���@�O�t��SPI�C���^�[�t�F�[�X���i�̓ǂݏ����@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�@
�@�@�@
�@�@SPI�͕��i�Ԃ̒ʐM�ł悭�����Ă��܂��B�ȉ��ɂ��̎g�p����Љ�܂�
�i�P�j�P�Q�r�b�gA/D�R���o�[�^�ǂݍ��݁@�@�@��CCS�ҁ�
�i�Q�j�@2-�P�A�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁iSPI���W���[������o�́j�@��C30�@����PIC�ҁ� ��C30�@PIC24�ҁ�
�@�@ �@�@ 2-2�A�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁i�ėpI/O�|�[�g����o�́j�@��C30�@����PIC�ҁ�
�@�@�i�R�jSD�J�[�h�ǂݏ���
�@�@�@�@�@���@�ǂݏ����i�t�@�C���I�[�v���A���[�h�A���C�g�j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��C30�@dsPIC �ҁ��@�@��PIC32MX�ҁ�
�@�@�@�@�@���@�ǂݏ����iFIFO)�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��C30�@dsPIC�ҁ��@�@��PIC32MX�ҁ�
�@�@�@�@�@���@�ǂݏ����iEOF)�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ��C30�@dsPIC�ҁ��@�@��PIC32MX�ҁ�
�@�@�@�@�@���@AD�R���o�[�^�l�̓ǂݏ����@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��C30�@dsPIC�ҁ�
�@�@�@�@�@���@�����̘^���ƍĐ��@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��C30�@����PIC�ҁ�
�@�@�@�@���@WAV�^���t��MP3�v���[���[
�@�i�P�j�P�Q �r�b�g A/D �R���o�[�^�Ǎ��� �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@
�@�@�@�@�P�Q�r�b�gAD�R���o�[�^�Ƃ��Ắ@�}�C�N���`�b�v�e�N�m���W�[�Ђ�AD�R���o�[�^�@MCP�R�Q�O�S���g���܂����B
�@�@�@MCP�R�Q�O�S�̓}�C�N���`�b�v�e�N�m���W�[�Ђ��璼�ڒʔ́i��R�h��/�j�ōw�����邱�Ƃ��ł��܂��B�܂��A�W�`�����l��
�@�@�@�^�C�v��MCP�R�Q�O�W���H���d���̒ʔ́i�S�O�O�~/�j�ōw���ł��܂��B
�@
�@��MCP�R�Q�O�S�̎�v������
�@�@�@�@�E�@��ށ@�c�c�@������r�^AD�R���o�[�^�iSuccesive Approximation Anaogue-Digital Converter)
�@�@�@�@�E�@����\�@�c�c�@12�r�b�g
�@�@�@�@�E�@�ϊ����x�i�T���v�����O���[�g�j�@�c�c�@100Ksps ( at �d���d��=5V)�@(��)
�@�@�@�@�E�@�`�����l�����@�c�c�@�S�`�����l��
�@�@�@�@�E�@�d���d���͈́@�c�c�@2.7V�`5.5V
�@�@�@�@�E�@�p�b�P�[�W�@�c�c�@PDIP SOIC TSSOP
�@�@�@�@�@(��)�@������ (sampling per second)�FA/D�ϊ����ĂƂ肾����T���v�����O�f�[�^�iMCP�R�Q�O�S�̏ꍇ�P�Q�r�b�g�f�[�^�j��
�@�@�@�@�@�@�@�@�P�b�Ԃ�����̐�
�@�@�@�@�@
�@�@������i�d�l��
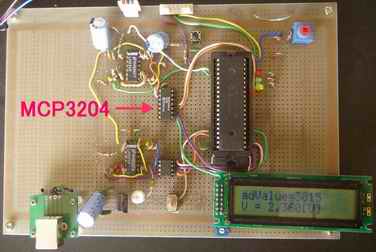
�@�@�@�@�@�E�@�d���͈́@-5V�@�`�@�{5V�̓d�����P�Q�r�b�gAD�R���o�[�^�œǍ��݂���
�@�@�@�@�@�E�@PIC�ɐڑ����ꂽ�t���̏�i�ɂ͓Ǎ���ł��鐮���̒l���@���i�ɂ͑���d�����@V�i�{���g�j�ŕ\������
�@�@�@�@�@�E�@AD�R���o�[�^�̓Ǎ��y�щt���\����200msec���Ƀ^�C�}�����݂������Ă����Ȃ�
�@�@��MCP3204�̎g�������@�i�ڍׂ̓}�C�N���`�b�v�e�N�m���W�Ђ̃f�[�^�V�[�g���Q�Ƃ��Ă��������j
�@�@�@MCP3204�͕W����SPI�C���^�[�t�F�[�X��AD�R���o�[�^�ł��BA/D�ϊ����ꂽ�l��ǎ��菇�͈ȉ��̂悤�ɂȂ�܂��B�@
�@�@�@�@�@�@�@PIC�����MCP3204��CS�[�q��high��low�ɂ���B
�@�@�@�@�@�A�@PIC�����MCP3204��CLK�[�q��high��low�ɂ���B���ꂪ�X�^�[�g�r�b�g�ƂȂ�B
�@�@�@�@�@�@�@�@���A���̎���Din�[�q��high�̂܂܂ɂ��Ă����B
�@�@�@�@�@�B�@MCP3204��CLK�[�q�ւ̐M����low��high�ɂ���B���̃^�C�~���O��MCP3204�̓X�^�[�g�r�b�g��F�����܂��B
�@�@�@�@�@�C�@AD�ϊ��A���v���V���O���G���h�A���v�Ŏg���������A���v�Ŏg���������\�ɂ���������MCP3204��Din�[�q��
�@�@�@�@�@�@�@�@low/high�M�����o�͂��܂��BCLK�[�q��low��high�ɂ��܂��BMCP3240��Din�[�q����Ǎ��݂܂��B
�@�@�@�@�@�@�@�@��MCP3204��CLK��low��high�̃^�C�~���O��Din�̏���Ǎ��݂܂��B
�@�@�@�@�@�D�@�Â��R�r�b�g�łǂ̃`�����l������������MCP3204��Din�[�q�ɓǍ��܂��܂��B
�@�@�@�@�@�E�@�R�r�b�g�ڂ�Ǎ��܂��N���b�N��low��high�ɂȂ�������1.5�T�C�N���̊ԂɃf�[�^���z�[���h����T���v�����O��
�@�@�@�@�@�@�@�@�����Ȃ��܂��B
�@�@�@�@�@�F�@���̂��Ƃ̃N���b�Nlow�����������̂���Dout�[�q�o�͖͂����ȃf�[�^�ł��B
�@�@�@�@�@�G�@���̃N���b�N��low��high�̂���MCP3204��Dout�[�q�ɂ�A/D�ϊ����ꂽ�P�Q�r�b�g�f�[�^��MSB�iB11)��
�@�@�@�@�@�@�@�@�o�͂���Ă��܂��B�����PIC���œǂݍ��݂܂��B
�@�@�@�@�@�H�@���̂��ƃN���b�N��low��high�Ƃ���B10��Ǎ��݂܂��B�@�ȉ���������肩�����܂��B
�@�@�@�@�@�I�@LSB�iB0)�܂œǂݍ���@CS��low��high�ɂ��܂��B
�@�@�@�@�@�@�@�@���@MCP3204��CLK�[�q�ւ̓��̓N���b�N�͍ő�QMH���iClock Low Time(�ŏ�)=500nsec Clock High Time
�@�@�@�@�@�@�@�@�@�@�i�ŏ��j=500nsec)�@�ł��̂� �v���O�����v�̍ہA�N���b�N��Low�@Time�@/High Time���s�������ꍇ��
�@�@�@�@�@�@�@�@�@�@�E�G�C�g�������Ȃ��K�v������܂��B
�@�@�@
�@�@������i��H�}���@�@�i����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�T�O���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B����d���͈͂�-5���`+5V�Ȃ̂�-5V���x���V�t�g����
�@�@�@����OP�A���v�ŋɐ��]�����A�܂��A���v�Q�C��1/2�ɂ��Ă���MCP3204�œǍ��ނ悤�ɂ��Ă��܂��B
�@�@�@�@MSSP�͎g�p���Ȃ��ň�ʂ�I/O�|�[�g�̃��[�h�Œ��ړǏ������Ă��܂��B
 �@
�@
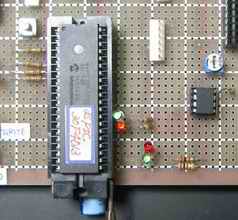
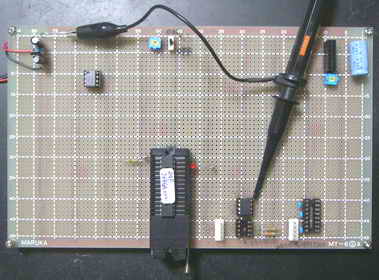
������i�O�ρ��@���L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂��B�@�@�@�@
 �@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�ȉ��̃v���O������̒��ɂ���t���\���퐧�䃉�C�u�����@1llcd_lib.c�́@��ՓN�炳�����v���ꂽ���̂ł�
�@���v���O�����၄�@
#include <18F4550.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV43,NOPROTECT,NOLVP
//////// Port define and link LCD library
#define mode 0
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
unsigned long int myAD(){
int i;
unsigned int config;
unsigned long int AdValue = 0;
//AD�J�n
output_high(PIN_C7);// Din(start bit): high(start)
output_low(PIN_C6);//CS:low
output_low(PIN_B1);//CLK: low
delay_cycles(3);// 600nsec ( = 50nsec �~�@4�@�~�@3 �T�C�N��)�E�F�C�g
output_high(PIN_B1);//CLK: high MCP3204���X�^�[�g�r�b�g��ǂݍ���
delay_cycles(3);// 600nsec ( = 50nsec �~�@4�@�~�@3 �T�C�N��)�E�F�C�g
// AD�R���o�[�^�̏����ݒ�i�V���O���G���h���������A�ǂ̃`�����l����ǂނ̂��j
config = 0b00001000; // bit3:single/diff bit -> single = 1�@�@�V���O���G���h�I��
// bit2:nosignificant -> 1
// bit1,bit0 chanel No set 00 -> ch0�@�@�`�����l���O��I��
i = 0;
for(i = 0; i < 4; i++){
output_bit(PIN_C7,bit_test(config,3-i));
output_low(PIN_B1);//CLK: low
delay_cycles(3);
output_high(PIN_B1);//CLK: high�@ MCP3204��config bit��ǂݍ���
delay_cycles(3);
}
// �Q�N���b�N�E�F�C�g�@--> MCP3204 AD�R���o�[�^�̒l���z�[���h���T���v�����O
i = 0;
for(i = 0; i<2; i++){
output_low(PIN_B1);//CLK: low
delay_cycles(4);
output_high(PIN_B1);//CLK: high
delay_cycles(4);
}
//�@MP3204���o�͂���12�r�b�g�f�[�^�������Ǎ���
i = 0;
for(i = 0; i < 12; i++){
output_low(PIN_B1); //CLK: low
delay_cycles(3);
output_high(PIN_B1);//CLK: high �@MP3204���f�[�^��Dout�ɏo��
delay_cycles(3);
if(input(PIN_B0) == 1) bit_set(AdValue,11-i); //Dout���@�P���O������
else bit_clear(AdValue,11-i);
}
delay_cycles(3);
output_high(PIN_C6);//CS:high
return AdValue;
}
#int_timer0 //�^�C�}�O������
interval(){
unsigned long int adValue;
float volt;
set_timer0(61630); // 256*256 -3906 = 61630
// 0.05 usec * 4 * 256 * 3906 = 200000 usec =200 msec
adValue = myAD();// AD�R���o�[�^���Ǎ��l�i12�r�b�g�����j MCP3204
if(adValue >= 4095) adValue = 4095;
if(adValue <= 0) adValue = 0;
volt = -((float)adValue - 2048)/2048 * 5 ; //AD�R���o�[�^���Ǎ��l��d���l�Ɋ��Z
//�@�t���\��
lcd_clear();
printf(lcd_data,"adValue=%4lu",adValue); //�@AD�R���o�[�^MCP3204���Ǎ��l�̕\��
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
printf(lcd_data,"V = %5.3f[V]",volt); //�d�����Z�l��\��
return 0;
}
main(){
setup_timer_0(RTCC_INTERNAL |RTCC_DIV_256);
set_timer0(61630);
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
enable_interrupts(INT_TIMER0);
enable_interrupts(GLOBAL);
while(1) //�@�����݂�҂�
{
output_high(PIN_C6); //�@CS:high
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
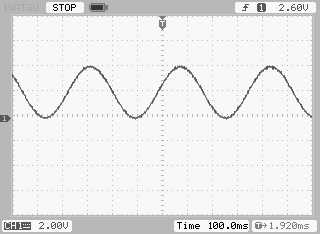
�@�@�@�����쌋�ʁ�
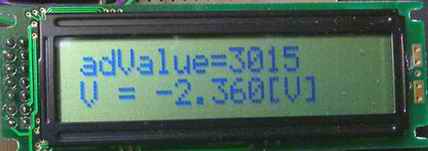
����d����-2.36V�����͂��ꂽ���̉t���\�������L�Ɏ����܂��B
�@
�i�Q�j�@�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁@�@�@�@������PIC�@C30�ҁ�
(�Q�|�P)�@SPI ���W���[�����g�p�����ꍇ
�@�@�@�@�}�C�N���`�b�v�e�N�m���W�[��D/A�R���o�[�^MCP4822��SPI�ʐM�Ő��䂵��D/A�ϊ��̗���Љ�܂��B
�@�@������i�̎d�l��
�@�@�E�@PIC�łP�x���̐����g�e�[�u�������A���̃f�[�^��200KH���ŃT���v�����O����SPI�ʐM��D/A�R���o�[�^
�@�@�@�@MCP4822�ɓ`������B
�@�@�E�@MCP4822�i�d���d��+5V�j����́A555Hz�i���j�AVp-p 4.096V�A����\�P�Q�r�b�g�̐����g�d�����o�͂���B
�@�@�@�@�@�@�@�@�i���j555Hz�@=�@200KH���@���@360
�@�@�@
�@������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
�@�@�@
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄�@
//********************************************************************************************************
//�@�O�t��DA�R���o�[�^MCP4822
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@SPI�ʐM�ɂ�鐳���g�o�́@�@�@�@�@�@�@�@�@�@�@�@
// �T���v�����O���g���F200KH���@�@�@�@�@�@�@�@�@�o�͐����g�@12bit�@555Hz�@�@�@�@�@����PIC30F4013
//********************************************************************************************************
// MPLAB��Link File
//�@�@�@�@Linler Script : p30f4013.gld
// Library File : libp30F4013-coff.a
#include <p30f4013.h>
#include <timer.h>
#include "math.h"
#include "spi.h"
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
_FOSC(CSW_FSCM_OFF & // �N���b�N��ւ��Ȃ��A�t�F�[���Z�C�t�N���b�N���j�^�Ȃ�
XT_PLL8 //�O�����U�q���g���@�~�@�|�X�g�X�P�[���F1�@�~�@PLL�F8�{�@�@���@10MH���@�~�@1 �~�@�@8�@=�@80MHz
);
_FWDT(WDT_OFF); //�E�H�b�`�h�b�N�^�C�}�FOFF
_FBORPOR(PBOR_ON & //�u���E���A�E�g���Z�b�g�@�\�FON
BORV_42 & //�u���E���A�E�g�d���F4.2V
PWRT_64 & //�p���[�I�����Z�b�g�^�C�}64msec
MCLR_EN //MCLR�@�\�FON
);
_FGS(CODE_PROT_OFF); //�R�[�h�v���e�N�g�FOFF
unsigned int Fre_Out = 1000; // �o�͎��g���@1KH��
unsigned int Fre_Sampling = 200000; //�T���v�����O���g��200KH��
unsigned int sinValue[360]; //sin�e�[�u���l�@RAM�e�ʂ����Ȃ��̂ő傫�Ȓl�i��1000�j���Ƃ�ƕs���Ȍ��ۂ��ł�
unsigned int angleValue = 0; //
float PAI = 3.1416;
int Led = 0;
//// SPI�̏����ݒ�p�����[�^ �N���b�N20MHz
unsigned int SPICONValue = FRAME_ENABLE_OFF & FRAME_SYNC_INPUT &
ENABLE_SDO_PIN & SPI_MODE16_ON & SPI_SMP_ON & SPI_CKE_OFF
& CLK_POL_ACTIVE_LOW &
MASTER_ENABLE_ON & SEC_PRESCAL_1_1 & PRI_PRESCAL_1_1;
unsigned int SPISTATValue = SPI_ENABLE & SPI_IDLE_CON &
SPI_RX_OVFLOW_CLR;
void _ISR _T1Interrupt(void) //5��sec���̊����ݔ���
{
LATDbits.LATD8 = 0; //CS = 0;
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
WriteSPI1(sinValue[angleValue] | 0b0001000000000000); //VoutA�ɃQ�C���Q�ŏo��
//MCP4822�ւ̏������݃R�}���h
//bit15�i�������݃��W�X�^�I���j�@�@ 1:VoutB�@�@ 0:VoutA
//bit14�i�\���j
//bit13�i�o�̓Q�C���I���j�@�@1:1�{�@�@�@0:2�{�@
//bit12�i�o�̓I�t����j�@�@1�F�o��ON�@�@0�F�o��OFF�@
//bit11�`bit0 �f�[�^�@�@MSB���珇�����M�����
angleValue++;
if(angleValue >= 360)angleValue = 0;
//1��sec delay�@�i�@Nop()0.05��sec�@�~20�� = 1��sec�@�j�@�@�@//�@0.2��sec�ȉ�NG
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
LATDbits.LATD8 = 1; //CS = 1�@�� CS�̗����オ��G�b�W��MCP4822�̏o�̓��W�X�^�ɑ��M�f�[�^�����b�`�����
}
void SinTable() //Sin �̃e�[�u���쐬
{
unsigned int i;
for(i = 0; i < 360; i++)
{
sinValue[i] = (unsigned int)(4095*(1 + sinf(2*PAI*i/360))/2); //sinf():�P���x�@�@vs�@�@sin():�{���x
}
}
int main(void)
{
TRISD = 0; //�|�[�gD���o�̓��[�h�ɐݒ�
TRISF = 0;
//�^�C�}�P�ݒ�
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_1 & //�v���X�P�[���@1/1
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
(unsigned int)(80000000/4/ 200000/1 - 1) // �T���v�����O���g��200KH��
);
//SPI�ʐM�ݒ�
OpenSPI1( //�@SPI1CON���W�X�^��SPI1STAT���W�X�^�̐ݒ�
FRAME_ENABLE_OFF & //�t���[������Ȃ�<Frame SPI support Enable/Disable:FRMEN>
FRAME_SYNC_INPUT & //�t���[�����䎞�̓��o�͕���<Frame Sync Pulse direction control:SPIFSD>
ENABLE_SDO_PIN & //SDO�s����ėp�s���Ƃ��Ăł͂Ȃ�SPI����p�Ƃ��Ďg�p <SDO Pin Control bit:DISSDO>
SPI_MODE16_ON & //����M�P�ʁF�P�U�r�b�g�@�i�W�r�b�g���@SPI_MODE16_OFF)<Word/Byte Communication mode:MODE16>
SPI_SMP_ON & //�f�[�^���̓T���v���t�F�[�Y�F�f�[�^�o�͎��Ԃ̏I�����ɓ��̓f�[�^���T���v������<SPI Data Input Sample phase:SMP>
SPI_CKE_OFF & //�N���b�N�G�b�W�I���FIDLE ��Ԃ���A�N�e�C�u�N���b�N��ԂɑJ�ڂ���G�b�W�ŃV���A���o�̓f�[�^���ω�CKE=0<SPI Clock Edge Select:CKE>
// SLAVE_SELECT_ENABLE_OFF &//SS �s���L����:SS�s���g�p����<SPI Slave Select enable:SSEN>
CLK_POL_ACTIVE_LOW &//�N���b�N�ɐ��I���r�b�g:�A�N�e�B�u���Low�iCKP=1�j<SPI Clock polarity select:CKP>
//SD�J�[�h�̓N���b�N�̗����オ��Ńf�[�^����荞�ށ@���@CKE=0 CKP=1
MASTER_ENABLE_ON & //�}�X�^�[���[�h�L����:�}�X�^�[���[�h�ɐݒ�<SPI Mode Select bit:MSTEN>
SEC_PRESCAL_1_1 & //�Q���v���X�P�[���I���F�@1�F1<Secondary Prescale select:SPRE2-SPRE0>
PRI_PRESCAL_1_1, //�P���v���X�P�[���I���F�@1�F1<Primary Prescale select : PRE1-PRE0>
//SPI�N���b�N���g����Fosc �~�@1/4�@�@���@�@�i�P���v���X�P�[���~�Q���v���X�P�[���j
//�@���@80MHz�@�~�@1/4�@���@�i 1 �~�@1�j�@���@20MHz
SPI_ENABLE & //SPI�L�������ݒ�F�@�L��<SPI Enable/Disable:SPIEN>
SPI_IDLE_CON & //�A�C�h�����̓���ݒ�F�@����<SPI Idle mode Operation:SPISIDL>
SPI_RX_OVFLOW_CLR); //�I�[�o�[�t���[�������t���O�N���A�F�N���A<Clear Receive Overflow Flag bit:SPIROV>
SinTable(); //Sin�̃e�[�u���쐬
ConfigIntTimer1( T1_INT_ON & T1_INT_PRIOR_5 ); //�^�C�}�P������ON�@�@�����݃��x���T�@
ConfigIntSPI1(SPI_INT_DIS & SPI_INT_PRI_6); //SPI������OFF
EnableIntT1; //��������
while(1)
{
}
CloseTimer1();
CloseSPI1();
return 0;
}
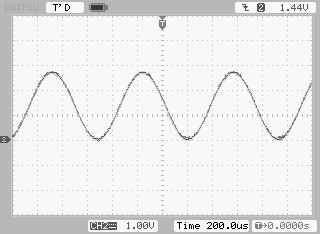
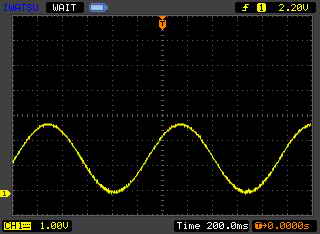
�����쌋�ʁ�
�@�@D/A�R���o�[�^ MCP4822��VoutA�i�W�ԃs���j�[�q�̏o�͓d���̔g�`���ȉ��Ɏ����܂��B
�@�@�@�@�@�o�͓d������
�@�@�@�@�@�@�@�E���g���@�F�@555Hz
�@�@�@�@�@�@�@�E����\�@�F�@12�r�b�g
�@�@�@�@�@�@�@�E�U���iVp-p�j�@�F�@4.096V
�@�@�@�@�@�@ �E�T���v�����O���g���@�F�@200KH���@�@�@�@�@�@
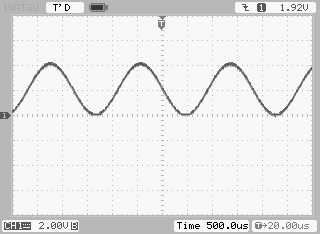 �i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�QA�j�@�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁@�@�@�@��PIC24�@C30�ҁ�
�@�@�@�@�@SPI ���W���[���Ƃ��āA�@�}�C�N���`�b�v�e�N�m���W�[��D/A�R���o�[�^MCP4822��SPI�ʐM�Ő��䂵��D/A�ϊ��̗���Љ�܂��B
�@�@������i�̎d�l��
�@�@�E�@PIC�łP�x���̐����g�e�[�u�������A���̃f�[�^��100KH���ŃT���v�����O����SPI�ʐM��D/A�R���o�[�^
�@�@�@�@MCP4822�ɓ`������B
�@�@�E�@MCP4822�i�d���d��+3.3V�j����́A277.5Hz�i���j�AVp-p 2.7V�A����\�P�Q�r�b�g�̐����g�d�����o�͂���B
�@�@�@�@�@�@�@�@�i���j277.5Hz�@=�@100KH���@���@360
������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
