仭丂DA丂曄姺 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
 丂丂
丂丂
丂丂丂丂PIC偵偼傾僫儘僌揹埑傪弌椡偱偒傞億乕僩偼偁傝傑偣傫丅偟偨偑偭偰僨僕僞儖億乕僩偵庒姳偺僴乕僪傪捛壛偟偰
丂丂丂PIC偺僨僕僞儖怣崋傪傾僫儘僌怣崋乮揹埑乯偵曄姺偡傞昁梫偑偁傝傑偡丅愝寁偵嵺偟偳偺DA曄姺傪慖傇偺偐埲壓偺
丂丂丂傛偆側僠僃僢僋崁栚偑偁傝傑偡丅
丂丂丂丂丂丂仛丂曄姺懍搙
丂丂丂丂丂丂丂丂丂婥壏側偳偺傛偆偵昩儗儀儖偺墳摎偱傛偄偺偐丄僆乕僨傿僆偺傛偆偵悢廫KH倸掱搙傑偱偺墳摎偑昁梫側偺偐
丂丂丂丂丂丂仛丂傾僫儘僌揹埑偺曄姺儕僢僾儖
丂丂丂丂丂丂丂丂丂嵟廔揑偵傾僫儘僌揹埑寁偺恓傪怳傜偣傞傛偆側応崌偼恓傪怳傜偣傞儊僇婡峔偺姷惈傗恖娫偺栚偺姶搙側偳
丂丂丂丂丂丂丂丂丂偐傜偐側傝偺曄姺儕僢僾儖偼嫋梕偝傟傑偡丅丂堦曽丄傾僫儘僌弌椡傪墶幉傪帪娫幉偲偟偰PC偺儌僯僞傗婰榐巻
丂丂丂丂丂丂丂丂丂側偳偵昞帵偡傞応崌偼曄姺儕僢僾儖偼尩偟偔惂尷偝傟傑偡丅
丂丂丂丂丂丂仛丂暘夝擻丂
丂丂丂丂丂丂丂丂丂曄姺偡傋偒弌椡怣崋偺暘夝擻偼偄偔傜側偺偐丅丂埬奜侾俀價僢僩傗侾俇價僢僩傕昁梫側偔係價僢僩掱搙偱偨傞応崌傕
丂丂丂丂丂丂丂丂丂偁傞傕偺偱偡丅
丂丂丂丂丂丂仛丂弌椡怣崋僨乕僞偺庬椶
丂丂丂丂丂丂丂丂丂丒丂僔儕傾儖僨乕僞丂
丂丂丂丂丂丂丂丂丂丒丂僷儔儗儖僨乕僞
丂丂丂丂丂丂仛丂愱梡偺DA僐儞僶乕僞IC傪巊偆偐斲偐
丂丂丂丂丂丂丂丂丂丒丂愱梡DA僐儞僶乕僞IC傪奜晅偗偡傞
丂丂丂丂丂丂丂丂丂丒丂僆儁傾儞僾傗掞峈側偳偱僨傿僗僋儕乕僩偱惢嶌偡傞丅
愱梡偺DA僐儞僶乕僞IC傪巊偆傎偆偑娙扨偱偡偑丄応崌偵傛偭偰偼斈梡偺晹昳傪巊偭偰帺暘偱僨傿僗僋儕乕僩偱愝寁偟偨曽偑傛偄
応崌傕偁傝傑偡丅崱傪偲偒傔偔DA僐儞僶乕僞IC傕俆擭丄侾侽擭偡傞偲惗嶻拞巭偲側傞偐傕偟傟傑偣傫丅丂愝寁偵嵺偟偰偼惢昳庻柦丄廋棟偲
偄偭偨偙偲傕峫椂偟偰寛傔傞昁梫偑偁傝傑偡丅
丂丂丂
丂丂丂埲壓偵丂PIC偺弌椡怣崋傪DA曄姺偟偨椺傪徯夘偟傑偡丅
丂丂丂丂丂丂丂
丂丂丂丂乮侾乯丂僨傿僗僋儕乕僩偺僼傿儖僞偵傛傞PWM怣崋偺曄姺
丂丂丂丂乮俀乯丂僨傿僗僋儕乕僩偺僆儁傾儞僾壛廳壛嶼夞楬偵傛傞曄姺
丂丂丂丂乮俁乯丂僨傿僗僋儕乕僩偺偼偟偛夞楬偵傛傞曄姺乮僷儔儗儖擖椡乯
丂丂丂丂乮係乯丂僨傿僗僋儕乕僩偺偼偟偛夞楬偵傛傞曄姺乮僔儕傾儖擖椡乯
丂丂丂丂乮俆乯丂愱梡DA僐儞僶乕僞IC偵傛傞曄姺 乮 俴俿俠 侾係係俇 乯
丂丂丂丂乮俇乯丂愱梡DA僐儞僶乕僞IC偵傛傞曄姺 乮 俵俠俹 係俉俀俀 乯
乮侾乯丂僨傿僗僋儕乕僩偺僼傿儖僞偵傛傞PWM怣崋偺曄姺
丂
丂丂亙帋嶌昳巇條亜
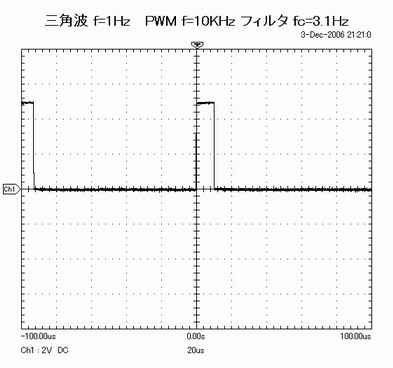
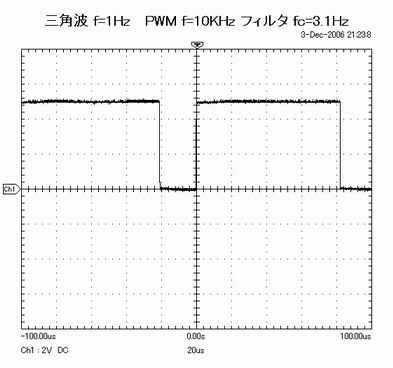
丂丂丂丒RA1僺儞傛傝廃攇悢侾侽KH倸偺PWM僠儑僢僷揹埑傪弌椡偺偡傞偙偲丅
丂丂丂丒捠棳棪偼侽乣侾侽侽亾傑偱侾亾僗僥僢僾偱捈慄揑偵曄壔偟丂廃婜侾Hz偱憹壛偲尭彮傪孞傝曉偡偙偲
丂丂丂丂偡側傢偪弌椡揹埑偺暯嬒抣偼廃婜侾Hz偺嶰妏攇偲側傞偙偲
丂丂丂丒偙偺僠儑僢僷弌椡傪僇僢僩僆僼廃攇悢俁丏侾Hz偺侾師儘乕僷僗僼傿儖僞偱儕僢僾儖傪彍嫀偡傞偙偲丅
丂丂丂丒峏偵僼傿儖僞儕儞僌屻偺弌椡傪僶僢僼傽乕傾儞僾偵愙懕偺偙偲丅
丂丂丂
丂丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC侾俇F俉俉傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳傕懡乆幨偭偰偄傑偡丅
丂亙僾儘僌儔儉椺亜
#include <16f88.h>
#use delay(clock=20000000)
#fuses HS,NOWDT,PUT,MCLR,BROWNOUT,NOLVP,NOCPD,NOWRT,NODEBUG,CCPB3,NOPROTECT,NOFCMEN,IESO,NOIESO
#use fixed_io(a_outputs=PIN_A1) //丂僺儞RA1傪弌椡儌乕僪偵屌掕丂仺丂懍搙傾僢僾
unsigned int i = 0;丂//
int j ;
main()
{
while(1)
{
i++; //捠棳棪偼侾亾僗僥僢僾偱曄壔偟偰偄傞
