%x",str[0],str[1],str[2],str[3]);//sprintf�̃o�O����@ff�������̑O�ɂɕ\�������
lcd_printf(&strTemp[0]); //�@���M�������t���̂Q�s�ڂɈꊇ�\��
i = 0;
}
else //Enter �L�[�ȊO�������ꂽ�ꍇ
{
i++;
}
}
main()
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
TRISC = 0b10111111; //RC7(RX)�F input mode RC6(TX): output mode
OpenUSART( USART_TX_INT_OFF & //���M�����ݑ��M�FOFF
USART_RX_INT_ON & //�����ݎ�M�FON
USART_ASYNCH_MODE & //���������ʐM���[�h
USART_EIGHT_BIT & //�f�[�^���F�W�r�b�g
USART_CONT_RX & //�A����M���[�h
USART_BRGH_HIGH, //�{�[���[�g�FHIGH�`�����x���[�h spbrg=129�@
//bau rate = Fosc/(128*(spbrg + 1))
129 ); // = 20000000/(16*(129 + 1)) = 9615.4 bps
// error rate = (9615.4-9600)/9600 = 0.0016
Delay10KTCYx(25);//50msec�t�������オ���҂@ 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"Com Port"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
//�D�c�@�F�@�D�m�V�t�gJIS�n9044�@�c�m�V�t�gJIS�n9363
Oda[0] = 0x90; //�D�m�V�t�gJIS�n9044
Oda[1] = 0x44;
Oda[2] = 0x93; //�c�m�V�t�gJIS�n9363
Oda[3] = 0x63;
Oda[4] = 0x00;
//�M���@:�@�M�m�V�t�gJIS�n904D �@���m�V�t�gJIS�n92B7
Nobunaga[0] = 0x90; //�M�m�V�t�gJIS�n904D
Nobunaga[1] = 0x4D; //
Nobunaga[2] = 0x92; //���m�V�t�gJIS�n92B7
Nobunaga[3] = 0xB7; //
Nobunaga[4] = 0x00;
//�L�b�@�F�@�L�m�V�t�gJIS�n964C�@�@�b�m�V�t�gJIS�n9062
Toyotomi[0] = 0x96; //�L�m�V�t�gJIS�n964C
Toyotomi[1] = 0x4C;
Toyotomi[2] = 0x90; //�b�m�V�t�gJIS�n9062
Toyotomi[3] = 0x62;
Toyotomi[4] = 0x00;
//�G�g�@�F�@�G�m�V�t�gJIS�n8F47�@�@�g�m�V�t�gJIS�n8B67
Hideyoshi[0] = 0x8F; //�@�G�m�V�t�gJIS�n8F47
Hideyoshi[1] = 0x47;
Hideyoshi[2] = 0x8B; //�g�m�V�t�gJIS�n8B67
Hideyoshi[3] = 0x67;
Hideyoshi[4] = 0x00;
//����@�F�@���m�V�t�gJIS�n93BF�@��m�V�t�gJIS�n90EC
Tokugawa[0] = 0x93; //���m�V�t�gJIS�n93BF�@
Tokugawa[1] = 0xBF; //
Tokugawa[2] = 0x90; //��m�V�t�gJIS�n90EC
Tokugawa[3] = 0xEC;
Tokugawa[4] = 0x00;
//�ƍN�@�F�@�@�Ɓm�V�t�gJIS�n89C6�@�@�N�m�V�t�gJIS�n8D4E
Ieyasu[0] = 0x89; //�Ɓm�V�t�gJIS�n89C6�@
Ieyasu[1] = 0xC6;
Ieyasu[2] = 0x8D; //�N�m�V�t�gJIS�n8D4E
Ieyasu[3] = 0x4E;
Ieyasu[4] = 0x00;
Pardon[0] = 'P';
Pardon[1] = 'a';
Pardon[2] = 'r';
Pardon[3] = 'd';
Pardon[4] = 'o';
Pardon[5] = 'n';
Pardon[6] = ' ';
Pardon[7] = '?';