///************************************************************/
// SPI�ʐM�ɂ�鐳���g�o�́@�@�@�@�@�@�@�@�@�@�@�@
// �T���v�����O���g���F100KH���@�@�o�͐����g�@12bit�@277.5Hz�@ �@PC24FJ64GA002
//************************************************************/
#include "p24FJ64GA002.h"
#include <timer.h>
#include "math.h"
#include "spi.h"
#define Clock 32000000 // �P�ʂ�Hz�Ŏw��
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1( JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF )//�E�H�b�`�h�b�N�^�C�}�F�@OFF
_CONFIG2( IESO_OFF & // �Q���x�X�^�[�g�A�b�v�@�\�FOFF
FNOSC_FRCPLL & //��������RC���U�i8MHZ)��H�@�{�@4�{PLL�@���@32MH���i=�@8MHz�@�~�@4�j
FCKSM_CSDCMD & //�N���b�N�ؑւ�����FOFF�@�N���b�N���j�^�FOFF
OSCIOFNC_OFF & //OSCO/RC15 function�F�@OSCO or Fosc/2
IOL1WAY_OFF & //RP Register Protection�F�@Unlimited Writes To RP Registers
I2C1SEL_PRI & //I2C1 pins Select�F�@Use Primary I2C1 pins
POSCMOD_NONE) //���U��H���[�h�@Oscillator Selection:�@ Primary disabled
unsigned int sinValue[360]; //sin�e�[�u���l�@RAM�e�ʂ����Ȃ��̂ő傫�Ȓl�i��1000�j���Ƃ�ƕs���Ȍ��ۂ��ł�
unsigned int angleValue = 0; //
float PAI = 3.1416;
void _ISR _T1Interrupt(void) //10��sec���̊����ݔ���
{
LATBbits.LATB7 = 0; //CS = 0; �`�b�v�Z���N�g
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
WriteSPI1(sinValue[angleValue] | 0b0001000000000000); //VoutA�ɃQ�C���Q�ŏo��
//MCP4822�ւ̏������݃R�}���h
//bit15�i�������݃��W�X�^�I���j�@�@ 1:VoutB�@�@ 0:VoutA
//bit14�i�\���j
//bit13�i�o�̓Q�C���I���j�@�@1:1�{�@�@�@0:2�{�@
//bit12�i�o�̓I�t����j�@�@1�F�o��ON�@�@0�F�o��OFF�@
//bit11�`bit0 �f�[�^�@�@MSB���珇�����M�����
angleValue++;
if(angleValue >= 360)angleValue = 0;
//1��sec delay�@�i�@Nop()0.05��sec�@�~20�� = 1��sec�@�j�@�@�@//�@0.2��sec�ȉ�NG
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
LATBbits.LATB7 = 1; //CS = 1�@�� CS�̗����オ��G�b�W��MCP4822�̏o�̓��W�X�^�ɑ��M�f�[�^�����b�`�����
}
void SinTable() //Sin �̃e�[�u���쐬
{
unsigned int i;
for(i = 0; i < 360; i++)
{
sinValue[i] = (unsigned int)((1 + sinf(2*PAI*i/360))/2*4095*3.3/5); //sinf():�P���x�@�@vs�@�@sin():�{���x
//Vout = 2.048�~2�~Dn/4095�@�@Vout(max) = 4.096[V] ( > 3.3V�i�d���d���j�j�@�@�@4.096�~3.3/5�@=�@2.7V�@�i<�@�i3.3V���I�y�A���v�O�a�d��))
}
}
/// ���C����
int main(void)
{
TRISB = 0; //B�|�[�g���o�̓��[�h�ɐݒ�
CLKDIV = 0; //����FRC8MH���F�@�����Ȃ����� �����̃��W�X�^���I�Ƀ��Z�b�g���Ă����Ȃ���FRC����������Ă��邱�Ƃ�����i�H�j
RPOR2bits.RP5R = 8; //RB5(RPOR2���W�X�^��RP5�j�ɋ@�\8�iSCK1OUT�j������t����
RPOR3bits.RP6R = 7; //RB6�iRPOR3���W�X�^��RP6�j�ɋ@�\7�iSDO1)������t����
// �^�C�}�P�F�@�����@10 ��sec �T���v�����O���g���F100KH��
OpenTimer1
(
T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_1 & //�v���X�P�[���@1/1
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT, //�N���b�N���F�����N���b�N
159 //10*(32MHz/2MHz)=160 �@PR1�ݒ�l = 159 (=160-1)
);
//SPI�ʐM�ݒ� spi.h�Q�Ɓi\Program Files\Microchip\MPLAB C30\support\peripheral_24F)
OpenSPI1
(
/* SPI1CON1 ���W�X�^�̐ݒ�@*/
ENABLE_SCK_PIN & //����SPI�N���b�N�L���@0xefff /*Internal SPI clock is enabled */
ENABLE_SDO_PIN & //�������W���[���iSDO�s��)�g�p�@�@0xf7ff /* SDO pin is used by module */
SPI_MODE16_ON & //�ʐM�P�ʁF�@16�r�b�g�@�@0x0400 /* Communication is word wide */
SPI_SMP_ON & //���̓f�[�^����i�ŃT���v�����O���� 0xffff /* Input data sampled at end of data output time */
SPI_CKE_OFF & //�o�̓f�[�^�ω��̔����F�@�A�C�h�����A�N�e�B�u�ω����@�@0xfeff /* Transmit happens on transition from idle clock state to active clock state */
SLAVE_ENABLE_OFF & //SS1�s���g�p�����@0xff7f /* Slave Select not used by module */
CLK_POL_ACTIVE_LOW & //�N���b�N�̋ɐ��I���F�@�A�C�h����Low�A�A�N�e�B�u��Low�@ 0xffff /* Idle state for clock is high, active is low */
MASTER_ENABLE_ON & //�}�X�^�[���[�h 0xffff /* Master Mode */
SEC_PRESCAL_1_1 & //�Q���v���X�P�[���F�@1�F1�@�@0xffff /* Secondary Prescale 1:1 */
PRI_PRESCAL_1_1 , //�P���v���X�P�[�A�F�@1�F1�@�@0xffff /* Primary Prescale 1:1 */
/*SPI2CON2 ���W�X�^�̐ݒ� */
FRAME_ENABLE_OFF & //�t���[��SPI�T�|�[�g�F�@OFF�@�@0x7fff /* Frame SPI support Disable */
FRAME_SYNC_INPUT & //�t���[�������p���X����͂Ƃ���@�@0xffff /* Frame sync pulse Input (slave) */
FRAME_POL_ACTIVE_HIGH & //�t���[�������p���X���A�N�e�B�uHigh�ɂ���@�@0xffff /* Frame sync pulse is active-high*/
FRAME_SYNC_EDGE_COINCIDE & // �t���[�������p���X���ŏ��̃r�b�g�Ɠ�������0xffff /* Frame sync pulse coincides with first bit clock */
FIFO_BUFFER_ENABLE , //FIFO�o�b�t�@�[�L�� 0xffff /* FIFO buffer enabled */
/* SPI1STAT ���W�X�^�̐ݒ� */
SPI_ENABLE & //SPI���W���[���L���@�@0xffff /* Enable module */
SPI_IDLE_CON & //�f�o�C�X���A�C�h���������W���[���͓���@�@0xdfff /* Continue module operation in idle mode */
SPI_RX_OVFLOW_CLR //��M�I�[�o�[�t���[�t���O�r�b�g�N���A 0xffbf /* Clear receive overflow bit.*/
);
SinTable(); //Sin�̃e�[�u���쐬
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�A�@�^�C�}�P������ON
ConfigIntSPI1(SPI_INT_DIS & SPI_INT_PRI_6); //���荞�݃��x���U�A�@SPI������OFF
EnableIntT1; //�^�C�}�P��������
while(1)
{
}
CloseTimer1();
CloseSPI1();
return 0;
}
�@
�����쌋�ʁ�
�@�@D/A�R���o�[�^ MCP4822��VoutA�i�W�ԃs���j�[�q�̏o�͓d���̔g�`���ȉ��Ɏ����܂��B
�@�@�@�@�@�o�͓d������
�@�@�@�@�@�@�@�E���g���@�F�@277.5Hz (�����F 3.6msec = 10��sec �~360 )
�@�@�@�@�@�@�@�E����\�@�F�@12�r�b�g
�@�@�@�@�@�@�@�E�U���iVp-p�j�@�F�@2.7V
�@�@�@�@�@�@ �E�T���v�����O���g���@�F�@100KH���@�@�@�@�@�@
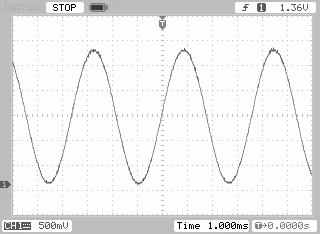 �i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�@�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁@�@�@�@������PIC�@C30�ҁ�
�i�Q�|�Q�j�@�ėpI/O�|�[�g���g�p�����ꍇ
�@�@�@PIC��SPI���W���[����SPI�ʐM�ȊO�̕ʂ̖ړI�Ŏg�p���Ă���ꍇ�Ȃǂɂ́A�ėp�|�[�g����SPI�ʐM������K�v��
�@�@����܂��B�ȉ��ɂ��̗���Љ�܂��BPIC18F452�̗���MCP4822�̃N���b�N���x���̐���������܂��̂ŎQ�Ɗ肢
�@�@�܂��B
�@�@������i�̎d�l��
�@�@�E�@�Pmsec���ɁA�P�x���̐������l���v�Z��SPI�ʐM��D/A�R���o�[�^MCP4822�ɓ`������B
�@�@�E�@MCP4822�i�d���d��+5V�j����́A0�` 4.096V�A����\�P�Q�r�b�g�̐����g�d�����o�͂���B
�@�@�@�@�@�o�͂���鐳���g�͎���360msec�i���g����2.78Hz�j�ł���B�@
�@�@�@
�@������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄�@
//*******************************************************************
//�@�O�t��DA�R���o�[�^MCP4822 (�ėp�|�[�g�o�́j
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�����g�o�́@�@�@�@�@�@�@�@�@�@�@�@
// �T���v�����O���g���F1KH���@�@�@�@�@�@�@�@�@�@����PIC30F4013
//*******************************************************************
// MPLAB��Link File
//�@�@�@�@Linler Script : p30f4013.gld
// Library File : libp30F4013-coff.a
#include <p30f4013.h>
#include <timer.h>
#include "math.h"
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
_FOSC(CSW_FSCM_OFF & // �N���b�N��ւ��Ȃ��A�t�F�[���Z�C�t�N���b�N���j�^�Ȃ�
XT_PLL8 //�O�����U�q���g���@�~�@�|�X�g�X�P�[���F1�@�~�@PLL�F8�{�@�@���@10MH���@�~�@1 �~�@�@8�@=�@80MHz
);
_FWDT(WDT_OFF); //�E�H�b�`�h�b�N�^�C�}�FOFF
_FBORPOR(PBOR_ON & //�u���E���A�E�g���Z�b�g�@�\�FON
BORV_42 & //�u���E���A�E�g�d���F4.2V
PWRT_64 & //�p���[�I�����Z�b�g�^�C�}64msec
MCLR_EN //MCLR�@�\�FON
);
_FGS(CODE_PROT_OFF); //�R�[�h�v���e�N�g�FOFF
unsigned int Angle = 0; //
float PAI = 3.1416;
int Chanel = 0; //�o�̓`�����l���FA
void DAout(unsigned int Out)
{
int i =0;
LATDbits.LATD9 = 0; // clock low // RD9 : Clock(SCK)
LATDbits.LATD8 = 0; // cs low (select) // RD8 : Chip Select(CS)
LATDbits.LATD3 = Chanel; // VoutA�ɏo�� 0:Chanel A 1:Chanel B
// RD3 : Data(SDI)
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 1; //dumy
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 0; //�Q�C���ݒ�r�b�g�@1�F G = 1 �@ �@�@�O�F G = 2
// G = 2; V = Data/4096 * 2.048*2 [V]
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 1; //�V���b�g�_�E���ݒ�r�b�g 1�F�@�o�̓C�l�C�u���@�@�@�@�O�F�@�V���b�g�_�E��
// output enable
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
for(i=0; i<12; i++) //�@���M�f�[�^��MSB���珇���P�r�b�g�Âo�͂���
{
if((Out & 0b0000100000000000) == 0)LATDbits.LATD3 = 0;
else LATDbits.LATD3 = 1;
Out = (Out << 1);
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
}
LATDbits.LATD8 = 1; // cs high (MCP4822 Disable)
}
void _ISR _T1Interrupt(void) //1msec���̊����ݔ���
{
unsigned int Out;
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
Out = (unsigned int)(4095*(1 + sinf(2*PAI*Angle/360))/2);
//sinf():�P���x�@�@vs�@�@sin():�{���x
DAout(Out);
Angle++;
if(Angle >= 360)Angle = 0;
}
int main(void)
{
TRISD = 0; //�|�[�gD���o�̓��[�h�ɐݒ�
TRISF = 0;
//�^�C�}�P�ݒ�
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_1 & //�v���X�P�[���@1/1
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
(unsigned int)(80000000/4/ 1000/1 - 1) // �T���v�����O���g��1KH��
);
LATDbits.LATD8 = 0; //CS = 0;
ConfigIntTimer1( T1_INT_ON & T1_INT_PRIOR_5 ); //�^�C�}�P������ON�@�@�����݃��x���T�@
EnableIntT1; //��������
while(1)
{
}
CloseTimer1();
return 0;
}
�����쌋�ʁ�
�@�@D/A�R���o�[�^ MCP4822��VoutA�i�W�ԃs���j�[�q�̏o�͓d���̔g�`���ȉ��Ɏ����܂��B
�@�@�@�@�@�o�͓d������
�@�@�@�@�@�@�@�E���g���@�F�@2.78Hz( = 1000msec / 360msec�j
�@�@�@�@�@�@�@�E����\�@�F�@12�r�b�g
�@�@�@�@�@�@�@�E�U���iVp-p�j�@�F�@4.096V
�@�@�@�@�@�@ �E�T���v�����O���g���@�F�@1KH���@�@�@
 �i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�@�P�Q�r�b�gD/A�R���o�[�^�ւ̏������݁@�@�@�@��PIC32MX460F512L �@C32�ҁ�
�@�@�@�@�@SPI ���W���[���Ƃ��āA�@�}�C�N���`�b�v�e�N�m���W�[��D/A�R���o�[�^MCP4822��SPI�ʐM�Ő��䂵��D/A�ϊ��̗���Љ�܂��B
�@�@������i�̎d�l��
�@�@�E�@PIC�łP�x���̐����g�e�[�u�������A���̃f�[�^��500KH���ŃT���v�����O����SPI�ʐM��D/A�R���o�[�^
�@�@�@�@MCP4822�ɓ`������B
�@�@�E�@MCP4822�i�d���d��+3.3V�j����́A1.39KHz�i���j�AVp-p 2.7V�A����\�P�Q�r�b�g�̐����g�d�����o�͂���B
�@�@�@�@�@�@�@�@�i���j1.39KHz�@=�@500KH���@���@360
������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@�@�@�@�@�@�@�E�@QFP��PIC32MX460F512L�́A�}�C�N���`�b�v����J���p�^�[�Q�b�g�{�[�hExplore 16��CPU�{�[�h�Ƃ��āA�̔�����Ă���
�@�@�@�@�@�@�@�@�@�@�@�@PIM�iPlug in Moduke�j�Ɏ�������Ă�����̂��g���Ă��܂��B
�@�@�@�@�@�@�@�@�@�@�E�g�p���Ă��郆�j�o�[�T���L�o��������̃��j�o�[�T���L�o���ł��B

�@���v���O�����၄
///************************************************************/
// SPI�ʐM�ɂ�鐳���g�o�́@�@�@�@�@�@�@�@�@�@�@�@
// �T���v�����O���g���F500KH�� �@�@�o�͐����g�@12bit�@1.39 KHz�@
// �@PC32MX460F512L + MCP4822
//************************************************************/
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
//#include "math.h" //math.h�́@plib.h�̊܂܂�Ă���
// �R���t�B�M�����[�V�����ݒ�
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
int Clock = 80000000; //80MHz
short int sinValue[360]; //sin�e�[�u���l�@RAM�e�ʂ����Ȃ��̂ő傫�Ȓl�i��1000�j���Ƃ�ƕs���Ȍ��ۂ��ł�
short int angleValue = 0; //
float PAI = 3.1416;
void __ISR(4,ipl2)T1Hander(void) //�^�C�}�P�����@2��sec��
{
short int temp;
mT1ClearIntFlag(); //�^�C�}1�@�t���O�N���A
LATDbits.LATD11 = 0; //CS = 0
WriteSPI1(sinValue[angleValue] | 0b0001000000000000); //VoutA�ɃQ�C���Q�ŏo��
//MCP4822�ւ̏������݃R�}���h
//bit15�i�������݃��W�X�^�I���j�@�@ 1:VoutB�@�@ 0:VoutA
//bit14�i�\���j
//bit13�i�o�̓Q�C���I���j�@�@1:1�{�@�@�@0:2�{�@
//bit12�i�o�̓I�t����j�@�@1�F�o��ON�@�@0�F�o��OFF�@
//bit11�`bit0 �f�[�^�@�@MSB���珇�����M�����
angleValue++;
if(angleValue >= 360)angleValue = 0;
//1��sec delay�@�i�@Nop()0.05��sec�@�~20�� = 1��sec�@�j�@�@�@//�@0.2��sec�ȉ�NG
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();Nop();
LATDbits.LATD11 = 1; //CS = 1 �� CS�̗����オ��G�b�W��MCP4822�̏o�̓��W�X�^�ɑ��M�f�[�^�����b�`�����
}
void SinTable() //Sin �̃e�[�u���쐬
{
short int i;
int value;
for(i = 0; i < 360; i++)
{
value = (1 + sinf(2*PAI*i/360))/2*4095*3.3/5; //sinf():�P���x�@�@vs�@�@sin():�{���x
if( value < 0) value = 0;
sinValue[i] = (short int)value;
//Vout = 2.048�~2�~Dn/4095�@�@Vout(max) = 4.096[V] ( > 3.3V�i�d���d���j�j�@�@�@4.096�~3.3/5�@=�@2.7V�@�i<�@�i3.3V���I�y�A���v�O�a�d��))
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
mJTAGPortEnable(DEBUG_JTAGPORT_OFF);
TRISD = 0x00000000; //SCK1/RD10�ASDO1/RD0�@�iCS)RD11 �̊e�|�[�g���o�̓��[�h�ɐݒ�
OpenTimer1
(
T1_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T1_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T1_PS_1_1, //�v���X�P�[���@1/256�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
160 //PRx�l�F800 ���@�@T0[��sec] = 1000000/80000000*1*200�@= 2.0 ��sec
//PICMX32��1�N���b�N��1����
//���� T0�msec�n�@=�@1/Fosc�@�~�@�v���X�P�[���̋t���@�~ PRx�l
);
SpiChnOpen
(
1, //�L�����`�����l���F�@�`�����l���P
SPICON_MSTEN | //�}�X�^�[���[�h�L�����@//Master mode Enable
// SPICON_CKP | //�N���b�N�ɐ�����L //Clock Polarity control
// SPICON_SSEN | //SS�s������F�L�@//Slave Select pin control
SPICON_CKE | //�����@�N���b�N�G�b�W����: �C�l�[�u��// �N���b�N��Active��idle�ɕω��������f�[�^�ω��@//Clock Edge control
SPICON_SMP | //�f�[�^���o�^�C�~���O�F�@�f�[�^�̌㉏�@//Sample phase control
SPICON_MODE16 | //�f�[�^���F�@16�r�b�g�@//Character width control
// SPICON_DISSDO | //SDO�s������F�@�� �iSDO�|�[�g��SPI���W���[���Ƃ��Ďg�p���Ȃ��j�@//SDO pin control
// SPICON_SIDL | //�A�C�h����CPU����F�@��~�@//idle functinality control
// SPICON_FRZ | //�f�o�b�O��O���[�h����F�@��~//debug functionality control
SPICON_ON, //SPI����F�@�L���@//Module ON control
// SPICON_SPIFE | //�t���[�������p���X�G�b�W�F�@���p���X�ƈ�v�@//Frame Sync edge control
// SPICON_FRMPOL | //�t���[������F�@Active High //Frame Sync Polality control
// SPICON_FRMSYNC | //�t���[�������p���X�F�@���́@//Frame Sync Direction control
// SPICON_FRMEN | //�t���[�����[�h�F�@�L���@//Frame Mode enable
4 //fpbDiv = 4�@���@�@SPI�N���b�N���g���F20MH���@�i=80MHz�i�V�X�e���N���b�N���g���j��1�iPostscaler div:FPBDIV=DIV_1)��4�j
////fpbDiv: Fpbclk�i�y���t�F�����o�X�N���b�N���g���j�̕������2�`1024�̒l
//fpbDiv = 2 �~�@�iSPIxBRG<8:0> + 1)
//SPI�N���b�N���g���@=�@Fpbclk / fpbDiv
// = Fpbclk / (�@2�@�~�iSPIxBRG<8:0> + 1))
);
LATDbits.LATD11 = 1; //CS = 1