if(i >= 200) i = 0; //丂侾僒僀僋儖乮廃婜侾昩乯廔椆偟偨偺偱儕僙僢僩
//丂侾僒僀僋儖偼200偺僗僥僢僾偐傜峔惉偝傟偰偄傑偡
// 偡側傢偪丂忋徃儌乕僪偺100僗僥僢僾偲壓崀儌乕僪100僗僥僢僾偱峔惉偝傟偰偄傑偡
// 侾僗僥僢僾曄壔偡傞偲捠棳棪傕侾亾曄壔偟傑偡
if(i < 100) //嶰妏攇丂丗丂忋徃儌乕僪 PWM偺duty丂=丂侽丂仺丂侾侽侽亾
{ //捠棳棪偼侾亾僗僥僢僾偱曄壔偟偰偄傞
for(j = 0; j < 50; j++) //丂嶰妏攇偺廃婜傪侾Hz偵偡傞堊偵摨堦捠棳棪傪俆侽夞弌椡偡傞
{丂丂丂丂丂丂丂丂丂 //丂100兪sec丂亊丂50夞丂亊丂100僗僥僢僾乮捠棳棪偺僗僥僢僾悢乯亊丂2夞乮嶰妏攇忋徃丄壓崀乯
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂//丂丂=丂1000000兪sec丂=丂1000msec丂=丂1sec丂乮嶰妏攇偺廃婜乯丂
output_bit(PIN_A1,1);//丂i + (100 - i) = 100 兪sec (cnost) 仺丂10KH倸
delay_us(i); //
output_low(PIN_A1);
delay_us(100 -i );
}
}
else //丂嶰妏攇丂丗丂壓崀儌乕僪丂 PWM偺duty丂=丂侾侽侽亾丂仺丂侽亾
{
for(j = 0; j < 50; j++) //丂嶰妏攇偺廃婜傪侾Hz偵偡傞堊偵摨堦捠棳棪傪俆侽夞弌椡偡傞
{
output_high(PIN_A1); //( 200 -i ) + (i - 100) = 100兪sec 仺丂10KH倸
delay_us(200 - i);
output_low(PIN_A1);
delay_us(i - 100);
}
}
}
return 0;
}
亙摦嶌寢壥亜
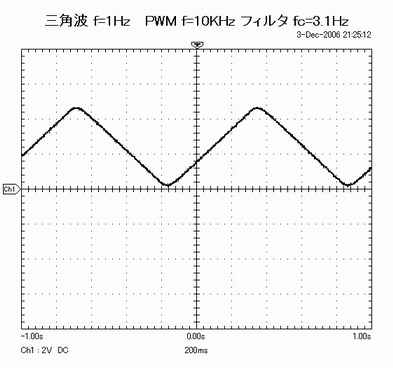
丂丂丒丂侾侽KH倸偺PWM弌椡偵懳偟偰丂fc 亖 俁丏侾Hz乮丂fc = 1/(2亊兾R亊C乯丂=丂1/乮2亊5.1K兌亊10兪F乯丂乯偲偄偆戝偒側
儘乕僷僗僼傿儖僞傪擖傟偨寢壥丂侾Hz偺嶰妏攇偵偼傎偲傫偳儕僢僾儖偼側偔側偭偰偄傑偡丅栚揑偵傛偭偰偼偙偺
曽朄偺DA曄姺偼偲偰傕埨壙偱娙扨側偺偱棙梡偱偒傞偲巚偄傑偡丅
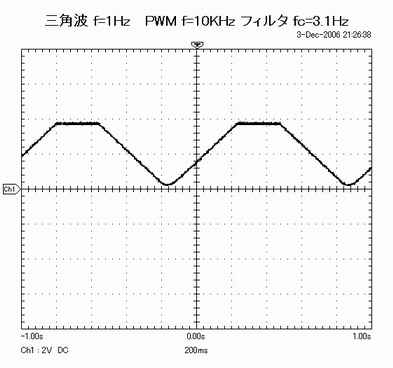
丂丂丒丂傾儞僾弌椡偱嶰妏攇偺忋晹偑僋儕僢僾偝傟偨偺偼揹尮揹埑偑俆V偱偁傞偨傔LM358偑朞榓偟偨偨傔偱偡丅
丂丂丂丂丂DA曄姺偲偼娭學偁傝傑偣傫偑傾儞僾弌椡攇宍偐傜俆V偱巊梡偟偨偲偒偺LM358偺朞榓揹埑偑俁丏俉V晅嬤偵偁傞
丂丂丂丂偙偲偑傢偐傝傑偡丅
|
傾儞僾擖椡揹埑乮LM358偺俁斣僺儞偺揹埑乯[2V/div] |
|
傾儞僾弌椡揹埑乮LM358偺侾斣僺儞偺揹埑乯[2V/div] |
| 0V |
 |
0V |
 |
|
[200msec/div] |
|
[200msec/div] |
|
|
|
PWM弌椡揹埑乮PIC偺RA1僺儞偺揹埑乯[2V/div] |
|
捠棳棪栺侾侽亾偺応崌 |
|
捠棳棪栺俆侽亾偺応崌 |
|
捠棳棪栺俉侽亾偺応崌 |
| 0V |
 |
0V |
 |
0V |
 |
|
[20兪sec/div] |
|
[20兪sec/div] |
|
[20兪sec/div] |
乮俀乯丂僨傿僗僋儕乕僩偺僆儁傾儞僾壛廳壛嶼夞楬偵傛傞曄姺
丂丂丂僨僕僞儖弌椡億乕僩偵廳傒傪晅偗僆儁傾儞僾偱壛嶼偡傞俉價僢僩偺DA僐儞僶乕僞偺椺傪徯夘偟傑偡丅偙偺曽幃偺DA
丂丂曄姺偼丄揹棳壛嶼宆DA曄姺曽幃偲屇偽傟傞偙偲傕偁傝傑偡丅
丂丂壛嶼掞峈偼E24偺拞偐傜掞峈俀杮埲撪偱偱偒傞埲壓偺抣傪巊梡偟傑偟偨丅
丂
| 億乕僩 |
RC俈 |
RC6 |
RC5 |
RC4 |
RC3 |
RC2 |
RC1 |
RC0 |
| 崌寁掞峈抣 |
俆K兌 |
侾侽K兌 |
俀侽K兌 |
係侽K兌 |
俉侽K兌 |
侾俇侽K兌 |
俁俀侽K兌 |
俇係侽K兌 |
| 掞峈偺峔惉 |
1侽K兌
丂丂//侾侽K兌 |
侾侽K兌 |
俀侽K兌 |
俀侽K兌
丂丂亄俀侽K兌 |
係俈K兌
丂丂亄俁俁K兌 |
侾俆侽K兌
丂丂亄侾侽K兌 |
俁侽侽K兌
丂丂亄俀侽K兌 |