Pardon[8] = '\0';
RCONbits.IPEN = 0; //�����ݗD�揇�ʐ���FOFF�@�iRCON ���W�X�^��IPEN�r�b�g = 0)
INTCONbits.GIE = 1; //�S��������
INTCONbits.PEIE = 1; //���Ӌ@�\�̊����ݗL��
while(1)
{
}
CloseUSART();
return 0;
}
//************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�����쌋�ʁ�
�@�@�@
�@����M�����@
�i�V�t�gJIS) |
|
PC�� |
|
PIC��
�i��i�F��M�f�[�^�@�@���i�F���M�f�[�^�j |
�D�c�M��
�D�F0x9044
�c�F0x9363
�M�F0x904D
���F0x92B7 |
|
 |
|
 |
|
|
|
|
|
�L�b�G�g
�L�F0x964C
�b�F0��9062
�G�F0x8F47
�g�F0��8B67
|
|
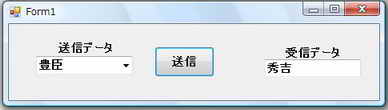 |
|
 |
|
|
|
|
|
����ƍN
���F0x93BF
��F�O��90EC
�ƁF0��89C6
�N�F0x8D4E |
|
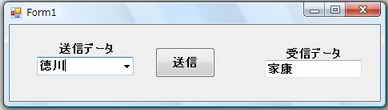 |
|
 |
(��)�@�t���\���łP�A�Q�o�C�g�ڂƂR�A�S�o�C�g�ڂ̊ԂɂP�������̋�����܂����A����͉t���\������ۊ����i�Q�o�C�g�j�f�[�^���킩��₷��
�@�@�@���邽�߂ɕ\������ő}�������ł��B���ۂ̑���M�ɂ����ẮA�S�o�C�g�f�[�^�̒��Ԃɋf�[�^�i�O��00�Ȃǁj�͂���܂���
�@�@�@�@
�i12�j�@�@RS232C����M�f�[�^�g�`�ϑ��i�@�DNET�@�|�@PIC�ԒʐM�j
�@�@�@PC��PIC�ԂŎ��ۂɑ���M�����RS232C�̐M�����r�b�g���x���Ŋϑ��������ʂ��Љ�܂��B�@��M����PIC��PIC24FJ64GA002�ł���
�@�@��M�Ȃ̂Ł@�ǂ�PIC�ł��悭�A���邢��10K�����x�̒�R����M�g�`�ϑ��̕��ׂƂ��Ăł��ϑ���OK�ł��B
�@�@�@���M����PC�̃v���O�����́@�����M����PC�v���O�����@���Q�Ɗ肢�܂�
�@������i�̎d�l��
�@�E�@PC����PIC�ɕ����f�[�^��������APC��TX�@�y��PIC��RX�̔g�`���ϑ�����
�@�E�@���M�f�[�^�͉��L�Ƃ���
�@�@�@�@�@�@A
�@�@�@�@�A�@B
�@�@�@�@�B�@C
�@�@�@�@�C�@AA
�@�E�@�f�[�^�̌`���͈ȉ��̂Ƃ���
�@�@�@�@�@�@�X�^�[�g�r�b�g�@�F�@1�r�b�g�Œ�
�@�@�@�@�A�@�f�[�^�r�b�g�@�@�F�@8�r�b�g�Œ�
�@�@�@�@�B�@�X�g�b�v�r�b�g�@�F�@1�r�b�g�Œ�
�@�@�@�@�C�@�p���e�B�@�@�@�@�F�@�Ȃ�
�@������i�̉�H�}���@�i�@���@��H�}��PDF�t�@�C���j
�@�@
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�����ʁ�
�@�@��PC�����M��ʁ�
�@�@�@A�AB�AC�AAA �̊e�����@�y�ѕ������RS232C�ő��M����PC�̉�ʂł��B
�@�@�����茋�ʁ�
�@�@�@���茋�ʂ��ȉ��Ɏ����܂�
��M����
�i16�i���\���j
�i�Q�i���\���j |
��M�p���X�����g�`�i�p���e�B�Ȃ��j
�㑤�FPIC��RX�[�q�g�`
�����FPC��TX�[�q�g�` |
A
�i0x41�j
�i0b01000001�j |
 |
B
�i0x42�j
�i0b01000010�j |
 |
C
�i0x43�j
�i0b01000011�j |
 |
AA
�i0x41 + 0x41�j
�i0b01000001+
�@ 0b01000001�j |
|
�f�W�^���I�V���F��ʁ@DS-5102
�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@