SinTable(); //Sin�̃e�[�u���쐬
ConfigIntTimer1(T1_INT_ON | T1_INT_PRIOR_2); //�^�C�}�P����ON�A���荞�݃��x���Q
INTEnableSystemMultiVectoredInt(); //���荞�݂��}���`�x�N�^���[�h�ŋ���
while(1) //���荞�݂�҂�
{
}
}
�����쌋�ʁ�
�@�@D/A�R���o�[�^ MCP4822��VoutA�i�W�ԃs���j�[�q�̏o�͓d���̔g�`���ȉ��Ɏ����܂��B
�@�@�@�@�@�o�͓d������
�@�@�@�@�@�@�@�E���g���@�F�@1.39KHz( = 1000msec / 360msec�j
�@�@�@�@�@�@�@�E����\�@�F�@12�r�b�g
�@�@�@�@�@�@�@�E�U���iVp-p�j�@�F�@2.7V
�@�@�@�@�@�@ �E�T���v�����O���g���@�F�@500KH���@
 �i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�P�Q�r�b�gD/A�R���o�[�^�ւ̏��������@�@�@�@��PIC32MZ2048ECH100 �@Harmony�@+�@XC32�ҁ�
�@�@�@�@�@SPI ���W���[���Ƃ��āA�@�}�C�N���`�b�v�e�N�m���W�[��D/A�R���o�[�^MCP4822��SPI�ʐM�Ő��䂵��D/A�ϊ��̗���Љ�܂��B
�@�@������i�̎d�l��
�@�@�E�@PIC�łP�x���̐����g�e�[�u�������A���̃f�[�^��500KH���ŃT���v�����O����SPI�ʐM��D/A�R���o�[�^
�@�@�@�@MCP4822�ɓ`������B
�@�@�E�@MCP4822�i�d���d��+3.3V�j����́A1.39KHz�i���j�AVp-p 2.7V�A����\�P�Q�r�b�g�̐����g�d�����o�͂���B
�@�@�@�@�@�@�@�@�i���j1.39KHz�@=�@500KH���@���@360
�@�@�E�@�J�����@�c�c�@ Harmony: ver. 1.00�@�@�@XC32: ver.1.33 �@�@�@MPLABX: ver.2.25�@�@�@�@PIC32MZ2048ECH100:
revision 5
������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
�@�@�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@
�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain.c
//-------------------------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Asysytem_config.h
//-------------------------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony System Configuration Header
File Name:
system_config.h
Summary:
Build-time configuration header for the system defined by this MPLAB Harmony
project.
Description:
An MPLAB Project may have multiple configurations. This file defines the
build-time options for a single configuration.
Remarks:
This configuration header must not define any prototypes or data
definitions (or include any files that do). It only provides macro
definitions for build-time configuration options that are not instantiated
until used by another MPLAB Harmony module or application.
Created with MPLAB Harmony Version 1.00
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
#ifndef _SYSTEM_CONFIG_H
#define _SYSTEM_CONFIG_H
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
/* This section Includes other configuration headers necessary to completely
define this configuration.
*/
// *****************************************************************************
// *****************************************************************************
// Section: System Service Configuration
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Clock System Service Configuration Options
*/
#define SYS_CLK_SOURCE SYS_CLK_SOURCE_PRIMARY_SYSPLL
#define SYS_CLK_FREQ 200000000ul
#define SYS_CLK_CONFIG_PRIMARY_XTAL 24000000ul
#define SYS_CLK_CONFIG_SECONDARY_XTAL 32768ul
#define SYS_CLK_CONFIG_SYSPLL_INP_DIVISOR 8
#define SYS_CLK_CONFIG_FREQ_ERROR_LIMIT 10
#define SYS_CLK_CONFIGBIT_USBPLL_ENABLE true
#define SYS_CLK_CONFIG_USB_CLOCK 24000000ul
#define SYS_CLK_WAIT_FOR_SWITCH true
#define SYS_CLK_KEEP_SECONDARY_OSC_ENABLED true
#define SYS_CLK_ON_WAIT OSC_ON_WAIT_IDLE
/*** Common System Service Configuration ***/
#define SYS_BUFFER false
#define SYS_QUEUE false
// *****************************************************************************
/* Device Control System Service Configuration Options
*/
#define SYS_DEVCON_SYSTEM_CLOCK 200000000
/*** Interrupt System Service Configuration ***/
#define SYS_INT true
// *****************************************************************************
// *****************************************************************************
// Section: Driver Configuration
// *****************************************************************************
// *****************************************************************************
/*** Timer Driver Configuration ***/
#define DRV_TMR_INTERRUPT_SOURCE_IDX0 INT_SOURCE_TIMER_1
/*** SPI Driver Configuration ***/
/*** Driver Compilation and static configuration options. ***/
/*** Select SPI compilation units.***/
#define DRV_SPI_ISR 0
#define DRV_SPI_POLLED 1
#define DRV_SPI_MASTER 1
#define DRV_SPI_SLAVE 0
#define DRV_SPI_RM 0
#define DRV_SPI_EBM 1
#define DRV_SPI_8BIT 0
#define DRV_SPI_16BIT 1
#define DRV_SPI_32BIT 0
#define DRV_SPI_DMA 0
/*** SPI Driver Static Allocation Options ***/
#define DRV_SPI_INSTANCES_NUMBER 1
#define DRV_SPI_CLIENTS_NUMBER 1
#define DRV_SPI_ELEMENTS_PER_QUEUE 10
/*** SPI Driver Index 0 configuration ***/
#define DRV_SPI_SPI_ID_IDX0 SPI_ID_4 //SPI�`�����l��4��ݒ�
#define DRV_SPI_TASK_MODE_IDX0 DRV_SPI_TASK_MODE_POLLED
#define DRV_SPI_SPI_MODE_IDX0 DRV_SPI_MODE_MASTER //�}�X�^�[���[�h
#define DRV_SPI_ALLOW_IDLE_RUN_IDX0 false
#define DRV_SPI_SPI_PROTOCOL_TYPE_IDX0 DRV_SPI_PROTOCOL_TYPE_STANDARD //�W�����[�h
#define DRV_SPI_COMM_WIDTH_IDX0 SPI_COMMUNICATION_WIDTH_16BITS //�f�[�^���F 16�r�b�g
#define DRV_SPI_SPI_CLOCK_IDX0 CLK_BUS_PERIPHERAL_2 //�N���b�N���[���@PBCLK2
#define DRV_SPI_BAUD_RATE_IDX0 1000000 //�{�[���[�g�F�@1MHz
#define DRV_SPI_BUFFER_TYPE_IDX0 DRV_SPI_BUFFER_TYPE_ENHANCED //�o�b�t�@�[�F�G���n���X�g
#define DRV_SPI_CLOCK_MODE_IDX0 DRV_SPI_CLOCK_MODE_IDLE_LOW_EDGE_FALL //�A�C�h����:Low //���o�G�b�W�F�@������
#define DRV_SPI_INPUT_PHASE_IDX0 SPI_INPUT_SAMPLING_PHASE_IN_MIDDLE //���o�ʑ��F�@������
#define DRV_SPI_TX_INT_SOURCE_IDX0 INT_SOURCE_SPI_4_TRANSMIT
#define DRV_SPI_RX_INT_SOURCE_IDX0 INT_SOURCE_SPI_4_RECEIVE
#define DRV_SPI_ERROR_INT_SOURCE_IDX0 INT_SOURCE_SPI_4_ERROR
#define DRV_SPI_QUEUE_SIZE_IDX0 10
#define DRV_SPI_RESERVED_JOB_IDX0 1
// *****************************************************************************
// *****************************************************************************
// Section: Middleware & Other Library Configuration
// *****************************************************************************
// *****************************************************************************
#endif // _SYSTEM_CONFIG_H
/*******************************************************************************
End of File
*/
//�ȉ��Aappp.c
//---------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
#include "math.h"
short int sinValue[360]; //sin�e�[�u���l
int delay_Clock = 200000000; //200MHz
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
void SinTable() //Sin �̃e�[�u���쐬
{
short int i;
float PAI = 3.1416;
int value;
for(i = 0; i < 360; i++)
{
value = (1 + sinf(2*PAI*i/360))/2*4095*3.3/5; //sinf():�P���x�@�@vs�@�@sin():�{���x
if( value < 0) value = 0;
sinValue[i] = (short int)value;
//Vout = 2.048�~2�~Dn/4095�@�@Vout(max) = 4.096[V] ( > 3.3V�i�d���d���j�j�@�@�@4.096�~3.3/5�@=�@2.7V�@�i<�@�i3.3V���I�y�A���v�O�a�d��))
}
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_D, 10 );
//TRISDbits.TRISD10 = 0; //RD10: out --> SCK4�[�q�o�̓|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_D, 11 );
//TRISDbits.TRISD11 = 0; //RD11: out --> SDO4�[�q�o�̓|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 14 );
//TRISAbits.TRISA14 = 0; //RA14: out --> CS����(MP4822)
PLIB_SPI_Enable(SPI_ID_4);
//SPI4CONbits.ON = 1; //SPI4 �C�l�[�u��
SinTable(); //Sin�g�`�e�[�u���쐬 //1deg��
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//--------------------------------------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "app.h"
#include "system_definitions.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
//-----------------------------------------------------------------------
//DEVCFG0���W�X�^
#pragma config EJTAGBEN = NORMAL
#pragma config DBGPER = ALLOW_PG2
#pragma config FSLEEP = OFF
#pragma config FECCCON = OFF_UNLOCKED
#pragma config BOOTISA = MIPS32
#pragma config TRCEN = OFF
#pragma config ICESEL = ICS_PGx2
#pragma config JTAGEN = OFF //JTAG �|�[�g Disable
#pragma config DEBUG = OFF
//----------------------------------------------------------------------
//DEVCFG1���W�X�^
#pragma config FNOSC = SPLL //PLL��H(�V�X�e��PLL�j�I�� //�V�X�e�����U��H //����FRC(8MHz�j�I���̏ꍇ�FFNOSC = FRCDIV //Oscillator Selection Bits (Fast RC Osc w/Div-by-N (FRCDIV))
#pragma config FDMTEN = OFF //�f�b�h�}���^�C�}�@OFF (Deadman Timer is disabled)
//#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // �����U��OFF //Secondary Oscillator Enable (Disable SOSC)
#pragma config IESO = OFF //�E�F�C�N�A�b�v����2�i���x�X�^�[�g�A�b�v�@// Internal/External Switch Over (Disabled)
#pragma config POSCMOD = HS //HS: �n�C�X�s�[�h���]�l�[�^���[�h // HS(High Speed Resonator Operation) Oscillator mode selected
//EC: �O�����U�� //EC(External Clock Input Operation) mode selected // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF //OSCCO�s���o�͖���
#pragma config FCKSM = CSECME //�N���b�N���U�F�ؑy�у��j�^�L�� //�唭�U�편�ׂ�FRC(�����������U��j�ɐؑ� //FSCM�iFail Safe Clock Monitor)����
#pragma config FWDTEN = OFF // �E�H�b�`�h�b�N�^�C�}�@OFF //Watchdog Timer Disable
//#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
//#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
//#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
//#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
//--------------------------------------------------------------------------------------------------------------------
// DEVCFG2���W�X�^
//�V�X�e���N���b�N�F200MHz
//�y���t�F�������g���F//default: 100MHz //PBxDIV��8�n�����ɐݒ�ύX��
//PBxDIV: PERIPHERAL BUS CLOCK DIVISOR CONTROL ���W�X�^��PBDIV<6:0>: Peripheral Bus Clock Divisor Control �r�b�g�Őݒ�
#pragma config FPLLRNG = RANGE_13_26_MHZ //PLL Input���g�����͔͈͐ݒ�// System PLL Input Range (13-26 MHz Input) �@//24MHz��
#pragma config FPLLIDIV = DIV_3 //PLL���͑��ł̕����F 1/3 // PLL�@Input���g�� = 24MH���@���@3�@���@8MHz // System PLL Input Divider (1x Divider)
//#pragma config FPLLICLK = PLL_POSC //�唭�U��H�I���@//����FRC�i8MHz�j�̏ꍇ��FPLLICLK = PLL_FRC// System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLICLK = PLL_FRC //�����������U��I�� //�������@�o�O�L�@�唭�U��H�I���̎��AFPLLICLK = PLL_POSC�ł͂Ȃ�FPLLICLK = PLL_FRC��I������B(at ver.1.33 XC32)
#pragma config FPLLMULT = MUL_50 //PLL�{���F50�{�@//8MHz x 50 = 400MHz //System PLL Multiplier (PLL Multiply by 50)
#pragma config FPLLODIV = DIV_2 //PLL�o�͑��ł̕����F 1/2 //�V�X�e���N���b�N�@=�@400MHz ���@2�@=�@200MH��
#pragma config UPLLFSEL = FREQ_24MHZ //USB��PLL���͂��@24MHz��12MHz�ɕϊ��@// USB PLL Input Frequency Selection (USB PLL input is 12 MHz)
#pragma config UPLLEN = ON //USB��PLL�ϊ��F�C�l�[�u���@// USB PLL Enable (USB PLL is enabled)
//--------------------------------------------------------------------------------------------------------------------------
//DEVCFG3���W�X�^
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = ON
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
/*** SPI Driver Initialization Data ***/
/*** Index 0 ***/
DRV_SPI_INIT drvSpi0InitData = //SPI4�I�u�W�F�N�g������
{
.spiId = DRV_SPI_SPI_ID_IDX0,
.taskMode = DRV_SPI_TASK_MODE_IDX0,
.spiMode = DRV_SPI_SPI_MODE_IDX0,
.allowIdleRun = DRV_SPI_ALLOW_IDLE_RUN_IDX0,
.spiProtocolType = DRV_SPI_SPI_PROTOCOL_TYPE_IDX0,
.commWidth = DRV_SPI_COMM_WIDTH_IDX0,
.spiClk = DRV_SPI_SPI_CLOCK_IDX0,
.baudRate = DRV_SPI_BAUD_RATE_IDX0,
.bufferType = DRV_SPI_BUFFER_TYPE_IDX0,
.clockMode = DRV_SPI_CLOCK_MODE_IDX0,
.inputSamplePhase = DRV_SPI_INPUT_PHASE_IDX0,
.queueSize = DRV_SPI_QUEUE_SIZE_IDX0,
.jobQueueReserveSize = DRV_SPI_RESERVED_JOB_IDX0,
};
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* System Clock Initialization Data
*/
const SYS_CLK_INIT sysClkInit =
{
.moduleInit = {0},
.systemClockSource = SYS_CLK_SOURCE,
.systemClockFrequencyHz = SYS_CLK_FREQ,
.waitTillComplete = true,
.secondaryOscKeepEnabled = true,
.onWaitInstruction = SYS_CLK_ON_WAIT,
};
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void DRV_TMR0_Initialize(void)
Summary:
Initializes Timer Driver Instance 0
Remarks:
*/
void DRV_TMR0_Initialize(void) //�^�C�}1�����ݒ�
{
/* Setup TMR0 Instance */
PLIB_TMR_Stop(TMR_ID_1); /* Disable Timer */
PLIB_TMR_ClockSourceSelect(TMR_ID_1, TMR_CLOCK_SOURCE_PERIPHERAL_CLOCK); /* Select clock source */
PLIB_TMR_PrescaleSelect(TMR_ID_1, TMR_PRESCALE_VALUE_8); /* Select prescalar value */
// PLIB_TMR_PrescaleSelect(TMR_ID_1, TMR_PRESCALE_VALUE_256); /* Select prescalar value */
PLIB_TMR_Mode16BitEnable(TMR_ID_1); /* Enable 16 bit mode */
PLIB_TMR_Counter16BitClear(TMR_ID_1); /* Clear counter */
/* Setup Interrupt */
PLIB_INT_SourceEnable(INT_ID_0, INT_SOURCE_TIMER_1);
PLIB_INT_VectorPrioritySet(INT_ID_0, INT_VECTOR_T1, INT_PRIORITY_LEVEL1);
PLIB_INT_VectorSubPrioritySet(INT_ID_0, INT_VECTOR_T1, INT_SUBPRIORITY_LEVEL2);
PLIB_TMR_Period16BitSet(TMR_ID_1,39063); //5 nsec x2 x 39063 x 8 = 100.0128msec = 100msec
PLIB_TMR_Start(TMR_ID_1); //�^�C�}�X�^�[�g
}
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize(&sysClkInit);
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_DEVCON_SYSTEM_CLOCK);
/* System Services Initialization */
SYS_INT_Initialize();
/* Initialize Drivers */
/* Timer Instanace 0 Call */
DRV_TMR0_Initialize();
/*** SPI Driver Index 0 initialization***/
//SPI4�p�@���}�b�v
RPD11Rbits.RPD11R = 0b1000; //RD11�s���Ɂ@SDO4�̏o�͂�����t��
sysObj.spiObjectIdx0 = DRV_SPI_Initialize(0, (const SYS_MODULE_INIT * const)&drvSpi0InitData);
/* Initialize System Services */
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_interrupt.c
//--------------------------------------------------------------------------------------------------------------
/*******************************************************************************
System Interrupts File
File Name:
system_int.c
Summary:
Raw ISR definitions.