俇俀侽K兌
丂丂亄俀侽K兌 |
丂
丂亙帋嶌昳巇條亜
丂丂丂丒丂C億乕僩偺RC俈傪嵟忋埵價僢僩MSB丄RC6傪戞俇埵價僢僩乧乧RC1傪戞侾埵價僢僩丄RC0傪嵟壓埵價僢僩LSB偲偟偰
丂丂丂丂丂俉價僢僩偺惍悢傪侽偐傜255傑偱弌椡偡傞
丂丂丂丒丂RC0偺廳傒傪侾偲偟偨応崌丄RC1,RC2丄乧乧RC7偺廳傒偑俀攞丄係攞丄侾俇攞乧乧侾俀俉攞偲側傞傛偆側僆儁傾儞僾
丂丂丂丂丂壛嶼掞峈傪慖戰偺偙偲
丂丂丂丒丂偙傟傜偺壛嶼掞峈傪椉揹尮偺僆儁傾儞僾偱壛嶼偟偰DA曄姺揹埑偲偡傞偙偲
丂丂丂丒丂惍悢偼侾侽msec枅偵侾偮曄壔偡傞偙偲丅侽偐傜俀俆俆傑偱憹壛偟偨屻偼俀俆俆偐傜侽傑偱尭彮偡傞偙偲丅埲壓偙傟傪孞傝
丂丂丂丂丂曉偡偙偲丅
丂丂
丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC侾俉F係俆俀傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
丂
丂亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳偑懡乆幨偭偰偄傑偡丅
丂亙僾儘僌儔儉椺亜
#include <18F452.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV42,NOPROTECT,NOLVP
#byte port_c=0x0F82 // port_c 傪丂傾僪儗僗斣崋0F82偺億乕僩C偵懳墳偝偣傞
//C億乕僩偑埲壓偺傛偆偵懳墳
//丂RC7仺MSB丂RC6仺戞俇價僢僩丂乧乧丂RC1仺戞侾價僢僩丂RC0仺LSB丂
#define UpMode 0 //丂憹壛儌乕僪
#define DownMode 1 // 尭彮儌乕僪
main()
{
short int Mode = UpMode;
set_tris_c(0); // C億乕僩傪偡傌偰弌椡儌乕僪偵屌掕
while(1)
{
if(Mode == UpMode) //丂憹壛儌乕僪
{
port_c++; //侾侽msec枅偵侾價僢僩偯偮255傑偱憹壛
delay_ms(10);
if(port_c == 255)Mode = DownMode;
}
else //尭彮儌乕僪
{
port_c--; //侾侽msec枅偵侾價僢僩偯偮0傑偱尭彮
delay_ms(10);
if(port_c == 0)Mode = UpMode;
}
}
return 0;
}
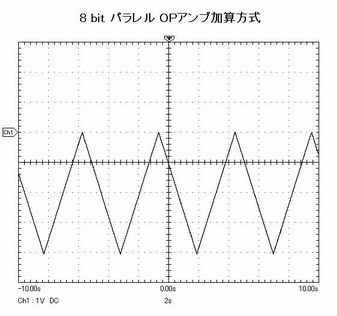
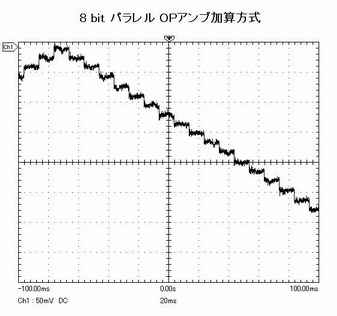
亙摦嶌寢壥亜
丂丂僆儁傾儞僾OP-侽俈偺弌椡揹埑傪壓婰偵帵偟傑偡
|
DA曄姺弌椡揹埑乮僆儁傾儞僾 OP - 侽俈 丂俇斣僺儞偺揹埑乯 |
| 丂 |
儅僋儘攇宍丂丂揹埑 [ 1 V/div ] |
|
儈僋儘攇宍丂丂丂揹埑 [ 50 mV/div ]丂 |
|
 |
0V |
 |
| 0V |
|
|
|
[2sec/div] |
|
[20msec/div] |
丂丂乮俁乯丂僨傿僗僋儕乕僩偺偼偟偛夞楬偵傛傞曄姺乮僷儔儗儖擖椡乯
丂丂丂丂愱梡偺AD丄DA曄姺 IC偺拞偱巊傢傟偰偄傞偼偟偛夞楬偵傛傞DA曄姺傪僨傿僗僋儕乕僩偱峔惉偟偨椺傪徯夘偟傑偡
丂丂
丂亙帋嶌昳巇條亜
丂丂丂丒丂D億乕僩偺RD俈傪嵟忋埵價僢僩MSB丄RD6傪戞俇埵價僢僩乧乧RD1傪戞侾埵價僢僩丄RD0傪嵟壓埵價僢僩LSB偲偟偰
丂丂丂丂丂俉價僢僩偺惍悢傪侽偐傜255傑偱弌椡偡傞
丂丂丂丒丂奺億乕僩偺廳傒偯偗偲偟偰R丄俀R偵傛傞偼偟偛乮Ladder乯夞楬傪峔惉偡傞
丂丂丂丒丂僶僢僼傽乕偲偟偰僆儁傾儞僾傪捛壛偡傞
丂丂丂丒丂惍悢偼侾侽msec枅偵侾偮曄壔偡傞偙偲丅侽偐傜俀俆俆傑偱憹壛偟偨屻偼俀俆俆偐傜侽傑偱尭彮偡傞偙偲丅埲壓偙傟傪孞傝
丂丂丂丂丂曉偡偙偲丅
丂丂
丂丂
丂丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC18F452傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳傕懡乆幨偭偰偄傑偡丅
丂丂
丂亙僾儘僌儔儉椺亜