Description:
This file contains a definitions of the raw ISRs required to support the
interrupt sub-system.
Summary:
This file contains source code for the interrupt vector functions in the
system.
Description:
This file contains source code for the interrupt vector functions in the
system. It implements the system and part specific vector "stub" functions
from which the individual "Tasks" functions are called for any modules
executing interrupt-driven in the MPLAB Harmony system.
Remarks:
This file requires access to the systemObjects global data structure that
contains the object handles to all MPLAB Harmony module objects executing
interrupt-driven in the system. These handles are passed into the individual
module "Tasks" functions to identify the instance of the module to maintain.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2011-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <xc.h>
#include <sys/attribs.h>
#include "app.h"
#include "system_definitions.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
int IntervalCount = 0;
short int angleValue = 0;
extern short int sinValue[360]; //sin�e�[�u���l
// *****************************************************************************
// *****************************************************************************
// Section: System Interrupt Vector Functions
// *****************************************************************************
// *****************************************************************************
void __ISR(_TIMER_1_VECTOR, ipl2) _IntHandlerDrvTmrInstance0(void)
{
PLIB_INT_SourceFlagClear(INT_ID_0,INT_SOURCE_TIMER_1);
// IFS0bits.T1IF= 0; //�^�C�}1���荞�݃t���O�N���A
LATAbits.LATA14 = 0; //MCP4822 CS = 0
PLIB_TMR_Period16BitSet(TMR_ID_1,25000); //5 nsec x2 x 25000 x 8 = 10000nsec = 1000��sec = 2msec
PLIB_SPI_BufferWrite16bit ( SPI_ID_4, (short int)(sinValue[angleValue] | 0b0001000000000000));
// SPI4BUF = (short int)(sinValue[angleValue] | 0b0001000000000000); //���M�f�[�^���M
//MP4822 ����R�}���h
//VoutA�ɃQ�C���Q�ŏo��
//MCP4822�ւ̏������݃R�}���h
//bit15�i�������݃��W�X�^�I���j�@�@ 1:VoutB�@�@ 0:VoutA
//bit14�i�\���j
//bit13�i�o�̓Q�C���I���j�@�@1:1�{�@�@�@0:2�{�@
//bit12�i�o�̓I�t����j�@�@1�F�o��ON�@�@0�F�o��OFF�@
//bit11?bit0 �f�[�^�@�@MSB���珇�����M�����
while(PLIB_SPI_IsBusy(SPI_ID_4)); //�����݊������܂�
// while(SPI4STATbits.SPITBF); //: SPI Transmit Buffer Full Status bit //SPI2SR���W�X�^�ւ̏����݊���
angleValue++;
if(angleValue >= 360)angleValue = 0;
delay_us(200);
LATAbits.LATA14 = 1; //MCP4822 CS = 1;
}
/*******************************************************************************
End of File
*/
�@
�����쌋�ʁ�
D/A�R���o�[�^ MCP4822��VoutA�i�W�ԃs���j�[�q�̏o�͓d���̔g�`���ȉ��Ɏ����܂��B
�@�@�@�@�@�o�͓d������
�@�@�@�@�@�@�@�E���g���@�F�@1.39KHz( = 1000msec / 360msec�j
�@�@�@�@�@�@�@�E����\�@�F�@12�r�b�g
�@�@�@�@�@�@�@�E�U���iVp-p�j�@�F�@2.7V
�@�@�@�@�@�@ �E�T���v�����O���g���@�F�@500KH���@
 �i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
�i�����F�f�W�^���I�V���@��ʁ@DS-5102�j
���@�t���b�V���������@�ǂݏ����@
�@�@�@�@��PIC32MZ2048ECH100�@�@Harmony + XC32�ҁ�
�@�@SPI�C���^�[�t�F�[�X �t���b�V���������ւ̓ǂݏ����̗���Љ�܂��B
������i�̎d�l��
�@�@�E�@SPI�C���^�[�t�F�[�X�����t���b�V���������ւ̓ǂݏ����������Ȃ�
�@�@�E�@�t���b�V���������́@�}�C�N���`�b�v��SST25VF016�i�������e�ʁF�@16M�r�b�g�j�Ƃ���
�@�@�E�@�}�C�R���������オ������@�t���b�V���������Ɂ@�ȉ��̕����������������
�@�@�@�@�@�@Hellow World
�@�@�@�@�A�@PIC32MZ Run
�@�@�@�@�B�@SPI Flash
�@�@�E�@���̌�A������������������ǂ݂����ā@�L�����N�^�t���ɕ\������B
�@�@�@�@�\���͈ȉ��̗v�̂ōs��
�@�@�@�@�@�@��i�F�@1����
�@�@�@�@�@�@ ���i�F �@Str=Hellow World
�@�@�@�@�A ��i�F�@�@2nd
�@�@�@�@�@�@���i�F�@�@Str=PIC32MZ Run
�@�@�@�@�B�@��i�F�@3rd
�@�@�@�@�@�@���i�F�@ Str=SPI Flash
�@�@�E�@�J�����@�c�c�@ Harmony: ver. 1.00�@�@�@XC32: ver.1.33 �@�@�@MPLABX: ver.2.25�@�@�@�@PIC32MZ2048ECH100:
revision 5
������i�̉�H�}���@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain.c
//---------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_config.h
//--------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony System Configuration Header
File Name:
system_config.h
Summary:
Build-time configuration header for the system defined by this MPLAB Harmony
project.
Description:
An MPLAB Project may have multiple configurations. This file defines the
build-time options for a single configuration.
Remarks:
This configuration header must not define any prototypes or data
definitions (or include any files that do). It only provides macro
definitions for build-time configuration options that are not instantiated
until used by another MPLAB Harmony module or application.
Created with MPLAB Harmony Version 1.00
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
#ifndef _SYSTEM_CONFIG_H
#define _SYSTEM_CONFIG_H
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
/* This section Includes other configuration headers necessary to completely
define this configuration.
*/
// *****************************************************************************
// *****************************************************************************
// Section: System Service Configuration
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Clock System Service Configuration Options
*/
#define SYS_CLK_SOURCE SYS_CLK_SOURCE_PRIMARY_SYSPLL
#define SYS_CLK_FREQ 200000000ul
#define SYS_CLK_CONFIG_PRIMARY_XTAL 24000000ul
#define SYS_CLK_CONFIG_SECONDARY_XTAL 32768ul
#define SYS_CLK_CONFIG_SYSPLL_INP_DIVISOR 8
#define SYS_CLK_CONFIG_FREQ_ERROR_LIMIT 10
#define SYS_CLK_CONFIGBIT_USBPLL_ENABLE true
#define SYS_CLK_CONFIG_USB_CLOCK 24000000ul
#define SYS_CLK_WAIT_FOR_SWITCH true
#define SYS_CLK_KEEP_SECONDARY_OSC_ENABLED true
#define SYS_CLK_ON_WAIT OSC_ON_WAIT_IDLE
/*** Common System Service Configuration ***/
#define SYS_BUFFER false
#define SYS_QUEUE false
// *****************************************************************************
/* Device Control System Service Configuration Options
*/
#define SYS_DEVCON_SYSTEM_CLOCK 200000000
/*** Interrupt System Service Configuration ***/
#define SYS_INT true
// *****************************************************************************
// *****************************************************************************
// Section: Driver Configuration
// *****************************************************************************
// *****************************************************************************
/*** Timer Driver Configuration ***/
#define DRV_TMR_INSTANCES_NUMBER 1
#define DRV_TMR_CLIENTS_NUMBER 1
#define DRV_TMR_INTERRUPT_MODE true
#define DRV_TMR_PERIPHERAL_ID_IDX0 TMR_ID_1
#define DRV_TMR_INTERRUPT_SOURCE_IDX0 INT_SOURCE_TIMER_1
#define DRV_TMR_INTERRUPT_VECTOR_IDX0 INT_VECTOR_T1
#define DRV_TMR_ISR_VECTOR_IDX0 _TIMER_1_VECTOR
#define DRV_TMR_INTERRUPT_PRIORITY_IDX0 INT_PRIORITY_LEVEL1
#define DRV_TMR_INTERRUPT_SUB_PRIORITY_IDX0 INT_SUBPRIORITY_LEVEL0
#define DRV_TMR_CLOCK_SOURCE_IDX0 DRV_TMR_CLKSOURCE_INTERNAL
#define DRV_TMR_PRESCALE_IDX0 TMR_PRESCALE_VALUE_256
#define DRV_TMR_OPERATION_MODE_IDX0 DRV_TMR_OPERATION_MODE_16_BIT
#define DRV_TMR_ASYNC_WRITE_ENABLE_IDX0 false
#define DRV_TMR_POWER_STATE_IDX0 SYS_MODULE_POWER_RUN_FULL
/*** SPI Driver Configuration ***/
/*** Driver Compilation and static configuration options. ***/
/*** Select SPI compilation units.***/
#define DRV_SPI_ISR 0
#define DRV_SPI_POLLED 1
#define DRV_SPI_MASTER 1
#define DRV_SPI_SLAVE 0
#define DRV_SPI_RM 0
#define DRV_SPI_EBM 1
#define DRV_SPI_8BIT 1
#define DRV_SPI_16BIT 0
#define DRV_SPI_32BIT 0
#define DRV_SPI_DMA 0
/*** SPI Driver Static Allocation Options ***/
#define DRV_SPI_INSTANCES_NUMBER 1
#define DRV_SPI_CLIENTS_NUMBER 1
#define DRV_SPI_ELEMENTS_PER_QUEUE 10
/*** SPI Driver Index 0 configuration ***/
#define DRV_SPI_SPI_ID_IDX0 SPI_ID_1
#define DRV_SPI_TASK_MODE_IDX0 DRV_SPI_TASK_MODE_POLLED
#define DRV_SPI_SPI_MODE_IDX0 DRV_SPI_MODE_MASTER //�}�X�^�[���[�h
#define DRV_SPI_ALLOW_IDLE_RUN_IDX0 false
#define DRV_SPI_SPI_PROTOCOL_TYPE_IDX0 DRV_SPI_PROTOCOL_TYPE_STANDARD //SPI�v���g�R���@�W��
#define DRV_SPI_COMM_WIDTH_IDX0 SPI_COMMUNICATION_WIDTH_8BITS //�f�[�^���@8�r�b�g
#define DRV_SPI_SPI_CLOCK_IDX0 CLK_BUS_PERIPHERAL_2 //�N���b�N���@PBCLK2
#define DRV_SPI_BAUD_RATE_IDX0 1000000 //SPI�N���b�N 1MHz
#define DRV_SPI_BUFFER_TYPE_IDX0 DRV_SPI_BUFFER_TYPE_ENHANCED
#define DRV_SPI_CLOCK_MODE_IDX0 DRV_SPI_CLOCK_MODE_IDLE_LOW_EDGE_FALL //SPI4CONbits.CKP = 0; //�N���b�N�̋ɐ��F�@�A�C�h���� = Low�A�@�A�N�e�B�u = High
//SPI4CONbits.CKE = 1; //�N���b�N��Active��idle�ɕω��������f�[�^�ω�
#define DRV_SPI_INPUT_PHASE_IDX0 SPI_INPUT_SAMPLING_PHASE_IN_MIDDLE
#define DRV_SPI_TX_INT_SOURCE_IDX0 INT_SOURCE_SPI_1_TRANSMIT
#define DRV_SPI_RX_INT_SOURCE_IDX0 INT_SOURCE_SPI_1_RECEIVE
#define DRV_SPI_ERROR_INT_SOURCE_IDX0 INT_SOURCE_SPI_1_ERROR
#define DRV_SPI_QUEUE_SIZE_IDX0 10
#define DRV_SPI_RESERVED_JOB_IDX0 1
// *****************************************************************************
// *****************************************************************************
// Section: Middleware & Other Library Configuration
// *****************************************************************************
// *****************************************************************************
#endif // _SYSTEM_CONFIG_H
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//----------------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
#include "1lcd_lib_C32.h"
int delay_Clock = 200000000; //200MHz
char Buf[17]; //1�t���\���o�b�t�@�[
char Buf2[25];
unsigned int adrStr = 0x00005678; //�ǂݏ�������SPI�t���b�V���̐擪�A�h���X
char* str;
char str_Hellow[] = "Hellow World";
char str_PIC32MZ[] = "PIC32MZ Run";
char str_SpiFlash[] = "SPI Flash";
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
ysSPIInitialize();
//SPI2�|�[�g�@&�@CS�|�[�g�ݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_G, 6 ); //RG6: out --> SCK2�[�q�o�̓|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionInputSet( PORTS_ID_0, PORT_CHANNEL_G, 7 ); //RG7: out --> SDI2�[�q���̓|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_G, 8 ); //RG8: out --> SDO2�[�q�o�̓|�[�g�ɐݒ�
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 0 ); //RA0: out --> CS�[�q(MCP4822)
//�A�i���O�E�f�W�^�����[�h�ݒ�
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_14, PORTS_PIN_MODE_DIGITAL); //RG6/AN14�|�[�g���f�W�^�����[�h�ɐݒ� //SCK2
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_13, PORTS_PIN_MODE_DIGITAL); //RG7/AN13�|�[�g���f�W�^�����[�h�ɐݒ� //SDI2
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_12, PORTS_PIN_MODE_DIGITAL); //RG8/AN12�|�[�g���f�W�^�����[�h�ɐݒ� //SDO2
PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_24, PORTS_PIN_MODE_DIGITAL); //RA0/AN24�|�[�g���f�W�^�����[�h�ɐݒ� //CS
/*
TRISGbits.TRISG6 = 0; //RG6: out --> SCK2�[�q�o�̓|�[�g�ɐݒ�
TRISGbits.TRISG7 = 1; //RG7: out --> SDI2�[�q���̓|�[�g�ɐݒ�
TRISGbits.TRISG8 = 0; //RG8: out --> SDO2�[�q�o�̓|�[�g�ɐݒ�
TRISAbits.TRISA0 = 0; //RA0: out --> CS�[�q(MCP4822)
ANSELGbits.ANSG6 = 0; //RG6�@�f�W�^�����[�h
ANSELGbits.ANSG7 = 0; //RG7�@�f�W�^�����[�h
ANSELGbits.ANSG8 = 0; //RG8�@�f�W�^�����[�h
ANSELAbits.ANSA0 = 0; //RA0�@�f�W�^�����[�h
*/
//�t���|�[�g���o�͐ݒ�-----------------------------
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 15 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 14 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 13 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 12 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 10 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 9 );
/*
TRISBbits.TRISB15 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB14 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB13 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB12 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA10 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA9 = 0; //�L�����N�^�t���|�[�g�ݒ�
*/
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"SPI R/W String ");//
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf," Start !! "); //
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(2000);
ysSPIInitialize();//SPI���W���[��������
ysSST25ResetWriteProtection(); //SPI�t���b�V���������@���C�g�v���e�N�g����
//1���---------------------------------------------------------------------------
ysSST25SectorErase(adrStr); //�Z�N�^����
//ysSST25ChipErase(); //�`�b�v����
ysSST25WriteArray(adrStr, str_Hellow, sizeof(str_Hellow)); ////����������
delay_ms(100);
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"1st "); //
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
str = &Buf[0]; //�@�|�C���^�ɃA�h���X����
ysSST25ReadArray(adrStr, str, 17) ; //������Ǐo��
sprintf(Buf,"%s",str);
sprintf(Buf2,"Str=%s ",Buf);
lcd_str(Buf2);
delay_ms(3000);
//2���-----------------------------------------------------------------------------
ysSST25SectorErase(adrStr); //�Z�N�^����
//ysSST25ChipErase(); //�`�b�v����
ysSST25WriteArray(adrStr, str_PIC32MZ, sizeof(str_PIC32MZ)); ////����������
delay_ms(100);
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"2nd "); //
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
str = &Buf[0]; //�@�|�C���^�ɃA�h���X����
ysSST25ReadArray(adrStr, str, 17) ; //������Ǐo��
sprintf(Buf,"%s",str);
sprintf(Buf2,"Str=%s ",Buf);
lcd_str(Buf2);
delay_ms(3000);
//3���------------------------------------------------------------------------
ysSST25SectorErase(adrStr); //�Z�N�^����
//ysSST25ChipErase(); //�`�b�v����
ysSST25WriteArray(adrStr, str_SpiFlash, sizeof(str_SpiFlash)); ////����������
delay_ms(100);
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"3rd "); //
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
str = &Buf[0]; //�@�|�C���^�ɃA�h���X����
ysSST25ReadArray(adrStr, str, 17) ; //������Ǐo��
sprintf(Buf,"%s",str);
sprintf(Buf2,"Str=%s ",Buf);
lcd_str(Buf2);
delay_ms(2000);
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//----------------------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "app.h"
#include "system_definitions.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
//�R���t�B�O
//-----------------------------------------------------------------------
//DEVCFG0���W�X�^
#pragma config EJTAGBEN = NORMAL
#pragma config DBGPER = ALLOW_PG2
#pragma config FSLEEP = OFF
#pragma config FECCCON = OFF_UNLOCKED
#pragma config BOOTISA = MIPS32
#pragma config TRCEN = OFF
#pragma config ICESEL = ICS_PGx2
#pragma config JTAGEN = OFF //JTAG �|�[�g Disable
#pragma config DEBUG = OFF
//----------------------------------------------------------------------
//DEVCFG1���W�X�^
#pragma config FNOSC = SPLL //PLL��H(�V�X�e��PLL�j�I�� //�V�X�e�����U��H //����FRC(8MHz�j�I���̏ꍇ�FFNOSC = FRCDIV //Oscillator Selection Bits (Fast RC Osc w/Div-by-N (FRCDIV))