#include <18F452.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV42,NOPROTECT,NOLVP
#byte port_d=0x0F83 // port_d 傪丂傾僪儗僗斣崋0F83偺億乕僩D偵懳墳偝偣傞
//D億乕僩偑埲壓偺傛偆偵懳墳
//丂RD7仺MSB丂RD6仺戞俇價僢僩丂乧乧丂RD1仺戞侾價僢僩丂RD0仺LSB丂
#define UpMode 0 //丂憹壛儌乕僪
#define DownMode 1 // 尭彮儌乕僪
main()
{
short int Mode = UpMode;
set_tris_d(0); // D億乕僩傪偡傌偰弌椡儌乕僪偵屌掕
while(1)
{
if(Mode == UpMode) //丂憹壛儌乕僪
{
port_d++; //侾侽msec枅偵侾價僢僩偯偮255傑偱憹壛
delay_ms(10);
if(port_d == 255)Mode = DownMode;
}
else //尭彮儌乕僪
{
port_d--; //侾侽msec枅偵侾價僢僩偯偮0傑偱尭彮
delay_ms(10);
if(port_d == 0)Mode = UpMode;
}
}
return 0;
}
亙摦嶌寢壥亜
|
DA曄姺弌椡揹埑乮僆儁傾儞僾 OP - 侽俈 丂俇斣僺儞偺揹埑乯 |
|
儅僋儘攇宍丂丂揹埑[1V/div] |
|
儈僋儘攇宍丂丂丂揹埑[50mV/div] |
|
 |
|
 |
|
| 0V |
|
0V |
|
|
[2sec/div] |
|
[20msec/div] |
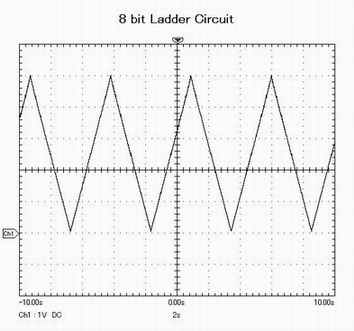
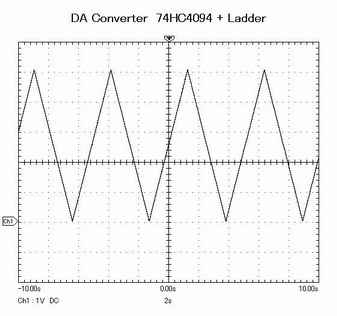
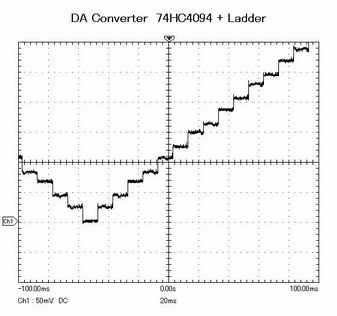
乮係乯丂僨傿僗僋儕乕僩偺偼偟偛夞楬偵傛傞曄姺乮僔儕傾儖擖椡乯
丂丂俉價僢僩偺僔僼僩儗僕僗僞IC丂俈係HC係侽俋係傪偮偐偭偰僔儕傾儖擖椡偺DA曄姺傪僨傿僗僋儕乕僩偱峔惉偟偨応崌偺
丂椺傪徯夘偟傑偡丅係侽俋係偼僔儕傾儖怣崋傪僷儔儗儖怣崋偵曄姺偡傞偲偒偵傛偔巊傢傟傑偡丅
丂丂DA曄姺屻偺弌椡揹埑偼摨條偵嶰妏攇偲偟傑偡丅丂
亙帋嶌昳巇條亜
丂丂丂丒丂係侽俋係偺Q俉傪嵟忋埵價僢僩MSB丄Q俈傪戞俇埵價僢僩乧乧Q侾傪戞侾埵價僢僩丄Q侽傪嵟壓埵價僢僩LSB偲偟偰
丂丂丂丂丂俉價僢僩偺惍悢傪侽偐傜255傑偱弌椡偡傞
丂丂丂丒丂廳傒偯偗偲偟偰R丄俀R偵傛傞偼偟偛乮Ladder乯夞楬傪峔惉偡傞
丂丂丂丒丂僶僢僼傽乕偲偟偰僆儁傾儞僾傪捛壛偡傞
丂丂丂丒丂惍悢偼侾侽msec枅偵侾偮曄壔偡傞偙偲丅侽偐傜俀俆俆傑偱憹壛偟偨屻偼俀俆俆偐傜侽傑偱尭彮偡傞偙偲丅埲壓偙傟傪孞傝
丂丂丂丂丂曉偡偙偲丅
丂丂
亙俈係HC係侽俋係偺巊偄曽亜乮徻嵶偼儅僯儏傾儖傪嶲徠偟偰偔偩偝偄乯
丂丂丂係侽俋係偼D宆僼儕僢僾僼儘僢僾偑俉屄捈楍偵愙懕偝傟偨峔惉偵側偭偰偄傑偡丅丂抂巕SI乮Serial In乯偺僨乕僞偑抂巕CK
丂丂乮Clock)偺擖椡偑Low偐傜Hi倗倛偵曄壔偡傞枅偵侾價僢僩偯偮弴師撪晹偺儗僕僗僞乮D宆僼儕僢僾僼儘僢僾乯偵撉崬傑傟偰
丂丂備偒傑偡丅丂撪晹儗僕僗僞偺抣偼抂巕ST乮Standby乯偑High偺帪偼偦偺傑傑弌椡偝傟丄Low偺帪偼弌椡偝傟偨抣偑曐帩
丂丂乮儂乕儖僪乯 偝傟傑偡丅抂巕OE乮Output Enable)偑High偺帪偼High丄Low偺抣偑弌椡偝傟丄Low偺応崌偼僴僀僀儞僺乕
丂丂僟儞僗忬懺偵 側傝傑偡丅丂埲忋偺偙偲偐傜PIC懁偐傜偺憲怣偼埲壓偺傛偆偵側傝傑偡丅
丂丂丂嘆丂ST傪Low偵偡傞丅
丂丂丂嘇丂CK傪Low偵偡傞丅
丂丂丂嘊丂SI偵僨乕僞偺MSB乮戞俈埵乯傪弌椡偡傞丅
丂丂丂嘋丂CK傪High偵偡傞丅偙偺僞僀儈儞僌偱儗僕僗僞Q1偵MSB偺抣偑撉崬傑傟傞
丂丂丂嘍丂CK傪Low偵偡傞丅
丂丂丂嘐丂SI偵僨乕僞偺傪戞俇埵傪弌椡偡傞丅
丂丂丂嘑丂CK傪High偵偡傞丅
丂丂丂嘒丂CK傪Low偵偡傞丅
丂丂丂嘓丂摨條偵丂戞俆埵乣戞侽埵乮LSB)傪弌椡偡傞丅
丂丂丂嘔丂LSB傪弌椡屻丄CK傪Low偵偟偨傜ST傪High偵偡傞丅偙偺帪Q8乣Q1偺儗僕僗僞偺抣偑摨帪偵弌椡偝傟傞丅