#pragma config FDMTEN = OFF //�f�b�h�}���^�C�}�@OFF (Deadman Timer is disabled)
//#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // �����U��OFF //Secondary Oscillator Enable (Disable SOSC)
#pragma config IESO = OFF //�E�F�C�N�A�b�v����2�i���x�X�^�[�g�A�b�v�@// Internal/External Switch Over (Disabled)
#pragma config POSCMOD = HS //HS: �n�C�X�s�[�h���]�l�[�^���[�h // HS(High Speed Resonator Operation) Oscillator mode selected
//EC: �O�����U�� //EC(External Clock Input Operation) mode selected // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF //OSCCO�s���o�͖���
#pragma config FCKSM = CSECME //�N���b�N���U�F�ؑy�у��j�^�L�� //�唭�U�편�ׂ�FRC(�����������U��j�ɐؑ� //FSCM�iFail Safe Clock Monitor)����
#pragma config FWDTEN = OFF // �E�H�b�`�h�b�N�^�C�}�@OFF //Watchdog Timer Disable
//#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
//#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
//#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
//#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
//--------------------------------------------------------------------------------------------------------------------
// DEVCFG2���W�X�^
//�V�X�e���N���b�N�F200MHz
//�y���t�F�������g���F//default: 100MHz //PBxDIV��8�n�����ɐݒ�ύX��
//PBxDIV: PERIPHERAL BUS CLOCK DIVISOR CONTROL ���W�X�^��PBDIV<6:0>: Peripheral Bus Clock Divisor Control �r�b�g�Őݒ�
#pragma config FPLLRNG = RANGE_13_26_MHZ //PLL Input���g�����͔͈͐ݒ�// System PLL Input Range (13-26 MHz Input) �@//24MHz��
#pragma config FPLLIDIV = DIV_3 //PLL���͑��ł̕����F 1/3 // PLL�@Input���g�� = 24MH���@���@3�@���@8MHz // System PLL Input Divider (1x Divider)
//#pragma config FPLLICLK = PLL_POSC //�唭�U��H�I���@//����FRC�i8MHz�j�̏ꍇ��FPLLICLK = PLL_FRC// System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLICLK = PLL_FRC //�����������U��I�� //�������@�o�O�L�@�唭�U��H�I���̎��AFPLLICLK = PLL_POSC�ł͂Ȃ�FPLLICLK = PLL_FRC��I������B(at ver.1.33 XC32)
#pragma config FPLLMULT = MUL_50 //PLL�{���F50�{�@//8MHz x 50 = 400MHz //System PLL Multiplier (PLL Multiply by 50)
#pragma config FPLLODIV = DIV_2 //PLL�o�͑��ł̕����F 1/2 //�V�X�e���N���b�N�@=�@400MHz ���@2�@=�@200MH��
#pragma config UPLLFSEL = FREQ_24MHZ //USB��PLL���͂��@24MHz��12MHz�ɕϊ��@// USB PLL Input Frequency Selection (USB PLL input is 12 MHz)
#pragma config UPLLEN = ON //USB��PLL�ϊ��F�C�l�[�u���@// USB PLL Enable (USB PLL is enabled)
//--------------------------------------------------------------------------------------------------------------------------
//DEVCFG3���W�X�^
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = ON
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
/*** TMR Driver Initialization Data ***/
const DRV_TMR_INIT drvTmr0InitData =
{
.moduleInit.sys.powerState = DRV_TMR_POWER_STATE_IDX0,
.tmrId = DRV_TMR_PERIPHERAL_ID_IDX0,
.clockSource = DRV_TMR_CLOCK_SOURCE_IDX0,
.prescale = DRV_TMR_PRESCALE_IDX0,
.mode = DRV_TMR_OPERATION_MODE_IDX0,
.interruptSource = DRV_TMR_INTERRUPT_SOURCE_IDX0,
.asyncWriteEnable = false,
};
/*** SPI Driver Initialization Data ***/
/*** Index 0 ***/
DRV_SPI_INIT drvSpi0InitData = //SPI�ʐM�����@������
{
.spiId = DRV_SPI_SPI_ID_IDX0,
.taskMode = DRV_SPI_TASK_MODE_IDX0,
.spiMode = DRV_SPI_SPI_MODE_IDX0,
.allowIdleRun = DRV_SPI_ALLOW_IDLE_RUN_IDX0,
.spiProtocolType = DRV_SPI_SPI_PROTOCOL_TYPE_IDX0,
.commWidth = DRV_SPI_COMM_WIDTH_IDX0,
.spiClk = DRV_SPI_SPI_CLOCK_IDX0,
.baudRate = DRV_SPI_BAUD_RATE_IDX0,
.bufferType = DRV_SPI_BUFFER_TYPE_IDX0,
.clockMode = DRV_SPI_CLOCK_MODE_IDX0,
.inputSamplePhase = DRV_SPI_INPUT_PHASE_IDX0,
.queueSize = DRV_SPI_QUEUE_SIZE_IDX0,
.jobQueueReserveSize = DRV_SPI_RESERVED_JOB_IDX0,
};
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* System Clock Initialization Data
*/
const SYS_CLK_INIT sysClkInit =
{
.moduleInit = {0},
.systemClockSource = SYS_CLK_SOURCE,
.systemClockFrequencyHz = SYS_CLK_FREQ,
.waitTillComplete = true,
.secondaryOscKeepEnabled = true,
.onWaitInstruction = SYS_CLK_ON_WAIT,
};
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize(&sysClkInit);
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_DEVCON_SYSTEM_CLOCK);
/* System Services Initialization */
SYS_INT_Initialize();
/* Initialize Drivers */
sysObj.drvTmr0 = DRV_TMR_Initialize(DRV_TMR_INDEX_0, (SYS_MODULE_INIT *)&drvTmr0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_T1, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_T1, INT_SUBPRIORITY_LEVEL0);
/*** SPI Driver Index 0 initialization***/
//SPI2�p�@�s������t���i���}�b�v�j
RPG8Rbits.RPG8R = 0b0110; //RG8�s���Ɂ@SDO2�̏o�͂�����t��
SDI2Rbits.SDI2R = 0b0001; //RPG7�s���� SDI2�i���́j������t��
sysObj.spiObjectIdx0 = DRV_SPI_Initialize(0, (const SYS_MODULE_INIT * const)&drvSpi0InitData);
/* Initialize System Services */
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��AspiMem_25LC_lib.h
//------------------------------------------------------------------------------------------------------------
//spiMem_25LC_lib.h
/////////////////////////////////////////////////////////////////////////////////////////////////////////
//�@SPI�t���b�V���������@�ǂݏ������C�u����
//�@��
//�@void ysSPIInitialize(void) �c�c�@������
//
//�@unsigned char ysSST25ReadByte(unsigned int address) �c�c�@1�o�C�g�ǂݍ��݁@
// �����F�ǂݍ��ރ������̃A�h���X�A�߂�l�F�ǂݍ��ݒl
//�@void ysSST25WriteByte(unsigned char data, unsigned int address) �c�c1�o�C�g������
// ��1�����F�����ݒl�A��2�����F�������ރ������̃A�h���X
//�@void ysSST25ReadArray(unsigned int address, unsigned char *pData, unsigned short int nCount)�c�c������ǂݍ���
// ��1�����F�ǂݍ��ސ擪�A�h���X�A��2�����F�ǂݍ�������̃|�C���^�A��3�����F�Ǎ��ޕ�����̒���
//�@void ysSST25WriteArray(unsigned int address, unsigned char *pData, unsigned short nCount)�@�c�c��������
// ��1�����F�������ސ擪�A�h���X�A��2�����F�������ޕ�����̃|�C���^�A�������ޕ�����̒���
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////
//�K�pSPI������
//�}�C�N���`�b�v�A�e�L�T�X��
//25LXXX ��F25L640�i64K�r�b�g�j
//25LCXXX ��F25LC128�i128K�r�b�g�j
//25AAXXX ��F25AA512�i512K�r�b�g�j
//SST25VFXXX ��FSST25VF16B(16M�r�b�g�j
//LC25 �R�}���h
#define ysSST25_CMD_READ (unsigned)0x03 //Read instruction, 03H,
#define ysSST25_CMD_WRITE (unsigned)0x02 //Page-Program instruction, 02H //To program up to 256 Bytes
#define ysSST25_CMD_WREN (unsigned)0x06 //Write-Enable (WREN) instruction, 06H,
#define ysSST25_CMD_RDSR (unsigned)0x05 //Read-Status-Register (RDSR) instruction,05H,
#define ysSST25_CMD_EWSR (unsigned)0x50 //64 KByte Block-Erase
#define ysSST25_CMD_SER (unsigned)0x20 //4 KByte Sector-Erase
#define ysSST25_CMD_ERASE (unsigned)0x60 //Chip-Erase
#define ysSST25_CMD_WRSR (unsigned)0x01 // Write Status Register
//SPI���W���[���`�����l���ݒ�
#define SPIXCON SPI2CON //SPI2�R���g���[�����W�X�^�ݒ�
#define SPIXSTAT SPI2STAT //SPI2�X�e�[�^�X���W�X�^�ݒ�
#define SPIXCONbits SPI2CONbits
#define SPIXSTATbits SPI2STATbits
#define SPIXBUF SPI2BUF //SPI2�o�b�t�@���W�X�^�ݒ�
#define SPIXBRG SPI2BRG //SPI2�{�[���[�g���W�X�^�ݒ�
//CS �|�[�g�ݒ�
#define ysSST25CSLow() LATAbits.LATA0 = 0
#define ysSST25CSHigh() LATAbits.LATA0 = 1
//�v���g�^�C�v�錾
void ysSPIInitialize(void);
void ysSPIPut(unsigned char data);
unsigned char ysSPIGet (void);
unsigned char ysSST25IsWriteBusy(void);
void ysSST25WriteEnable(void);
void ysSST25SectorErase(unsigned int address);
void ysSST25ChipErase(void);
void ysSST25ResetWriteProtection(void);
unsigned char ysSST25ReadByte(unsigned int address);
void ysSST25WriteByte(unsigned char data, unsigned int address);
void ysSST25ReadArray(unsigned int address, unsigned char *pData, unsigned short int nCount);
void ysSST25WriteArray(unsigned int address, unsigned char *pData, unsigned short nCount);
//�Q�l
//SPI�t���b�V���������@����
//16 Mbit SPI Serial Flash SST25VF016B
//Features
//Single Voltage Read and Write Operations 2.7-3.6V
//Serial Interface Architecture SPI Compatible: Mode 0 and Mode 3
//High Speed Clock Frequency? Up to 80 MHz
//Superior Reliability Endurance: 100,000 Cycles (typical)
// Greater than 100 years Data Retention
//Low Power Consumption: Active Read Current: 10 mA (typical)
// Standby Current: 5 ��A (typical)
//Flexible Erase Capability Uniform 4 KByte sectors
// Uniform 32 KByte overlay blocks
// Uniform 64 KByte overlay blocks
//Fast Erase and Byte-Program: Chip-Erase Time: 35 ms (typical)
// Sector-/Block-Erase Time: 18 ms (typical)
// Byte-Program Time: 7 ��s (typical)
//�ȉ��AspiMem_25LC_lib.c
//---------------------------------------------------------------------------------------------------
//spiMem_25LC_lib.c
#include "spiMem_25LC_lib.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
void ysSPIInitialize(void)
{
//�`�����l�������ݒ�
SPIXCON = 0; //SPIX ����
SPIXSTAT = 0;
SPIXCONbits.FRMEN = 0; //�t���[�����@�f�B�Z�[�u��
SPIXCONbits.MSTEN = 1; //�}�X�^�[���[�h�@�C�l�[�u��
SPIXCONbits.CKP = 0; //�N���b�N�̋ɐ��F�@�A�C�h���� = Low�A�@�A�N�e�B�u = High
SPIXCONbits.CKE = 1; //�N���b�N�G�b�W����: �C�l�[�u��// �N���b�N��Active��idle�ɕω��������f�[�^�ω��@//Clock Edge control
//MCP4822: �N���b�N�̗����G�b�W�Ńf�[�^�ǂݍ���
SPIXCONbits.SMP = 1; //�f�[�^���o�^�C�~���O�F�@�f�[�^�̌㉏�@//Sample phase control
SPIXCONbits.MODE32 = 0; //�f�[�^���F�@8�r�b�g
SPIXCONbits.MODE16 = 0;
SPIXBRG = 49; //SPI�N���b�N���g��[Hz} = Fpbclk2(�y���t�F�����o�X�N���b�N�j/ 2 �� (SPI2BRG + 1)
// = 100MHz /2 /(49 +1) = 1 MHz
SPIXCONbits.ON = 1; //SPI2 �L��
}
void ysSPIPut(unsigned char data)
{
while(!SPIXSTATbits.SPITBE); //���M�o�b�t�@�[����ɂȂ�܂ő҂�
SPIXBUF = data; //����M�o�b�t�@�Ƀf�[�^����������
while(!SPIXSTATbits.SPIRBF); //RX FIFO����ɂȂ�܂ł���܂ő҂�
return;
}
unsigned char ysSPIGet (void)
{
unsigned char spiData = 0;
spiData = SPIXBUF; //����M�o�b�t�@�̃f�[�^��Ǎ���
return spiData;
}
unsigned char ysSST25IsWriteBusy(void)
{
unsigned char temp;
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_RDSR);
ysSPIGet();
ysSPIPut(0); //�_�~�[�𑗐M
temp = ysSPIGet();
ysSST25CSHigh();
return (temp & 0x01);
}
void ysSST25WriteEnable(void)
{
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_WREN);
ysSPIGet();
ysSST25CSHigh();
}
void ysSST25SectorErase(unsigned int address) //�Z�N�^���� //�����Z�N�^--> FFH //��������Z�N�^�́@�ŏ��ɑ��M�����MSB�ɂ�茈�܂�
{
ysSST25WriteEnable();
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_SER);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x00FF0000) >> 16)); //�����݃A�h���X�̑�2�o�C�g(MSB)���M //SPIPut(((DWORD_VAL) address).v[2]);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x0000FF00) >> 8 )); //�����݃A�h���X�̑�1�o�C�g���M //SPIPut(((DWORD_VAL) address).v[1])
ysSPIGet();
ysSPIPut((unsigned char)(address & 0x000000FF)); //�����݃A�h���X�̑�0�o�C�g(LSB)���M //SPIPut(((DWORD_VAL) address).v[0]);
ysSPIGet();
ysSST25CSHigh();
// Wait for write end
while(ysSST25IsWriteBusy());
}
void ysSST25ChipErase(void) //�S�`�b�v���� //�S�f�[�^ --> FFH
{
ysSST25WriteEnable(); //�lj�
ysSST25CSLow();
ysSPIInitialize();//SPI���W���[��������
ysSPIPut(ysSST25_CMD_ERASE);
ysSPIGet();
ysSST25CSHigh();
while(ysSST25IsWriteBusy());
}
void ysSST25ResetWriteProtection(void) //���C�g�v���e�N�g���Z�b�g
{
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_EWSR); //�����݃C�l�[�u�� // send write enable command
//The Enable-Write-Status-Register (EWSR) instruction arms the Write-Status-Register (WRSR)instruction and opens the status register for alteration.
ysSPIGet();
ysSST25CSHigh();
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_WRSR); //�X�e�[�^�X���W�X�^(WRSR)�������R�}���h���M
//The Write-Status-Register instruction writes new values to the BP3, BP2, BP1, BP0, and BPL bits of the status register.
ysSPIGet();
ysSPIPut(0); //�X�e�[�^�X���W�X�^�@�N���A�@--> BP3, BP2, BP1, BP0 = 0�@--> ���C�g�v���e�N�g����
ysSPIGet();
ysSST25CSHigh();
while(ysSST25IsWriteBusy()); // Wait for write end
}
unsigned char ysSST25ReadByte(unsigned int address) //1�o�C�g�ǂݍ���
{
unsigned char temp;
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_READ);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x00FF0000) >> 16)); //�����݃A�h���X�̑�2�o�C�g(MSB)���M //SPIPut(((DWORD_VAL) address).v[2]);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x0000FF00) >> 8 )); //�����݃A�h���X�̑�1�o�C�g���M //SPIPut(((DWORD_VAL) address).v[1])
ysSPIGet();
ysSPIPut((unsigned char)(address & 0x000000FF)); //�����݃A�h���X�̑�0�o�C�g(LSB)���M //SPIPut(((DWORD_VAL) address).v[0]);
ysSPIGet();
ysSPIPut(0); //�_�~�[�𑗐M
temp = ysSPIGet();
ysSST25CSHigh();
return (temp);
}
void ysSST25WriteByte(unsigned char data, unsigned int address) //1�o�C�g������
{
ysSST25WriteEnable();
ysSPIInitialize(); //SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_WRITE);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x00FF0000) >> 16)); //�����݃A�h���X�̑�2�o�C�g(MSB)���M //SPIPut(((DWORD_VAL) address).v[2]);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x0000FF00) >> 8 )); //�����݃A�h���X�̑�1�o�C�g���M //SPIPut(((DWORD_VAL) address).v[1])
ysSPIGet();
ysSPIPut((unsigned char)(address & 0x000000FF)); //�����݃A�h���X�̑�0�o�C�g(LSB)���M //SPIPut(((DWORD_VAL) address).v[0]);
ysSPIGet();
ysSPIPut(data); //�f�[�^(unsigned char)�𑗐M
ysSPIGet();
ysSST25CSHigh();
// Wait for write end
while(ysSST25IsWriteBusy());
}
void ysSST25WriteArray(unsigned int address, unsigned char *pData, unsigned short nCount) //��������
{
unsigned int addr;
unsigned char *pD;
unsigned short counter;
addr = address;
pD = pData;
// WRITE
for(counter = 0; counter < nCount; counter++)
{
ysSST25WriteByte(*pD++, addr++);
}
}
void ysSST25ReadArray(unsigned int address, unsigned char *pData, unsigned short int nCount) //������ǂݍ���
{
ysSPIInitialize();//SPI���W���[��������
ysSST25CSLow();
ysSPIPut(ysSST25_CMD_READ);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x00FF0000) >> 16)); //�����݃A�h���X�̑�2�o�C�g(MSB)���M //SPIPut(((DWORD_VAL) address).v[2]);
ysSPIGet();
ysSPIPut((unsigned char)((address & 0x0000FF00) >> 8 )); //�����݃A�h���X�̑�1�o�C�g���M //SPIPut(((DWORD_VAL) address).v[1])
ysSPIGet();
ysSPIPut((unsigned char)(address & 0x000000FF)); //�����݃A�h���X�̑�0�o�C�g(LSB)���M //SPIPut(((DWORD_VAL) address).v[0]);
ysSPIGet();
while(nCount--)
{
ysSPIPut(0);
*pData++ = ysSPIGet();
}
ysSST25CSHigh();
}
//�ȉ��A1lcd_lib_C32.h
//------------------------------------------------------------------------------------------------
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
#define lcd_Clock 200000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATAbits.LATA9 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATAbits.LATA10 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//�ȉ��A1lcd_lib_C32.c
//-------------------------------------------------------------------------------------------------------
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(lcd_Clock/20000000)*usec;
do //�����F�@at�@200MH (Clock=200000000)
{ //delay_us(1000)��1000.4��sec�A�@delay_us(100)��100.6��sec�Adelay_us(10)��10.5��sec�Adelay_us(1)��1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@
�@�����쌋�ʁ�
| �@ |
�\�����e |
�t���\�� |
�@���l�@ |
| �@�@�@ |
�ŏ��̓ǂݏ�����̕\�� |
 |
�@�@ |
| �A |
�Q�Ԗڂ̓ǂݏ�����̕\�� |
 |
�@�@ |
| �B |
�R�Ԗڂ̓ǂݏ�����̕\�� |
 |
�@�@ |
���@SD�J�[�h�ǂݏ����iEOF�j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��dsPIC C30�ҁ�
�@�������f�[�^�����ēǂݏo������ȉ��ɏЉ�܂��BFSfread( )�̖߂�l�͓ǂݍ��u���b�N���ł��B�ȉ��̗�
�ł͓ǂݍ������Ƃ�����0���߂��Ă�����i�G���[�̏ꍇ������܂����j�t�@�C���G���h�iEnd OF File)�Ɣ��f���Ă��܂��B
������i�̎d�l��
�@�E�T�O�Omsec���Ƃ�SD�J�[�h�ɐ�������������
�@�E�T�O�Omsec���̓ǂݏo���������Ȃ��ASD�J�[�h�̃f�[�^�����ׂēǂݏo��
�@�E�ǂݏo�����f�[�^��ǂݏo�������Ԃɉt���P�s�ڂ̍����珇�Ԃɕ\������B�T�߂���W�߂܂ł̃f�[�^�͂Q�s�ڂ�
�@�@�����珇�ԂɂȂ�ׂ�B
������i�̉�H�}���@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄�@�@�@
///**************************************************************************************************/
// �@�@�@�@�@�@SD�J�[�h�������݁@�y�с@�ǂݏo�� �@�@�@ File Name: SD R_W Basic3 4013.c
//�@�@�@�@�@�@�@�@�@ EOF
//�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@����PIC30F4013
//****************************************************************************************************/
// MPLAB�@�v���W�F�N�g�ւ̒lj��t�@�C��
// Source Files�t�H���_ FSIO.c
// SD-SPI.c
// 1lcd_lib_C30.c
// SD R_W Basic3 4013.c
// Header Files�t�H���_ FScohfig.h
// FSDefs.h
// FSIO.h
// GenericTypeDefs.h
// SD-SPI.h
// 1lcd_lib_C30.h
// Linker Script�t�H���_�@ p30f2012.gld
// Library Files�t�H���_�@ lib30F2012-coff.a
#include "p30f4013.h"
#include "1lcd_lib_C30.h"
#include <stdio.h>
#include <timer.h>
#include "FSIO.h"
_FOSC(CSW_FSCM_OFF & XT_PLL8); // 10MHzx8=80MHz
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & BORV_20 //2V:BORV_20 2.7V:BORV_27 4.2V:BORV_42 4.5V:BORV_45
& PWRT_64 & MCLR_EN);
_FGS(CODE_PROT_OFF);
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
unsigned int Buf_Input[1]; //AD�Ǎ��݂̃z�[���h�l��SD�J�[�h�������ݒl
unsigned int Buf_Output[1]; //SD�J�[�h�Ǎ��ݒl
unsigned int SD[20];
char blk = ' '; //�u�����N
int N_Write; //�������݉߂�l
unsigned int N_Read; //�ǂݏo���߂�l
FSFILE* pfile; //SD�J�[�h�̃t�@�C���|�C���^
unsigned int ix = 0,iy = 0;
int Mode_SD = 0; //
///�v���g�^�C�v��
void delay_ms(unsigned int);
//-------------------------------------------------------
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void _ISR _T1Interrupt(void) //500msec���̊����ݔ���
{
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
if(Mode_SD == 0) //SD�J�[�h�֏������݂̏ꍇ
{
Buf_Input[0] = 100 * (ix +1); //�������݃f�[�^���Z�b�g
N_Write = FSfwrite((const void*)Buf_Input,sizeof(unsigned int),1,pfile);//�t�@�C���Ƀf�[�^��������
if(N_Write == 1) //����ȏꍇ�F�������݉��Ԃ��Ă���
{
lcd_clear();
sprintf(Buf,"Write No%d OK !!",ix); //�t����"Write OK !" ��\��
lcd_str(Buf);
delay_ms(100);
}
else //�ُ�ȏꍇ
{
lcd_clear();
sprintf(Buf,"Write No%d NG !!",ix); //�t����"Write NG !" ��\��
lcd_str(Buf);
return 0;
}
ix++;
}
else //SD�J�[�h����ǂݍ��݂̏ꍇ
{
N_Read = FSfread(Buf_Output,sizeof(unsigned int),1,pfile);//�t�@�C������f�[�^�Ǎ���
if(N_Read != 0)
{
SD[iy] = Buf_Output[0];
iy++;
}
}
}
/// ���C����
int main(void)
{
int i;
////�@�|�[�g���o�̓��[�h�ݒ�
TRISB = 0b0000000000000000; // in :
TRISC = 0b0100000000000000; // in : RC14(Hold SW)
TRISD = 0b0000000000000011; // in : RD0(CD) RD1(WE)
TRISF = 0b0000000000000100; // in : RF2(SDI)
/// �^�C�}�P�����@10msec
/// bit15:�^�C�}On����r�b�g�@bit14:�������@�r�b�g13
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_256 & //�v���X�P�[���@1/256
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
80000000/4/2/256 - 1 //2Hz ���@500msec���̊�����
);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"SD R/W INT !!%c",blk);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
for(i = 0; i < 20; i++)SD[i] = 0; //SD[i]�̒l�F0���Z�b�g
PORTFbits.RF5 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
LATDbits.LATD2 = 1;
while(!FSInit()); //SD�J�[�h�C�j�V�����C�Y�@SD�J�[�h�̎����ƃt�H�[�}�b�g�ς��`�F�b�N
pfile = FSfopen("DATA.DAT","w"); //�t�@�C���������݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
Mode_SD = 0;
ix = 0;
ConfigIntTimer1(T1_INT_PRIOR_7 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
do
{
}while(ix < 6); // �U�̕����Ȃ������i�Q�o�C�g�j�f�[�^��SD�J�[�h�ɏ������ނ܂ŌJ��Ԃ�
DisableIntT1;
FSfclose(pfile); // �t�@�C�������
pfile = FSfopen("DATA.DAT","r"); //�t�@�C���Ǎ��݃��[�h�ŃI�[�v���@
Mode_SD = 1;
iy = 0;
N_Read = 1; //0����while(N_Read !=0)�������݂�����O�ɐ^�ƂȂ胋�[�v���Ă��܂�
EnableIntT1; //�^�C�}�P��������
do
{
}while(N_Read !=0); //N_ReaD��0���߂��Ă���iEOF�j�܂ő҂�
FSfclose(pfile); // �t�@�C�������
DisableIntT1;
PORTFbits.RF5 = 1; // CS = 1
lcd_clear();
sprintf(Buf,"%u %u %u %u ",SD[0],SD[1],SD[2],SD[3]);//SD�J�[�h����ǂݍ��f�[�^���t���ɕ\��
lcd_str(Buf);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(Buf,"%u %u %u %u ",SD[4],SD[5],SD[6],SD[7]);//SD�J�[�h����ǂݍ��f�[�^���t���ɕ\��
lcd_str(Buf);
while(1);
return 0;
}
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
*************************************************************************************************�@�@�@
*************************************************************************************************�@�@�@
***�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ***
*** ���̑��̃C���N���[�h�t�@�C���� ***
*** �uC����ł͂��߂�PIC24F���p�K�C�h�u�b�N�v�i��ՓN�� ���@�Z�p�]�_�Ёj ***
*** �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �̕t��CD�Ɏ��[����Ă��܂��B ***
*************************************************************************************************�@�@�@
*************************************************************************************************�@�@�@
//************************************************************************************************
//************************************************************************************************
//�ȉ��́@�C���N���[�h�t�@�C���@SD-SPI.h�̒��ŕύX���ʂ݂̂��������̂ł��B�@�s���A�T�C���W��
�@�ύX�ł��B
//�@
�@�c
�@�c
/********************************************************************/
/* Pin and register definitions */
/********************************************************************/
#define SD_CS PORTFbits.RF5
#define SD_CS_TRIS TRISFbits.TRISF5
#define SD_CD PORTDbits.RD0
#define SD_CD_TRIS TRISDbits.TRISD0
#define SD_WE PORTDbits.RD1
#define SD_WE_TRIS TRISDbits.TRISD1
// Registers for the SPI module you want to use
#define SPICON1 SPI1CON
#define SPISTAT SPI1STAT
#define SPIBUF SPI1BUF
#define SPISTAT_RBF SPI1STATbits.SPIRBF
#define SPICON1bits SPI1CONbits
#define SPISTATbits SPI1STATbits
// Tris pins for SCK/SDI/SDO lines
#define SPICLOCK TRISFbits.TRISF6
#define SPIIN TRISFbits.TRISF2
#define SPIOUT TRISFbits.TRISF3
�@�c
�@�c
//************************************************************************************************
//************************************************************************************************
//�@�ȉ��́@�C���N���[�h�t�@�C�� SD-SPI.c�̒��ŏC�����������݂̂��������̂ł��B
// SD�J�[�h�̃\�P�b�g�ɂ�菑�����݃v���e�N�g�̘_�����قȂ���̂�����悤�ł��B
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i��Ղ���ɂ������Ă��������܂����j
// �킽�����g�p����SD�J�[�h�\�P�b�g�̓T���n���g����CK29�ł��BCK29�̃��C�g�v���e�N�gWE�̘_����
// �h���C�g�v���e�N�g���������݉\�Ȉʒu�ɂ���SD�J�[�h�����܂ő}������� ON �h�ł��B���Ȃ킿
//�@�ȉ��̏ꍇ SD�J�[�h��WE��OFF�ł��B
//�@�@�@�@�ESD�J�[�h���}������Ă��Ȃ��ꍇ
//�@�@�@�@�E���C�g�v���e�N�g���������ݕs�̈ʒu�ɂ���SD�J�[�h�����܂ő}������Ă���ꍇ
//
//�@�ȉ��͏C���O�̃\�[�X�R�[�h�ł��BSD�J�[�h�̌��o�`�F�b�N�̕����ł��B�C���������̂́@SD_WE��
//�@�O�́h�I�h���폜����Ă��܂��B
//�@
// BYTE
// WriteProtectState(void)
// {
//�@ �@return(!SD_WE); // �C����́h!�h���폜����Ă��܂��B
// }
//
//
//
// �ȉ��͏C����̃\�[�X�R�[�h�ł��B
BYTE
WriteProtectState(void)
{
�@�@ return(SD_WE); // �h�I�h���폜����Ă��܂��B
}
//*********************************************************************************************************
//*************************************************************************************************:********
�@//�@�ȉ���FSconfig.h�t�@�C���̒��ŕύX���������݂̂��L�ڂ��Ă��܂��B�V�X�e���N���b�N��20MH������80MH���ɕύX
�@//�������Ƃɔ����ύX�ł�
// Define the system clock speed
//#define SYSTEM_CLOCK (DWORD)20000000
#define SYSTEM_CLOCK (DWORD)80000000
�����쌋�ʁ�
�@�@�U�̃f�[�^�����������ƁAFSfread( ) �łU�̃f�[�^���ׂĂ�ǂݏo�������ʂ����L�Ɏ����܂��B

���@SD�J�[�h�ǂݏ����iEOF�j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��PIC32MX�ҁ�
�@
������i�̎d�l��
�@�E�T�O�Omsec���Ƃ�SD�J�[�h�ɐ�������������
�@�E�T�O�Omsec���̓ǂݏo���������Ȃ��ASD�J�[�h�̃f�[�^�����ׂēǂݏo��
�@�E�ǂݏo�����f�[�^��ǂݏo�������Ԃɉt���P�s�ڂ̍����珇�Ԃɕ\������B�T�߂���W�߂܂ł̃f�[�^�͂Q�s�ڂ�
�@�@�����珇�ԂɂȂ�ׂ�B
������i�̉�H�}���@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@�@�@�@�@�@�@
���v���O�����၄
//�@�@�@�@SD�J�[�h�Ǐ����@EOF
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX460F512L�@
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include "1lcd_lib_C32.h"
#include "FSIO.h"
// �R���t�B�M�����[�V�����ݒ�
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
unsigned int Buf_Input[1]; //AD�Ǎ��݂̃z�[���h�l��SD�J�[�h�������ݒl
unsigned int Buf_Output[1]; //SD�J�[�h�Ǎ��ݒl
unsigned int SD[20];
int N_Write; //�������݉߂�l
FSFILE* pfile; //SD�J�[�h�̃t�@�C���|�C���^
unsigned int N_Read; //�ǂݏo���߂�l
unsigned int ix = 0,iy = 0;
int Mode_SD = 0; //
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
void __ISR(20,ipl2)T45Hander(void) //�^�C�}4+5�@32bit�^�C�}���荞�݁@500msec��
{
mT5ClearIntFlag(); //�t���O�N���A
if(Mode_SD == 0) //SD�J�[�h�֏������݂̏ꍇ
{
Buf_Input[0] = 100 * (ix +1); //�������݃f�[�^���Z�b�g
N_Write = FSfwrite((const void*)Buf_Input,sizeof(unsigned int),1,pfile);//�t�@�C���Ƀf�[�^��������
if(N_Write == 1) //����ȏꍇ�F�������݉��Ԃ��Ă���
{
lcd_clear();
sprintf(Buf,"Write No%d OK !!",ix); //�t����"Write OK !" ��\��
lcd_str(Buf);
delay_ms(100);
}
else //�ُ�ȏꍇ
{
lcd_clear();
sprintf(Buf,"Write No%d NG !!",ix); //�t����"Write NG !" ��\��
lcd_str(Buf);
return 0;
}
ix++;
}
else //SD�J�[�h����ǂݍ��݂̏ꍇ
{
N_Read = FSfread(Buf_Output,sizeof(unsigned int),1,pfile);//�t�@�C������f�[�^�Ǎ���
if(N_Read != 0)
{
SD[iy] = Buf_Output[0];
iy++;
}
}
}
int main(void)
{
int i;
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
TRISC = 0; //C�߰Ă��o�̓��[�h�ɐݒ�
TRISE = 0; //E�|�[�g���o�̓��[�h�ɐݒ�
DDPCONbits.JTAGEN = 0;//
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"SD EOF !!");//
lcd_str(Buf); //�t���\��
delay_ms(1000);
OpenTimer45(T45_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T45_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T45_PS_1_256, //�v���X�P�[���@1/256�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
156246 //PRx�l�F�@�@T0[msec] = 1000/80000000*256*156246�@= 499.987 msec
//PICMX32��1�N���b�N��1����
//���� T0�msec�n�@=�@1/Fosc�@�~�@�v���X�P�[���̋t���@�~ PRx�l
);
for(i = 0; i < 20; i++)SD[i] = 0; //SD[i]�̒l�F0���Z�b�g
LATCbits.LATC3 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
while(!FSInit()); //SD�J�[�h�C�j�V�����C�Y�@SD�J�[�h�̎����ƃt�H�[�}�b�g�ς��`�F�b�N
pfile = FSfopen("DATA.DAT","w"); //�t�@�C���������݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
Mode_SD = 0;
ix = 0;
ConfigIntTimer45(T45_INT_ON | T45_INT_PRIOR_2); //�^�C�}�P����ON�A���荞�݃��x���Q
INTEnableSystemMultiVectoredInt(); //���荞�݂��}���`�x�N�^���[�h�ŋ���
do
{
}while(ix < 6); // �U�̕����Ȃ������i�Q�o�C�g�j�f�[�^��SD�J�[�h�ɏ������ނ܂ŌJ��Ԃ�
DisableIntT45; //�^�C�}45�����֎~
FSfclose(pfile); // �t�@�C�������
pfile = FSfopen("DATA.DAT","r"); //�t�@�C���Ǎ��݃��[�h�ŃI�[�v���@
Mode_SD = 1;
iy = 0;
N_Read = 1; //0����while(N_Read !=0)�������݂�����O�ɐ^�ƂȂ胋�[�v���Ă��܂�
EnableIntT45; //�^�C�}45��������
do
{
}while(N_Read !=0); //N_ReaD��0���߂��Ă���iEOF�j�܂ő҂�
FSfclose(pfile); // �t�@�C�������
DisableIntT45;
LATCbits.LATC3 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
lcd_clear();
sprintf(Buf,"%u %u %u %u ",SD[0],SD[1],SD[2],SD[3]);//SD�J�[�h����ǂݍ��f�[�^���t���ɕ\��
lcd_str(Buf);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(Buf,"%u %u %u %u ",SD[4],SD[5],SD[6],SD[7]);//SD�J�[�h����ǂݍ��f�[�^���t���ɕ\��
lcd_str(Buf);
while(1);
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATEbits.LATE7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATEbits.LATE6 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATEbits.LATE5 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATEbits.LATE4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATEbits.LATE3 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATEbits.LATE2 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do
{
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
//HardwareProfile.h �Ƀs���A�T�C���ύX�̏C���������Ȃ��܂��B
/******************************************************************************
*
* Microchip Memory Disk Drive File System
*
******************************************************************************
* FileName: HardwareProfile.h
* Dependencies: None
* Processor: PIC18/PIC24/dsPIC30/dsPIC33/PIC32
* Compiler: C18/C30/C32
* Company: Microchip Technology, Inc.
*
* Software License Agreement
*
* The software supplied herewith by Microchip Technology Incorporated
* (the �Company�E for its PICmicro� Microcontroller is intended and
* supplied to you, the Company�s customer, for use solely and
* exclusively on Microchip PICmicro Microcontroller products. The
* software is owned by the Company and/or its supplier, and is
* protected under applicable copyright laws. All rights are reserved.
* Any use in violation of the foregoing restrictions may subject the
* user to criminal sanctions under applicable laws, as well as to
* civil liability for the breach of the terms and conditions of this
* license.
*
* THIS SOFTWARE IS PROVIDED IN AN �AS IS�ECONDITION. NO WARRANTIES,
* WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT NOT LIMITED
* TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A
* PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. THE COMPANY SHALL NOT,
* IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL OR
* CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.
*
*****************************************************************************/
#ifndef _HARDWAREPROFILE_H_
#define _HARDWAREPROFILE_H_
// Define your clock speed here
// Sample clock speed for PIC18
#if defined (__18CXX)
#define GetSystemClock() 40000000 // System clock frequency (Hz)
#define GetPeripheralClock() GetSystemClock() // Peripheral clock freq.
#define GetInstructionClock() (GetSystemClock() / 4) // Instruction clock freq.