丂丂丂嘕丂ST傪Low偵偡傞丅弌椡偝傟偨抣偼儂乕儖僪偝傟偰偄傞丅師偺僨乕僞偑Q8乣Q1偵僙僢僩偝傟傞傑偱ST偼Low偵偟偰
丂丂丂丂丂丂偍偔丅
丂丂丂
丂丂丂丂丂丂
| 俈係HC係侽俋係 |
| 僞僀儈儞僌僠儍乕僩 |
僔僗僥儉恾 |
 |
 |
丂丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC18F452傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳傕懡乆幨偭偰偄傑偡丅
丂亙僾儘僌儔儉椺亜
// DA of 74HC4094
#include <18F452.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV42,NOPROTECT,NOLVP
#define UpMode 0 //丂憹壛儌乕僪
#define DownMode 1 // 尭彮儌乕僪
long int Output = 0;
short int Mode = UpMode;
void DAout(long int out) // DAout for 74HC4094
{
int i =0;
output_low(PIN_B2); // ST(Standby):Low 仺丂儂乕儖僪忬懺
output_low(PIN_B0); // CK:Low
for(i=0; i<8; i++) //丂憲怣僨乕僞傪MSB偐傜弴師侾價僢僩偯偮弌椡偡傞
{
output_bit(PIN_B1,(bit_test(out,7))); //out偺戞7價僢僩傪僠僃僢僋丂0側傜0傪1側傜1傪RB1偵弌椡偡傞
//丂RB1:SI(Serial In)
out = (out << 1); //丂憲怣屻侾價僢僩偩偗嵍偵價僢僩僔僼僩
output_high(PIN_B0); // CK:High
output_low(PIN_B0); //CK:Low
}
output_high(PIN_B2);// ST:High 仺丂儗僕僗僞抣弌椡
output_low(PIN_B2); // ST:Low 仺丂弌椡抣儂乕儖僪
}
main()
{
set_tris_d(0xff); // D億乕僩傪偡傌偰弌椡儌乕僪偵屌掕
while(1)
{
if(Mode == UpMode) //丂憹壛儌乕僪
{
Output++; //侾侽msec枅偵侾價僢僩偯偮255傑偱憹壛
delay_ms(10);
if(Output == 255)Mode = DownMode;
}
else //尭彮儌乕僪
{
Output--; //侾侽msec枅偵侾價僢僩偯偮0傑偱尭彮
delay_ms(10);
if(Output == 0)Mode = UpMode;
}
DAout(Output);
}
return 0;
}
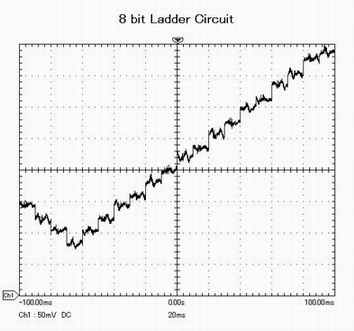
亙摦嶌寢壥亜
| DA曄姺弌椡揹埑乮僆儁傾儞僾 OP - 侽俈 丂俇斣僺儞偺揹埑乯 |
| 儅僋儘攇宍丂丂揹埑[V/div] |
儈僋儘攇宍丂丂揹埑[50mV/div] |
| |
 |
|
 |
| |
|
| 0V |
0V |
|
[2sec/div] |
|
[20msec/div] |
乮俆乯丂愱梡DA僐儞僶乕僞 IC偵傛傞曄姺乮 俴俿俠 侾係係俇 乯
丂丂丂丂DA僐儞僶乕僞IC偲偟偰儕僯傾僥僋僲儘僕乕偺LTC侾係係俇傪巊偭偨応崌偺椺傪徯夘偟傑偡丅
丂丂亙LTC侾係係俇丂彅尦亜
丂丂丂丒丂 僨儏傾儖DAC丄暘夝擻12價僢僩
丂丂丂丒丂僼儖僗働乕儖丂4.095V丂丂at丂4.5V乣5.5V扨堦揹尮
丂丂丂丒 儕僼傽儗儞僗撪憼
丂丂丂丒丂 LSB亖4.095V/4095亖1mV
丂丂丂丒丂 嵟戝DNL岆嵎丗0.5LSB
丂丂丂丒丂 5V摦嶌乮LTC1446乯丗ICC亖1000mA昗弨
丂丂丂丒丂3慄幃僇僗働乕僪壜擻側僔儕傾儖C儞僞僼僃乕僗
丂丂丂丒丂 SOP丄PDIP丂僷僢働乕僕偱嫙媼
丂亙帋嶌昳巇條亜
丂丂丂丒丂PIC偼侽偐傜係侽俋俆乮俀偺侾俀忔丂亖丂係侽俋俇乯傑偱偺惍悢傪侾偮偯偮曄壔偝偣LTC侾係係俇偵憲怣偡傞偙偲丅侽偐傜係侽俋俆
丂丂丂丂丂傑偱憹壛偝偣偨傜係侽俋俆偐傜侽傑偱尭彮偝偣傞偙偲丅
丂丂丂丒丂惍悢抣偺曄壔偼侾msec枅偵偍偙側偆偙偲丅