// Sample clock speed for a 16-bit processor
#elif defined (__C30__)
#define GetSystemClock() 32000000
#define GetPeripheralClock() GetSystemClock()
#define GetInstructionClock() (GetSystemClock() / 2)
// Clock values
#define MILLISECONDS_PER_TICK 10 // Definition for use with a tick timer
#define TIMER_PRESCALER TIMER_PRESCALER_8 // Definition for use with a tick timer
#define TIMER_PERIOD 20000 // Definition for use with a tick timer
// Sample clock speed for a 32-bit processor
#elif defined (__PIC32MX__)
// Indicates that the PIC32 clock is running at 48 MHz
//#define RUN_AT_48MHZ
// Indicates that the PIC32 clock is running at 24 MHz
//#define RUN_AT_24MHZ
// Indicates that the PIC32 clock is running at 80 MHz
#define RUN_AT_80MHZ
// Various clock values
#if defined(RUN_AT_48MHZ)
#define GetSystemClock() 48000000UL // System clock frequency (Hz)
#define GetPeripheralClock() 48000000UL // Peripheral clock frequency
#define GetInstructionClock() (GetSystemClock()) // Instruction clock frequency
#elif defined(RUN_AT_24MHZ)
#define GetSystemClock() 24000000UL
#define GetPeripheralClock() 24000000UL
#define GetInstructionClock() (GetSystemClock())
#elif defined(RUN_AT_80MHZ)
#define GetSystemClock() (80000000ul)
#define GetPeripheralClock() (GetSystemClock()/2)
#define GetInstructionClock() (GetSystemClock())
#else
#error Choose a speed
#endif
// Clock values
#define MILLISECONDS_PER_TICK 10 // Definition for use with a tick timer
#define TIMER_PRESCALER TIMER_PRESCALER_8 // Definition for use with a tick timer
#define TIMER_PERIOD 37500 // Definition for use with a tick timer
#endif
// Select your interface type
// This library currently only supports a single physical interface layer at a time
// Description: Macro used to enable the SD-SPI physical layer (SD-SPI.c and .h)
#define USE_SD_INTERFACE_WITH_SPI
// Description: Macro used to enable the CF-PMP physical layer (CF-PMP.c and .h)
//#define USE_CF_INTERFACE_WITH_PMP
// Description: Macro used to enable the CF-Manual physical layer (CF-Bit transaction.c and .h)
//#define USE_MANUAL_CF_INTERFACE
// Description: Macro used to enable the USB Host physical layer (USB host MSD library)
//#define USE_USB_INTERFACE
/*********************************************************************/
/******************* Pin and Register Definitions ********************/
/*********************************************************************/
/* SD Card definitions: Change these to fit your application when using
an SD-card-based physical layer */
#ifdef USE_SD_INTERFACE_WITH_SPI
#ifdef __18CXX
// Sample definition for PIC18 (modify to fit your own project)
// Description: SD-SPI Chip Select Output bit
#define SD_CS LATBbits.LATB3
// Description: SD-SPI Chip Select TRIS bit
#define SD_CS_TRIS TRISBbits.TRISB3
// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTBbits.RB4
// Description: SD-SPI Card Detect TRIS bit
#define SD_CD_TRIS TRISBbits.TRISB4
// Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTAbits.RA4
// Description: SD-SPI Write Protect Check TRIS bit
#define SD_WE_TRIS TRISAbits.TRISA4
// Registers for the SPI module you want to use
// Description: The main SPI control register
#define SPICON1 SSP1CON1
// Description: The SPI status register
#define SPISTAT SSP1STAT
// Description: The SPI buffer
#define SPIBUF SSP1BUF
// Description: The receive buffer full bit in the SPI status register
#define SPISTAT_RBF SSP1STATbits.BF
// Description: The bitwise define for the SPI control register (i.e. _____bits)
#define SPICON1bits SSP1CON1bits
// Description: The bitwise define for the SPI status register (i.e. _____bits)
#define SPISTATbits SSP1STATbits
// Description: The interrupt flag for the SPI module
#define SPI_INTERRUPT_FLAG PIR1bits.SSPIF
// Description: The enable bit for the SPI module
#define SPIENABLE SPICON1bits.SSPEN
/*
// Defines for the FS-USB demo board
// Tris pins for SCK/SDI/SDO lines
#define SPICLOCK TRISBbits.TRISB1
#define SPIIN TRISBbits.TRISB0
#define SPIOUT TRISCbits.TRISC7
// Latch pins for SCK/SDI/SDO lines
#define SPICLOCKLAT LATBbits.LATB1
#define SPIINLAT LATBbits.LATB0
#define SPIOUTLAT LATCbits.LATC7
// Port pins for SCK/SDI/SDO lines
#define SPICLOCKPORT PORTBbits.RB1
#define SPIINPORT PORTBbits.RB0
#define SPIOUTPORT PORTCbits.RC7
*/
// Defines for the HPC Explorer board
// Description: The TRIS bit for the SCK pin
#define SPICLOCK TRISCbits.TRISC3
// Description: The TRIS bit for the SDI pin
#define SPIIN TRISCbits.TRISC4
// Description: The TRIS bit for the SDO pin
#define SPIOUT TRISCbits.TRISC5
// Description: The output latch for the SCK pin
#define SPICLOCKLAT LATCbits.LATC3
// Description: The output latch for the SDI pin
#define SPIINLAT LATCbits.LATC4
// Description: The output latch for the SDO pin
#define SPIOUTLAT LATCbits.LATC5
// Description: The port for the SCK pin
#define SPICLOCKPORT PORTCbits.RC3
// Description: The port for the SDI pin
#define SPIINPORT PORTCbits.RC4
// Description: The port for the SDO pin
#define SPIOUTPORT PORTCbits.RC5
// Will generate an error if the clock speed is too low to interface to the card
#if (GetSystemClock() < 400000)
#error System clock speed must exceed 400 kHz
#endif
#elif defined __PIC24F__
// Description: SD-SPI Chip Select Output bit
#define SD_CS LATBbits.LATB1
// Description: SD-SPI Chip Select TRIS bit
#define SD_CS_TRIS TRISBbits.TRISB1
// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTFbits.RF0
// Description: SD-SPI Card Detect TRIS bit
#define SD_CD_TRIS TRISFbits.TRISF0
// Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTFbits.RF1
// Description: SD-SPI Write Protect Check TRIS bit
#define SD_WE_TRIS TRISFbits.TRISF1
// Registers for the SPI module you want to use
// Description: The main SPI control register
#define SPICON1 SPI1CON1
// Description: The SPI status register
#define SPISTAT SPI1STAT
// Description: The SPI Buffer
#define SPIBUF SPI1BUF
// Description: The receive buffer full bit in the SPI status register
#define SPISTAT_RBF SPI1STATbits.SPIRBF
// Description: The bitwise define for the SPI control register (i.e. _____bits)
#define SPICON1bits SPI1CON1bits
// Description: The bitwise define for the SPI status register (i.e. _____bits)
#define SPISTATbits SPI1STATbits
// Description: The enable bit for the SPI module
#define SPIENABLE SPISTATbits.SPIEN
// Tris pins for SCK/SDI/SDO lines
// Description: The TRIS bit for the SCK pin
#define SPICLOCK TRISFbits.TRISF6
// Description: The TRIS bit for the SDI pin
#define SPIIN TRISFbits.TRISF7
// Description: The TRIS bit for the SDO pin
#define SPIOUT TRISFbits.TRISF8
// Will generate an error if the clock speed is too low to interface to the card
#if (GetSystemClock() < 100000)
#error Clock speed must exceed 100 kHz
#endif
#elif defined (__PIC32MX__)
// Registers for the SPI module you want to use
// #define MDD_USE_SPI_1
#define MDD_USE_SPI_2 //�ύX�ӏ�
//SPI Configuration
#define SPI_START_CFG_1 (PRI_PRESCAL_64_1 | SEC_PRESCAL_8_1 | MASTER_ENABLE_ON | SPI_CKE_ON | SPI_SMP_ON)
#define SPI_START_CFG_2 (SPI_ENABLE)
// Define the SPI frequency
#define SPI_FREQUENCY (20000000)
#if defined MDD_USE_SPI_1
// Description: SD-SPI Chip Select Output bit
#define SD_CS LATBbits.LATB1
// Description: SD-SPI Chip Select TRIS bit
#define SD_CS_TRIS TRISBbits.TRISB1
// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTFbits.RF0
// Description: SD-SPI Card Detect TRIS bit
#define SD_CD_TRIS TRISFbits.TRISF0
// Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTFbits.RF1
// Description: SD-SPI Write Protect Check TRIS bit
#define SD_WE_TRIS TRISFbits.TRISF1
// Description: The main SPI control register
#define SPICON1 SPI1CON
// Description: The SPI status register
#define SPISTAT SPI1STAT
// Description: The SPI Buffer
#define SPIBUF SPI1BUF
// Description: The receive buffer full bit in the SPI status register
#define SPISTAT_RBF SPI1STATbits.SPIRBF
// Description: The bitwise define for the SPI control register (i.e. _____bits)
#define SPICON1bits SPI1CONbits
// Description: The bitwise define for the SPI status register (i.e. _____bits)
#define SPISTATbits SPI1STATbits
// Description: The enable bit for the SPI module
#define SPIENABLE SPICON1bits.ON
// Description: The definition for the SPI baud rate generator register (PIC32)
#define SPIBRG SPI1BRG
// Tris pins for SCK/SDI/SDO lines
// Description: The TRIS bit for the SCK pin
#define SPICLOCK TRISFbits.TRISF6
// Description: The TRIS bit for the SDI pin
#define SPIIN TRISFbits.TRISF7
// Description: The TRIS bit for the SDO pin
#define SPIOUT TRISFbits.TRISF8
//SPI library functions
#define putcSPI putcSPI1
#define getcSPI getcSPI1
#define OpenSPI(config1, config2) OpenSPI1(config1, config2)
#elif defined MDD_USE_SPI_2
// Description: SD-SPI Chip Select Output bit
#define SD_CS LATCbits.LATC3 //�ύX�ӏ�
// #define SD_CS LATBbits.LATB9
// Description: SD-SPI Chip Select TRIS bit
#define SD_CS_TRIS TRISCbits.TRISC3 //�ύX�ӏ�
// #define SD_CS_TRIS TRISBbits.TRISB9
// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTDbits.RD8 //�ύX�ӏ�
// #define SD_CD PORTGbits.RG0
// Description: SD-SPI Card Detect TRIS bit
#define SD_CD_TRIS TRISDbits.TRISD8 //�ύX�ӏ�
//#define SD_CD_TRIS TRISGbits.TRISG0
// Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTDbits.RD9 //�ύX�ӏ�
// #define SD_WE PORTGbits.RG1
// Description: SD-SPI Write Protect Check TRIS bit
#define SD_WE_TRIS TRISDbits.TRISD9 //�ύX�ӏ�
// #define SD_WE_TRIS TRISGbits.TRISG1
// Description: The main SPI control register
#define SPICON1 SPI2CON
// Description: The SPI status register
#define SPISTAT SPI2STAT
// Description: The SPI Buffer
#define SPIBUF SPI2BUF
// Description: The receive buffer full bit in the SPI status register
#define SPISTAT_RBF SPI2STATbits.SPIRBF
// Description: The bitwise define for the SPI control register (i.e. _____bits)
#define SPICON1bits SPI2CONbits
// Description: The bitwise define for the SPI status register (i.e. _____bits)
#define SPISTATbits SPI2STATbits
// Description: The enable bit for the SPI module
#define SPIENABLE SPI2CONbits.ON
// Description: The definition for the SPI baud rate generator register (PIC32)
#define SPIBRG SPI2BRG
// Tris pins for SCK/SDI/SDO lines
// Description: The TRIS bit for the SCK pin
#define SPICLOCK TRISGbits.TRISG6
// Description: The TRIS bit for the SDI pin
#define SPIIN TRISGbits.TRISG7
// Description: The TRIS bit for the SDO pin
#define SPIOUT TRISGbits.TRISG8
//SPI library functions
#define putcSPI putcSPI2
#define getcSPI getcSPI2
#define OpenSPI(config1, config2) OpenSPI2(config1, config2)
#endif
// Will generate an error if the clock speed is too low to interface to the card
#if (GetSystemClock() < 100000)
#error Clock speed must exceed 100 kHz
#endif
#endif
#endif
#ifdef USE_CF_INTERFACE_WITH_PMP
/* CompactFlash-PMP card definitions: change these to fit your application when
using the PMP module to interface with CF cards */
#ifdef __18CXX
#error The PIC18 architecture does not currently support PMP interface to CF cards
#elif defined __dsPIC30F__
// Sample dsPIC30 defines
// Description: The output latch for the CF Reset signal
#define CF_PMP_RST _RD0
// Description: The TRIS bit for the CF Reset signal
#define CF_PMP_RESETDIR _TRISD0
// Description: The input port for the CF Ready signal
#define CF_PMP_RDY _RD12
// Description: The TRIS bit for the CF Ready signal
#define CF_PMP_READYDIR _TRISD12
// Description: The input port for the CF card detect signal
#define CF_PMP_CD1 _RC4
// Description: The TRIS bit for the CF card detect signal
#define CF_PMP_CD1DIR _TRISC4
#elif defined __dsPIC33F__
// Sample dsPIC33 defines
// Description: The output latch for the CF Reset signal
#define CF_PMP_RST _RD0
// Description: The TRIS bit for the CF Reset signal
#define CF_PMP_RESETDIR _TRISD0
// Description: The input port for the CF Ready signal
#define CF_PMP_RDY _RD12
// Description: The TRIS bit for the CF Ready signal
#define CF_PMP_READYDIR _TRISD12
// Description: The input port for the CF card detect signal
#define CF_PMP_CD1 _RC4
// Description: The TRIS bit for the CF card detect signal
#define CF_PMP_CD1DIR _TRISC4
#elif defined __PIC24F__
// Default case for PIC24F
// Description: The output latch for the CF Reset signal
#define CF_PMP_RST LATDbits.LATD0
// Description: The TRIS bit for the CF Reset signal
#define CF_PMP_RESETDIR TRISDbits.TRISD0
// Description: The input port for the CF Ready signal
#define CF_PMP_RDY PORTDbits.RD12
// Description: The TRIS bit for the CF Ready signal
#define CF_PMP_READYDIR TRISDbits.TRISD12
// Description: The input port for the CF card detect signal
#define CF_PMP_CD1 PORTCbits.RC4
// Description: The TRIS bit for the CF card detect signal
#define CF_PMP_CD1DIR TRISCbits.TRISC4
#endif
// Description: Defines the PMP data bus direction register
#define MDD_CFPMP_DATADIR TRISE
#endif
#ifdef USE_MANUAL_CF_INTERFACE
// Use these definitions with CF-Bit transaction.c and .h
// This will manually perform parallel port transactions
#ifdef __18CXX
// Address lines
// Description: The CF address bus output latch register (for PIC18)
#define ADDBL LATA
// Description: The CF address bus TRIS register (for PIC18)
#define ADDDIR TRISA
// Data bus
// Description: The Manual CF data bus port register
#define MDD_CFBT_DATABIN PORTD
// Description: The Manual CF data bus output latch register
#define MDD_CFBT_DATABOUT LATD
// Description: The Manual CF data bus TRIS register
#define MDD_CFBT_DATADIR TRISD
// control bus lines
// Description: The CF card chip select output latch bit
#define CF_CE LATEbits.LATE1
// Description: The CF card chip select TRIS bit
#define CF_CEDIR TRISEbits.TRISE1
// Description: The CF card output enable strobe latch bit
#define CF_OE LATAbits.LATA5
// Description: The CF card output enable strobe TRIS bit
#define CF_OEDIR TRISAbits.TRISA5
// Description: The CF card write enable strobe latch bit
#define CF_WE LATAbits.LATA4
// Description: The CF card write enable strobe TRIS bit
#define CF_WEDIR TRISAbits.TRISA4
// Description: The CF card reset signal latch bit
#define CF_BT_RST LATEbits.LATE0
// Description: The CF card reset signal TRIS bit
#define CF_BT_RESETDIR TRISEbits.TRISE0
// Description: The CF card ready signal port bit
#define CF_BT_RDY PORTEbits.RE2
// Description: The CF card ready signal TRIS bit
#define CF_BT_READYDIR TRISEbits.TRISE2
// Description: The CF card detect signal port bit
#define CF_BT_CD1 PORTCbits.RC2
// Description: The CF card detect signal TRIS bit
#define CF_BT_CD1DIR TRISCbits.TRISC2
#elif defined __dsPIC30F__
// Address lines
// Description: The CF address bus bit 0 output latch definition (for PIC24/30/33/32)
#define ADDR0 _LATB15
// Description: The CF address bus bit 1 output latch definition (for PIC24/30/33/32)
#define ADDR1 _LATB14
// Description: The CF address bus bit 2 output latch definition (for PIC24/30/33/32)
#define ADDR2 _LATG9
// Description: The CF address bus bit 3 output latch definition (for PIC24/30/33/32)
#define ADDR3 _LATG8
// Description: The CF address bus bit 0 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS0 _TRISB15
// Description: The CF address bus bit 1 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS1 _TRISB14
// Description: The CF address bus bit 2 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS2 _TRISG9
// Description: The CF address bus bit 3 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS3 _TRISG8
// Data bus
// Description: The Manual CF data bus port register
#define MDD_CFBT_DATABIN PORTE
// Description: The Manual CF data bus output latch register
#define MDD_CFBT_DATABOUT PORTE
// Description: The Manual CF data bus TRIS register
#define MDD_CFBT_DATADIR TRISE
// control bus lines
// Description: The CF card chip select output latch bit
#define CF_CE _RD11
// Description: The CF card chip select TRIS bit
#define CF_CEDIR _TRISD11
// Description: The CF card output enable strobe latch bit
#define CF_OE _RD5
// Description: The CF card output enable strobe TRIS bit
#define CF_OEDIR _TRISD5
// Description: The CF card write enable strobe latch bit
#define CF_WE _RD4
// Description: The CF card write enable strobe TRIS bit
#define CF_WEDIR _TRISD4
// Description: The CF card reset signal latch bit
#define CF_BT_RST _RD0
// Description: The CF card reset signal TRIS bit
#define CF_BT_RESETDIR _TRISD0
// Description: The CF card ready signal port bit
#define CF_BT_RDY _RD12
// Description: The CF card ready signal TRIS bit
#define CF_BT_READYDIR _TRISD12
// Description: The CF card detect signal port bit
#define CF_BT_CD1 _RC4
// Description: The CF card detect signal TRIS bit
#define CF_BT_CD1DIR _TRISC4
#elif defined __dsPIC33F__
// Address lines
// Description: The CF address bus bit 0 output latch definition (for PIC24/30/33/32)
#define ADDR0 _LATB15
// Description: The CF address bus bit 1 output latch definition (for PIC24/30/33/32)
#define ADDR1 _LATB14
// Description: The CF address bus bit 2 output latch definition (for PIC24/30/33/32)
#define ADDR2 _LATG9
// Description: The CF address bus bit 3 output latch definition (for PIC24/30/33/32)
#define ADDR3 _LATG8
// Description: The CF address bus bit 0 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS0 _TRISB15
// Description: The CF address bus bit 1 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS1 _TRISB14
// Description: The CF address bus bit 2 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS2 _TRISG9
// Description: The CF address bus bit 3 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS3 _TRISG8
// Data bus
// Description: The Manual CF data bus port register
#define MDD_CFBT_DATABIN PORTE
// Description: The Manual CF data bus output latch register
#define MDD_CFBT_DATABOUT PORTE
// Description: The Manual CF data bus TRIS register
#define MDD_CFBT_DATADIR TRISE
// control bus lines
// Description: The CF card chip select output latch bit
#define CF_CE _RD11
// Description: The CF card chip select TRIS bit
#define CF_CEDIR _TRISD11
// Description: The CF card output enable strobe latch bit
#define CF_OE _RD5
// Description: The CF card output enable strobe TRIS bit
#define CF_OEDIR _TRISD5
// Description: The CF card write enable strobe latch bit
#define CF_WE _RD4
// Description: The CF card write enable strobe TRIS bit
#define CF_WEDIR _TRISD4
// Description: The CF card reset signal latch bit
#define CF_BT_RST _RD0
// Description: The CF card reset signal TRIS bit
#define CF_BT_RESETDIR _TRISD0
// Description: The CF card ready signal port bit
#define CF_BT_RDY _RD12
// Description: The CF card ready signal TRIS bit
#define CF_BT_READYDIR _TRISD12
// Description: The CF card detect signal port bit
#define CF_BT_CD1 _RC4
// Description: The CF card detect signal TRIS bit
#define CF_BT_CD1DIR _TRISC4
#elif defined __PIC24F__
// Address lines
// Description: The CF address bus bit 0 output latch definition (for PIC24/30/33/32)
#define ADDR0 LATBbits.LATB15
// Description: The CF address bus bit 1 output latch definition (for PIC24/30/33/32)
#define ADDR1 LATBbits.LATB14
// Description: The CF address bus bit 2 output latch definition (for PIC24/30/33/32)
#define ADDR2 LATGbits.LATG9
// Description: The CF address bus bit 3 output latch definition (for PIC24/30/33/32)
#define ADDR3 LATGbits.LATG8
// Description: The CF address bus bit 0 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS0 TRISBbits.TRISB15
// Description: The CF address bus bit 1 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS1 TRISBbits.TRISB14
// Description: The CF address bus bit 2 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS2 TRISGbits.TRISG9
// Description: The CF address bus bit 3 TRIS definition (for PIC24/30/33/32)