丂亙LTC侾係係俇偺巊偄曽亜乮徻嵶偼儅僯儏傾儖傪嶲徠偟偰偔偩偝偄乯
丂丂丂丒丂亄俆V偺扨堦揹尮偱巊梡偡傞応崌丄弌椡揹埑Vout偼傎傏埲壓偺幃偺抣偲側傝傑偡丅(拲)丂
丂丂丂丂丂丂丂Vout丂=丂4095丂亊丂Code/4095丂[ mV ]
Code丂丗丂弌椡惍悢抣乮僼儖僗働乕儖 4095乯
丂丂丂丂丂丂(拲)丂崅惛搙偵偮偐偆応崌偼VoutA偲VoutB弌椡傪嵎摦傾儞僾偱壛嶼偟偰偮偐偄傑偡丅
丂丂丂丒丂LTC侾係係俇傊偺僨乕僞憲怣偺僞僀儈儞僌僠儍乕僩傪壓婰偵帵偟傑偡
丂丂丂丂丂丂丂嘆丂CLK擖椡傪Low偵偟傑偡
丂丂丂丂丂丂丂嘇丂20nsec埲忋宱偭偰偐傜丂CS傪Low偵偟傑偡丅
丂丂丂丂丂丂丂嘊丂MSB乮戞11埵乯僨乕僞傪Din偵弌椡偟傑偡丅
丂丂丂丂丂丂丂嘋丂40nsec埲忋宱偭偰偐傜CLK傪High偵偟傑偡丅偙偺僋儘僢僋偑棫偪忋偑偭偨僞僀儈儞僌偱LTC侾係係俇偼僨乕僞傪
丂丂丂丂丂丂丂丂丂丂撉傒崬傒傑偡丅僋儘僢僋偺High丂Low偺帪娫偼偦傟偧傟40nsec埲忋昁梫偱偡
丂丂丂丂丂丂丂嘍丂CLK傪Low偵偟傑偡丅
丂丂丂丂丂丂丂嘐丂戞侾侽埵偺僨乕僞傪弌椡偟傑偡丅
丂丂丂丂丂丂丂嘑丂40nsec埲忋宱偭偰偐傜CLK傪High偵偟傑偡丅
丂丂丂丂丂丂丂嘒丂埲壓摨條偵LSB傑偱偙傟傪孞傝曉偟傑偡
丂丂丂丂丂丂丂嘓丂LSB傪弌椡偟偰CLK傪Low偵偟偨屻偵丄CS傪High偵偟傑偡丅
彯丄VoutB偵傕弌椡偡傞応崌偼丄VoutA偺LSB傪弌椡偟偨屻偵偡偖VoutB偺MSB偐傜弴師摨條偵Din偵弌椡
丂丂丂丂丂丂丂丂偟偰備偒傑偡丅
丂丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC18F452傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
丂
亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳傕懡乆幨偭偰偄傑偡丅
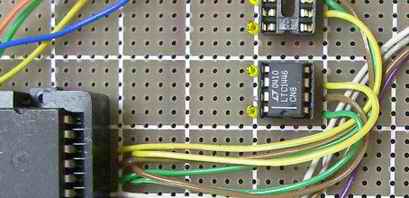
丂亙僾儘僌儔儉椺亜
#include <18F452.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV42,NOPROTECT,NOLVP
//WDT : 72 msec = 4*18
#define UpMode 0 //丂憹壛儌乕僪
#define DownMode 1 // 尭彮儌乕僪
long int Output;
short int Mode = UpMode;
void DAout(long int out){ // 僨乕僞偺僔儕傾儖曄姺仌憲怣娭悢
int i =0;
output_low(PIN_B3); // clock low RB3:clock
output_low(PIN_B5); // CS on RB5:CS
for(i=0; i<12; i++){ //丂憲怣僨乕僞傪MSB偐傜弴師侾價僢僩偯偮弌椡偡傞
output_bit(PIN_B4,(bit_test(out,11))); //out偺戞侾侾價僢僩傪僠僃僢僋丂0側傜0傪1側傜1傪RB4偵弌椡偡傞
//丂RB4:Din
out = (out << 1); //丂憲怣屻侾價僢僩偩偗嵍偵價僢僩僔僼僩
output_high(PIN_B3); // RB3:clock
output_low(PIN_B3);
}
output_high(PIN_B5);// CS off
}
#int_timer1
void interval() //丂侾msec枅偵妱崬傒敪惗
{
set_timer1(64911); // 256*256 -625 = 64911
// 0.05 usec * 4 * 8 * 625 = 1000 usec =1 msec
if(Mode == UpMode) //丂憹壛儌乕僪
{
Output++; //侾msec枅偵侾價僢僩偯偮4095傑偱憹壛
if(Output == 4095)Mode = DownMode;
}
else //尭彮儌乕僪
{
Output--; //侾msec枅偵侾價僢僩偯偮0傑偱尭彮
if(Output == 0)Mode = UpMode;
}
DAout(Output);
}
main(){
setup_timer_1(T1_INTERNAL |T1_DIV_BY_8);
set_timer1(64911);
enable_interrupts(INT_TIMER1);
enable_interrupts(GLOBAL);
while(1) // 妱崬傒傪懸偮
{
}
return 0;
}
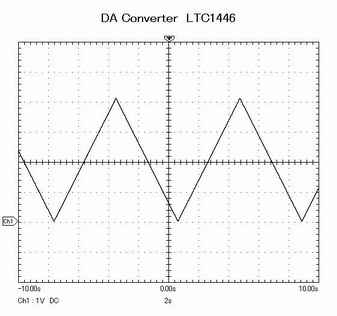
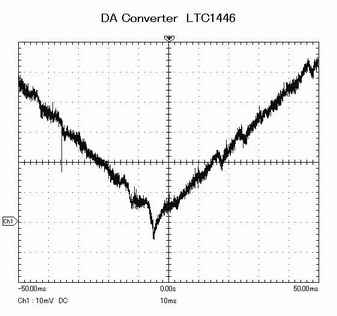
丂亙摦嶌寢壥亜
| 弌椡揹埑VoutA乮LTC1446偺俆斣僺儞偺揹埑乯 |
|
儅僋儘攇宍 [V/div] |
|
儈僋儘攇宍[10mV/div] |
| 丂丂 |
 |
丂丂丂丂 |
 |
| 0V |
| 0V |
|
[2sec/div] |
|
[10msec/div] |
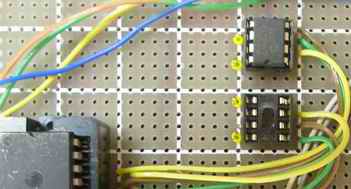
丂乮俇乯丂愱梡DA僐儞僶乕僞丂IC偵傛傞曄姺乮 俵俠俹係俉俀俀 乯
丂丂丂侾俀價僢僩DA僐儞僶乕僞IC偲偟偰儅僀僋儘僠僢僾僥僋僲儘僕乕偺俵俠俹係俉俀俀傪巊偭偨応崌偺椺傪徯夘偟傑偡丅MCP係俉俀俀偼
丂丂儅僀僋儘僠僢僾僥僋僲儘僕乕捈斕捠斕偐傜俀丏俁僪儖/屄掱搙偱峸擖偡傞偙偲偑偱偒傑偡丅
丂丂丂帋嶌昳巇條偼乮俆乯偺俴俿俠侾係係俇偲傑偭偨偔摨偠偱偡丅
丂丂亙MCP係俉俀俀丂彅尦亜
丂丂丂丒丂 僨儏傾儖DAC丄暘夝擻12價僢僩
丂丂丂丒丂僼儖僗働乕儖丂4.095V丂丂at丂4.5V乣5.5V扨堦揹尮
丂丂丂丒 儕僼傽儗儞僗撪憼
丂丂丂丒丂 LSB亖4.095V/4095亖1mV
丂丂丂丒丂 嵟戝DNL岆嵎丗亇0.俀LSB
丂丂丂丒丂 俀侽MHz傑偱壜擻側SPI僀儞僞乕僼僃乕僗
丂丂丂丒丂弌椡僎僀儞偑丂侾攞丄俀攞偺偄偢傟偐慖戰壜擻
丂丂丂丒丂掅徚旓揹椡梡偺僔儍僢僩僟僂儞婡擻晅
丂丂丂丒丂 SOP丄PDIP丂僷僢働乕僕偱嫙媼
丂
丂亙帋嶌昳巇條亜
丂丂丂丂丒丂PIC偼侽偐傜係侽俋俆乮俀偺侾俀忔丂亖丂係侽俋俇乯傑偱偺惍悢傪侾偮偯偮曄壔偝偣LTC侾係係俇偵憲怣偡傞偙偲丅侽偐傜係侽俋俆
丂丂丂丂丂傑偱憹壛偝偣偨傜係侽俋俆偐傜侽傑偱尭彮偝偣傞偙偲丅
丂丂丂丒丂惍悢抣偺曄壔偼侾msec枅偵偍偙側偆偙偲丅
丂
丂亙MCP 係俉俀俀偺巊偄曽亜乮徻嵶偼儅僯儏傾儖傪嶲徠偟偰偔偩偝偄乯
丂丂丂丂壓婰偺僞僀儈儞僌僠儍乕僩丄彂偒崬傒僐儅儞僪儗僕僗僞傊偺彂偒崬傒梫椞偵偟偨偑偭偰僷儖僗傪憲傝傑偡丅MCP 係俉俀俀
丂丂丂偺応崌LTC侾係係俇偵妑傋偰庒姳婡擻偑懡偄暘暋嶨偱偡丅
丂丂丂丂嘆丂CS抂巕傪High偐傜Low偵偟傑偡丅
丂丂丂丂嘇丂SDI抂巕偵丂VoutA偺僨乕僞偐VoutB偺僨乕僞偐愝掕價僢僩偺嵟弶偵巜掕乮弌椡乯偟傑偡丅
丂丂丂丂嘊丂僋儘僢僋擖椡SCK傪Low偐傜High偵偟傑偡丅偙偺僋儘僢僋偺棫偪忋偑傝偱MCP係俉俀俀偼SDI偺僨乕僞傪撉崬傒傑偡丅
丂丂丂丂丂丂丂埲壓摨條偵SCK偺僋儘僢僋偑Low偐傜High偵曄壔偟偨帪偵SDI偺僨乕僞偑撉傒崬傑偡
丂丂丂丂嘋丂師偺侾僋儘僢僋偺僨乕僞偼柍岠側僨乕僞偱偡丅
丂丂丂丂嘍丂師偵僎僀儞傪侾偵偡傞偐俀偵偡傞偐偺僨乕僞GA傪SDI偵弌椡偟傑偡丅
丂丂丂丂丂丂 MCP係俉俀俀偺弌椡揹埑Vout偼埲壓偺幃偱梌偊傜傟傑偡丅
丂丂丂丂丂丂丂丂Vout丂亖丂2.048丂亊丂G丂亊丂D値丂/丂4096丂丂丂丂乮at丂Vcc丂=丂5V乯
丂丂丂丂丂丂偡側傢偪丂G乮僎僀儞乯傪丂G丂=丂侾偵偡傞偺偐丂G丂=丂俀偵偡傞偺偐巜掕偡傞昁梫偑偁傝傑偡丅
丂丂丂丂嘐丂MCP係俉俀俀偼掅徚旓揹椡偺偨傔偺僗僞儞僶僀儌乕僪偡傞偙偲偑偱偒傑偡丅師偺僔儍僢僩僟僂儞僨乕僞SHDN傪High偵
丂丂丂丂丂丂丂偡傞偲Vout偼弌椡偝傟丄Low偵偡傞偲Vout偼僴僀僀儞僺乕僟儞僗偵側傝傑偡丅
丂丂丂丂嘑丂偙偺偁偲偼侾俀價僢僩偺Vout僨乕僞偺MSB偐傜弴師弌椡偟傑偡丅
丂丂丂丂嘒丂LSB傑偱弌椡偟偨傜丂CS傪Low偐傜High偵偟傑偡丅
丂丂亙帋嶌昳夞楬恾亜丂乮仺夞楬恾偺PDF僼傽僀儖乯
丂丂丂丂PIC18F452傪偮偐偭偨応崌偺夞楬恾傪埲壓偵帵偟傑偡丅
亙帋嶌昳奜娤亜 壓婰偺幨恀偵偼忋婰夞楬恾偵偼側偄丄傑偨杮僥乕儅偲娭學偺側偄晹昳傕懡乆幨偭偰偄傑偡丅
丂亙僾儘僌儔儉椺亜
// DA MCP4822
#include <18F452.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV42,NOPROTECT,NOLVP
//WDT : 72 msec = 4*18
#define UpMode 0 //丂憹壛儌乕僪
#define DownMode 1 // 尭彮儌乕僪
long int Output;
short int Mode = UpMode;
short int Chanel = 0; // 0:Chanel A
void DAout(long int out) // DAout
{
int i =0;
output_low(PIN_B3); // clock low
output_low(PIN_B5); // CS on
// 埲壓係價僢僩偑愝掕價僢僩
output_bit(PIN_B4,Chanel);//僠儍儞僱儖愝掕價僢僩丂丂丂侽:Chanel A 侾:Chanel B
// VoutA丂偵弌椡
output_high(PIN_B3); // clock
output_low(PIN_B3);
output_bit(PIN_B4,1);// dummy;
output_high(PIN_B3); // clock
output_low(PIN_B3);
output_bit(PIN_B4,0); // 僎僀儞愝掕價僢僩丂1丗 G = 1 丂 丂丂侽丗 G = 2
// G = 2; V = Data/4096 * 2.048*2 [V]
output_high(PIN_B3); // clock
output_low(PIN_B3);
output_bit(PIN_B4,1); //僔儍僢僩僟僂儞愝掕價僢僩 1丗丂弌椡僀僱僀僽儖丂丂丂丂侽丗丂僔儍僢僩僟僂儞
// output enable
output_high(PIN_B3); // clock
output_low(PIN_B3);
for(i=0; i<12; i++) //丂憲怣僨乕僞傪MSB偐傜弴師侾價僢僩偯偮弌椡偡傞
{
output_bit(PIN_B4,(bit_test(out,11))); //out偺戞侾侾價僢僩傪僠僃僢僋丂0側傜0傪1側傜1傪RB4偵弌椡偡傞
//丂RB4:Din
out = (out << 1); //丂憲怣屻侾價僢僩偩偗嵍偵價僢僩僔僼僩
output_high(PIN_B3); // clock
output_low(PIN_B3);
}
output_high(PIN_B5);// CS off
}
#int_timer1
void interval() //丂侾msec枅偵妱崬傒敪惗
{
set_timer1(64911); // 256*256 -625 = 64911
// 0.05 usec * 4 * 8 * 625 = 1000 usec =1 msec
if(Mode == UpMode) //丂憹壛儌乕僪
{
Output++; //侾msec枅偵侾價僢僩偯偮4095傑偱憹壛
if(Output == 4095)Mode = DownMode;
}
else //尭彮儌乕僪
{
Output--; //侾msec枅偵侾價僢僩偯偮0傑偱尭彮
if(Output == 0)Mode = UpMode;
}
DAout(Output);
}
main()
{
setup_timer_1(T1_INTERNAL |T1_DIV_BY_8);
set_timer1(64911);
enable_interrupts(INT_TIMER1);
enable_interrupts(GLOBAL);
while(1) // 妱崬傒傪懸偮
{
}
return 0;
}
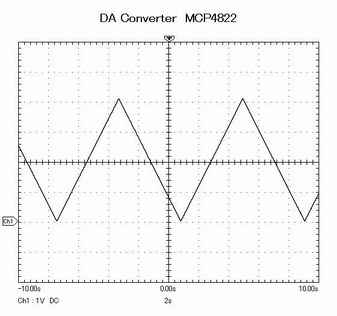
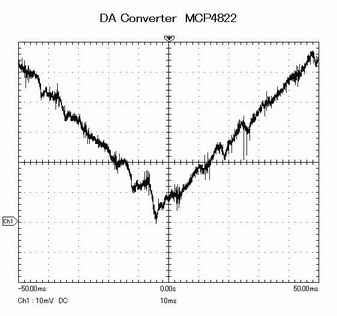
亙摦嶌寢壥亜
| 弌椡揹埑VoutA乮MCP係俉俀俀偺俉斣僺儞偺揹埑乯 |
|
儅僋儘攇宍[V/div] |
|
儈僋儘攇宍[10mV/div] |
| 丂 |
 |
丂 |
 |
| 0V |
0V |
|
[2sec/div] |
|
[10msec/div] |
丂丂丂丂丂