#define ADRTRIS3 TRISGbits.TRISG8
// Data bus
// Description: The Manual CF data bus port register
#define MDD_CFBT_DATABIN PORTE
// Description: The Manual CF data bus output latch register
#define MDD_CFBT_DATABOUT PORTE
// Description: The Manual CF data bus TRIS register
#define MDD_CFBT_DATADIR TRISE
// control bus lines
// Description: The CF card chip select output latch bit
#define CF_CE PORTDbits.RD11
// Description: The CF card chip select TRIS bit
#define CF_CEDIR TRISDbits.TRISD11
// Description: The CF card output enable strobe latch bit
#define CF_OE PORTDbits.RD5
// Description: The CF card output enable strobe TRIS bit
#define CF_OEDIR TRISDbits.TRISD5
// Description: The CF card write enable strobe latch bit
#define CF_WE PORTDbits.RD4
// Description: The CF card write enable strobe TRIS bit
#define CF_WEDIR TRISDbits.TRISD4
// Description: The CF card reset signal latch bit
#define CF_BT_RST PORTDbits.RD0
// Description: The CF card reset signal TRIS bit
#define CF_BT_RESETDIR TRISDbits.TRISD0
// Description: The CF card ready signal port bit
#define CF_BT_RDY PORTDbits.RD12
// Description: The CF card ready signal TRIS bit
#define CF_BT_READYDIR TRISDbits.TRISD12
// Description: The CF card detect signal port bit
#define CF_BT_CD1 PORTCbits.RC4
// Description: The CF card detect signal TRIS bit
#define CF_BT_CD1DIR TRISCbits.TRISC4
#endif
#endif
#include <uart2.h>
#endif
//SD-SPI.c�@�t�@�C���̏C���ӏ�
//SD�J�[�h�̃\�P�b�g�̃��C�g�v���e�N�g�̓��삪�t�̂��̂�����܂��B2010�N12���̃}�C�N���`�b�v�̃��C�u������
//���C�g�v���e�N�g�̃��[�h�ŁAPIC����݂ĉ��L�̃\�P�b�g��z�肵�Ăł��Ă��܂��B
//�@�@�E���C�g�v���e�N�g����Ă���ꍇ�@�c�c�@�P�i�{3.3V�j
//�@�@�E���C�g�v���e�N�g����Ă��Ȃ��ꍇ�c�c�@�O�i0V�j
//�T���n���g����CK29�̏ꍇ��L�_���Ƃ͋t�Ȃ̂ʼn��L�̂悤�Ƀ\�[�X�R�[�h���ꕔ�ύX����K�v������܂��B
//���L�͏C����̃R�[�h�ł��B
***************************************************************************************/
BYTE MDD_SDSPI_WriteProtectState(void)
{
return(!SD_WE); //�C���O�̺��ށ@ return(SD_WE);
//�I���lj��ɂȂ��Ă��܂��B
}
/****************************************************************************
�@
�����쌋�ʁ�
�@�@
���@SD�J�[�h�ǂݏ����@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��PIC32MX795F512L�@�@ �`�����l���S��
�@PIC32MX795F512L�̃`�����l��4�iSPI4)�ɂ��SD�J�[�h��Ǐ�������ꍇ�́AputcSPI4( ) , getcSPI4(
) , OpenSPI4( ) ���@SD�J�[�h�̃��C�u�����Ƃ��ėp�ӂ���Ă��Ȃ��̂Ł@ SpiPutC(SPI_CHANNEL4,
), SpiGetC(SPI_CHANNEL4, ) SpiChnOpen(SPI_CHANNEL4, ). �Ȃǂ����� ���C�u�����t�@�C��SD-SPI.c. ���ύX����K�v������悤�ł��B�@�ȉ��ɂ��̗���Љ�܂��B
������i�̎d�l��
�@1.�@PIC32MX795512L�̃`�����l��4�iSPI4�j��p��SD�J�[�h�̓ǂݏ����������Ȃ�
�@2.�@SD�J�[�h��12345�������݁A�����Ǐo���t���ɕ\������
������i��H�}���i���@��H�}��pdf�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
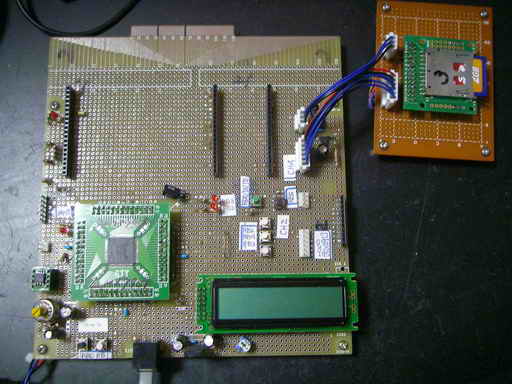
�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
#include <p32xxxx.h>
#include <plib.h> // PIC32 peripheral library
#include "1lcd_lib_C32.h"
#include "FSIO.h"
// configuration CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
unsigned int Buf_Input[3]; //SD�J�[�h�������ݒl
unsigned int Buf_SD[3]; //SD�J�[�h�Ǎ��ݒl
int N_Write; //�������݉߂�l
FSFILE* pfile; //SD�J�[�h�̃t�@�C���|�C���^
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
// INTEnableSystemMultiVectoredInt(); //�}���`�x�N�^�������荞����
mJTAGPortEnable(DEBUG_JTAGPORT_OFF); //JTAG������//DDPCONbits.JTAGEN = 0; //I/O�|�[�g�Ƃ���RA0�ARA1�ARA4�ARA5�������ꍇ�K�{
AD1PCFG =0xFFFF; //B�|�[�g�F�A�i���O�@���@�f�W�^��//��ԕω��s���Ƃ��Ďg���ꍇ�K�{
TRISBbits.TRISB15 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB14 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB13 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB12 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA10 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA9 = 0; //�L�����N�^�t���|�[�g�ݒ�
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"SD W/R Start2 !!");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���\��
delay_ms(1000);
//// SD�J�[�h�̎����ƃt�H�[�}�b�g�ς��`�F�b�N
SD_CS = 0; // LATCbits.LATC3 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
while(!FSInit()); //SD�J�[�h�̎����ƃt�H�[�}�b�g�ς��`�F�b�N
SD_CS = 1; // LATCbits.LATC3 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
lcd_clear(); // �S����
sprintf(Buf,"Initialize OK !!");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���\��
delay_ms(1000);
//// �t�@�C�����������݃��[�h�ŃI�[�v��
SD_CS = 0; // LATCbits.LATC3 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
pfile = FSfopen("DATA.DAT","w"); //�t�@�C���������݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
if(pfile == NULL) //�t�@�C���I�[�v�����s�̏ꍇ�iSD�J�[�h�Ƀ��C�g�v���e�N�g������Ă���ꍇ�Ȃǁj
{
lcd_clear();
sprintf(Buf,"W_ModeOpen Error"); //�t����"W_ModeOpen Error" ��\��
lcd_str(Buf);
return 0;
}
else //�t�@�C���I�[�v�������Ȃ�
{
lcd_clear();
sprintf(Buf,"FileOpen OK !!"); //�t����"W_ModeOpen OK" ��\��
lcd_str(Buf);
lcd_cmd(0xC0); //2�s�ڂ�
sprintf(Buf," (Write Mode)");
lcd_str(Buf);
delay_ms(1000);
}
Buf_Input[0] = 12345 ; //�������݃f�[�^���Z�b�g
// Buf_Input[0] = 12345; //�������݃f�[�^���Z�b�g
N_Write = FSfwrite((const void*)Buf_Input,sizeof(Buf_Input),1,pfile);//�t�@�C���Ƀf�[�^��������
if(N_Write == 1) //����ȏꍇ�F�������݉��Ԃ��Ă���
{
lcd_clear();
sprintf(Buf,"Write OK !!"); //�t����"Write OK !" ��\��
lcd_str(Buf);
delay_ms(1000);
}
else //�ُ�ȏꍇ
{
lcd_clear();
sprintf(Buf,"Write NG !!"); //�t����"Write NG !" ��\��
lcd_str(Buf);
return 0;
}
FSfclose(pfile); // �t�@�C�������
SD_CS = 1; // LATCbits.LATC3 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
//// SD�J�[�h��Ǎ��݃��[�h�ŃI�[�v��
SD_CS = 0; // LATCbits.LATC3 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
pfile = FSfopen("DATA.DAT","r"); //�t�@�C���Ǎ��݃��[�h�ŃI�[�v���@
if(pfile == NULL)
{
lcd_clear();
sprintf(Buf,"R_ModeOpen Error"); //�t����"R_ModeOpen Error"��\��
lcd_str(Buf);
return 0;
}
else
{
lcd_clear();
sprintf(Buf,"FileOpen OK !!"); //�t����"W_ModeOpen OK" ��\��
lcd_str(Buf);
lcd_cmd(0xC0); //2�s�ڂ�
sprintf(Buf," (Read Mode)");
lcd_str(Buf);
delay_ms(1000);
}
FSfread(Buf_SD,sizeof(Buf_SD),1,pfile); //�t�@�C������f�[�^�Ǎ���
FSfclose(pfile); //�t�@�C�������
SD_CS = 1; // LATCbits.LATC3 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
//// �Ǎ��݃f�[�^�̕\��
lcd_clear();
sprintf(Buf,"SD_DATA=%u",Buf_SD[0]); //SD�J�[�h����ǂݍ��f�[�^���t���ɕ\��
lcd_str(Buf);
lcd_cmd(0xC0); //2�s�ڂ�
sprintf(Buf,"795 ch4 was used");
lcd_str(Buf);
//------------------------------------------------------------------------------------------------------------------
//HardwareProfile.h
//Microchip Memory Disk Drive File System
#ifndef _HARDWAREPROFILE_H_
#define _HARDWAREPROFILE_H_
//�N���b�N���g���ݒ� // Define your clock speed here
#define RUN_AT_80MHZ
#if defined(RUN_AT_48MHZ)
#define GetSystemClock() 48000000UL // System clock frequency (Hz)
#define GetPeripheralClock() 48000000UL // Peripheral clock frequency
#define GetInstructionClock() (GetSystemClock()) // Instruction clock frequency
#elif defined(RUN_AT_24MHZ)
#define GetSystemClock() 24000000UL
#define GetPeripheralClock() 24000000UL
#define GetInstructionClock() (GetSystemClock())
#elif defined(RUN_AT_80MHZ)
#define GetSystemClock() (80000000ul) //�V�X�e���N���b�N
#define GetPeripheralClock() (GetSystemClock()/2) //�y���t�F�����N���b�N
#define GetInstructionClock() (GetSystemClock()) //�C���X�g���N�V�����N���b�N
#else
#error Choose a speed
#endif
// Clock values
#define MILLISECONDS_PER_TICK 10 // Definition for use with a tick timer
#define TIMER_PRESCALER TIMER_PRESCALER_8 // Definition for use with a tick timer
#define TIMER_PERIOD 37500 // Definition for use with a tick timer
// Description: Macro used to enable the SD-SPI physical layer (SD-SPI.c and .h)
#define USE_SD_INTERFACE_WITH_SPI
//SD �J�[�h�I���E���o
//CS�F�`�b�v�Z���N�g // Description: SD-SPI Chip Select Output bit
#define SD_CS LATDbits.LATD14 //LATCbits.LATC3
#define SD_CS_TRIS TRISDbits.TRISD14 // TRISCbits.TRISC3
//CD�F�J�[�h�f�B�e�N�g�@// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTFbits.RF12 // PORTDbits.RD8
#define SD_CD_TRIS TRISFbits.TRISF12 // TRISDbits.TRISD8
//WE�F���C�g�C�l�[�u�� Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTAbits.RA1
#define SD_WE_TRIS TRISAbits.TRISA1
//SPI�R���t�B�M�����[�V���� //SPI Configuration
#define SPI_START_CFG_1 (PRI_PRESCAL_64_1 | SEC_PRESCAL_8_1 | MASTER_ENABLE_ON | SPI_CKE_ON | SPI_SMP_ON)
#define SPI_START_CFG_2 (SPI_ENABLE)
#define SPI_FREQUENCY (400000) //SPI���g�� //Define the SPI frequency
// #define SPI_FREQUENCY (20000000) //SPI���g�� //Define the SPI frequency
//�`�����l��4�F
#define SPICON1 SPI4CON //���䃌�W�X�^
#define SPISTAT SPI4STAT //SPI�X�e�[�^�X���W�X�^ status register
#define SPIBUF SPI4BUF //SPI�o�b�t�@���W�X�^
#define SPISTAT_RBF SPI4STATbits.SPIRBF //��M�o�b�t�@���t�r�b�g// The receive buffer full bit in the SPI status register
#define SPICON1bits SPI4CONbits //�r�b�g�P�ʂ̒�`�i���䃌�W�X�^�jThe bitwise define for the SPI control register (i.e. _____bits)
#define SPISTATbits SPI4STATbits //�r�b�g�P�ʂ̒�`�i�X�e�[�^�X���W�X�^�j //The bitwise define for the SPI status register (i.e. _____bits)
#define SPIENABLE SPI4CONbits.ON //SPI���W���[���@�C�l�[�u���r�b�g //The enable bit for the SPI module
#define SPIBRG SPI4BRG //�{�[���[�g�W�F�l���[�^//The definition for the SPI baud rate generator register (PIC32)
//SCK,SDI,SDO�s���A�T�C�� //Tris pins for SCK/SDI/SDO lines
#define SPICLOCK TRISFbits.TRISF12 //TRISGbits.TRISG6 //SCK
#define SPIIN TRISFbits.TRISF4 //PIC��SDI4 // TRISGbits.TRISG7 //PIC��SDI2
#define SPIOUT TRISFbits.TRISF5 //PIC��SDO4 // TRISGbits.TRISG8 //SDO
//SPI���C�u������ //library functions
// #define putcSPI putcSPI4 //putcSPI2
// #define getcSPI getcSPI4 //getcSPI2
// #define OpenSPI(config1, config2) OpenSPI4(config1, config2) //OpenSPI2(config1, config2)
//�V�X�e���N���b�N���x������ꍇ�̃G���[�\�� // Will generate an error if the clock speed is too low to interface to the card
#if (GetSystemClock() < 100000)
#error Clock speed must exceed 100 kHz
#endif
#include <uart2.h>
#endif
//-------------------------------------------------------------------------------------------------------------------------------
//SD-SPI.c
//SD-SPI.c�t�@�C���́@�ȉ���ύX���Ă��܂��B
........
........
void InitSPISlowMode(void)
{
#if defined __C30__ || defined __C32__
#ifdef __PIC32MX__
SpiChnOpen(SPI_CHANNEL4,SPI_OPEN_MSTEN|SPI_OPEN_CKP_HIGH|SPI_OPEN_SMP_END|SPI_OPEN_MODE8,128);
//OpenSPI(SPI_START_CFG_1, SPI_START_CFG_2);
SPIBRG = SPICalutateBRG(GetPeripheralClock(), 400000);
#else //else C30 = PIC24/dsPIC devices
WORD spiconvalue = 0x0003;
WORD timeout;
.......
.......
}
.......
.......
BYTE MDD_SDSPI_ReadMedia(void)
{
#ifdef __C32__
SpiChnPutC(SPI_CHANNEL4 , (BYTE)0xFF); //putcSPI((BYTE)0xFF);
return SpiChnGetC(SPI_CHANNEL4); //return (BYTE)getcSPI();
#elif defined __18CXX
BYTE clear;
clear = SPIBUF;
SPI_INTERRUPT_FLAG = 0;
SPIBUF = 0xFF;
.........
.........
}
unsigned char WriteSPIM( unsigned char data_out )
{
#ifdef __PIC32MX__
BYTE clear;
SpiChnPutC(SPI_CHANNEL4 , (BYTE)data_out); //putcSPI((BYTE)data_out);
clear = SpiChnGetC(SPI_CHANNEL4); // clear = getcSPI();
return ( 0 ); // return non-negative#
#elif defined __18CXX
BYTE clear;
clear = SPIBUF;
SPI_INTERRUPT_FLAG = 0;
SPIBUF = data_out;
........
........
}
.......
.......
//----------------------------------------------------------------------------------------
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
//#include <proc/p32mx795f512l.h> //MX795�̓C�j�V�����C�Y���[�v�����Ȃ�
//#include <proc/p32mx360f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATAbits.LATA9 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATAbits.LATA10 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//----------------------------------------------------------------------------------------
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do
{
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@�����쌋�ʁ�

SD�J�[�h�ǂݏ����@�@�@�@��PIC32MZ2048ECH100�ҁ�
�@Harmony���g���ā@SD�J�[�h�̓ǂݏ������s���ꍇ�A�@�t�@�C�����Ƃ��ā@�����O�t�@�C�����������܂��B
�@
������i�̎d�l��
�@1.�@PIC32MZ�ƃn�[���j�[������SD�J�[�h�̓ǂݏ����������Ȃ�
�@2.�@�t�@�C�����́@myFileName01.txt�@�Ƃ���
�@3.�@SD�J�[�h���J�[�h�X���b�g�ɑ}������Ă��邩�`�F�b�N���@�t���ɕ\�����s��
�@4.�@�t�@�C�����I�[�v���ł�����t���ɕ\������B
�@5.�@�t�@�C�����@�㏑���̃��[�h�ŊJ���@�hHellow Worold !!" �̃e�L�X�g���t�@�C���ɏ�������
�@6.�@�t�@�C�������
�@7.�@�t�@�C����ǂݍ��݃��[�h�ŊJ���A�������܂�Ă�����e���t���ɕ\������
�@
�@�J�����@Harmony ver 1.02�@�@�@�@XC32 ver.1.34 �@�@�@MPLABX�@ver.2.35 �@�@PIC32MZ2048ECH100
�@revision 5
������i�̉�H�}���@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain().c
//----------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//---------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
#include "1lcd_lib_C32.h"
int delay_Clock = 200000000; //200MHz
char Buf[17]; //1�t���\���o�b�t�@�[
int SdMode = 0; //SD�J�[�h�ɑ��鑀�샂�[�h
unsigned int Buf_Input[3]; //SD�J�[�h�������ݒl
char Hellow[] = "Hellow World !!";
char myFileName01[] = "myFileName01.txt";
unsigned int Buf_SD[3]; //SD�J�[�h�Ǎ��ݒl
int N_Write; //�������݉߂�l
SYS_FS_HANDLE fileHandle; //�t�@�C���n���h��
SYS_FS_HANDLE fileHandle2; //�t�@�C���n���h��
char tempBuf[20];
char tempBuf2[20];
char tempBuf3[20];
int eof;
int size;
char* str1;
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"SD card Start !! ");//
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf," "); //
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(2000);
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
int ix = 0;
switch(SdMode)
{
//-------------------------------------------------------------------------------------------------
case 0: //�J�[�h�}�����o�E���C�g�v���e�N�g�`�F�b�N
if(SYS_FS_Mount("/dev/mmcblka1", "/mnt/myDrive", FAT, 0, NULL) != 0) //�t�@�C���V�X�e�������ڂ���Ă��邩�H
//mmcblka1:SD�J�[�h�@//�ύX�s�� //myDrive: �ύX�s��
{ //���s�̏ꍇ //�J�[�h���}�E���g����Ă��Ă�8��ȏ���s�����
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"SD notMounted ");//
lcd_str(Buf); //�t���\��
SdMode = 0;
}
else
{ //�����̏ꍇ
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"SD mounted ");//
lcd_str(Buf); //�t���\��
delay_ms(2000);
//���C�g�v���e�N�g���`�F�b�N
if(PORTBbits.RB9 != 0) //���C�g�v���e�N�g�̏ꍇ // writeProtectStatus = DRV_SDCARD_WriteProtectionIsEnabled(fileHandle);
// if(PORTFbits.RF1 != 0) //���C�g�v���e�N�g�̏ꍇ // writeProtectStatus = DRV_SDCARD_WriteProtectionIsEnabled(fileHandle);
{
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"WriteProtected "); //�t����"Write OK !" ��\��
lcd_str(Buf);
while(1);
}
else
{ //���C�g�v���e�N�g����������Ă���ꍇ
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"WriteReleased "); //�t����"Write OK !" ��\��
lcd_str(Buf);
delay_ms(3000);
}
SdMode = 1;
}
break;
//--------------------------------------------------------------------------------------------
case 1: // �t�@�C�����������݃��[�h�ŃI�[�v�� �A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
fileHandle = SYS_FS_FileOpen(myFileName01, (SYS_FS_FILE_OPEN_WRITE));
if(fileHandle == SYS_FS_HANDLE_INVALID)
{ //�t�@�C���I�[�v���G���[�̏ꍇ
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"FileOpen_w�@failed ");//
lcd_str(Buf); //�t���\��
while(1);
}
else
{
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"FileOpen_w OK !! "); //�t����"W_ModeOpen OK" ��\��
lcd_str(Buf); //�t���\��
delay_ms(2000);
SdMode = 2;
}
break;
//-------------------------------------------------------------------------------------------
case 2: //�f�[�^�̏�������
N_Write = SYS_FS_FileWrite(fileHandle, Hellow, sizeof(Hellow));//�t�@�C���Ƀf�[�^��������
if(N_Write != -1) //����ȏꍇ�F�������݉��Ԃ��Ă���
{
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"Write OK !! "); //�t����"Write OK !" ��\��
lcd_str(Buf);
delay_ms(2000);
}
else //�ُ�ȏꍇ
{
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"Write NG !! "); //�t����"Write NG !" ��\��
lcd_str(Buf);
while(1);
}
SYS_FS_FileClose(fileHandle); //�t�@�C���N���[�Y
SdMode = 3;
break;
//------------------------------------------------------------------------------------------
case 3: //�Ǐo���t�@�C���I�[�v��
fileHandle2 = SYS_FS_FileOpen(myFileName01, (SYS_FS_FILE_OPEN_READ));
if(fileHandle2 == -1) //�t�@�C���I�[�v���@���s�̏ꍇ
//if(fileHandle2 == SYS_FS_HANDLE_INVALID) //�t�@�C���I�[�v���@���s�̏ꍇ
{
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"FileOpen_r failed");//
lcd_str(Buf); //�t���\��
while(1);
}
else SdMode = 4;
break;
//---------------------------------------------------------------
case 4: //�t�@�C���Ǐo���E�\��
do
{
SYS_FS_FileRead(fileHandle2, tempBuf, 1); //1�o�C�g�ÂǏo��
eof = SYS_FS_FileEOF(fileHandle2); //EOF�`�F�b�N
if(eof != true)
{
tempBuf2[ix] = tempBuf[0];
ix++;
}
}while(eof != true); //�t�@�C���G���h�łȂ��ꍇ�́A�J��Ԃ��ǂ�
tempBuf2[ix] = '\0'; //������I�[����
SYS_FS_FileClose(fileHandle2); //�t�@�C�������
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"%s ",myFileName01); //�t����"Write OK !" ��\��
lcd_str(Buf);
lcd_cmd(0xC0); //2�ڂ̐擪��
sprintf(tempBuf3,"%s ",tempBuf2);
lcd_str(tempBuf3);
SdMode = 5;
break;
case 5:
delay_ms(10000);
break;
//------------------------------------------------------------------------------
default:
break;
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//----------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "system_definitions.h"
#include "app.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
//-----------------------------------------------------------------------
//DEVCFG0���W�X�^
#pragma config EJTAGBEN = NORMAL
#pragma config DBGPER = ALLOW_PG2
#pragma config FSLEEP = OFF
#pragma config FECCCON = OFF_UNLOCKED
#pragma config BOOTISA = MIPS32
#pragma config TRCEN = OFF
#pragma config ICESEL = ICS_PGx2
#pragma config JTAGEN = OFF //JTAG �|�[�g Disable
#pragma config DEBUG = OFF
//----------------------------------------------------------------------
//DEVCFG1���W�X�^
#pragma config FNOSC = SPLL //PLL��H(�V�X�e��PLL�j�I�� //�V�X�e�����U��H //����FRC(8MHz�j�I���̏ꍇ�FFNOSC = FRCDIV //Oscillator Selection Bits (Fast RC Osc w/Div-by-N (FRCDIV))
#pragma config FDMTEN = OFF //�f�b�h�}���^�C�}�@OFF (Deadman Timer is disabled)
//#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // �����U��OFF //Secondary Oscillator Enable (Disable SOSC)
#pragma config IESO = OFF //�E�F�C�N�A�b�v����2�i���x�X�^�[�g�A�b�v�@// Internal/External Switch Over (Disabled)
#pragma config POSCMOD = HS //HS: �n�C�X�s�[�h���]�l�[�^���[�h // HS(High Speed Resonator Operation) Oscillator mode selected
//EC: �O�����U�� //EC(External Clock Input Operation) mode selected // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF //OSCCO�s���o�͖���
#pragma config FCKSM = CSECME //�N���b�N���U�F�ؑy�у��j�^�L�� //�唭�U�편�ׂ�FRC(�����������U��j�ɐؑ� //FSCM�iFail Safe Clock Monitor)����
#pragma config FWDTEN = OFF // �E�H�b�`�h�b�N�^�C�}�@OFF //Watchdog Timer Disable
//#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
//#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
//#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
//#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
//--------------------------------------------------------------------------------------------------------------------
// DEVCFG2���W�X�^
//�V�X�e���N���b�N�F200MHz
//�y���t�F�������g���F//default: 100MHz //PBxDIV��8�n�����ɐݒ�ύX��
//PBxDIV: PERIPHERAL BUS CLOCK DIVISOR CONTROL ���W�X�^��PBDIV<6:0>: Peripheral Bus Clock Divisor Control �r�b�g�Őݒ�
#pragma config FPLLRNG = RANGE_5_10_MHZ //PLL Input���g�����͔͈͐ݒ�// System PLL Input Range (5-10 MHz Input) �@//8(= 24/3)MHz��
#pragma config FPLLIDIV = DIV_3 //PLL���͑��ł̕����F 1/3 // PLL�@Input���g�� = 24MH���@���@3�@���@8MHz // System PLL Input Divider (1x Divider)
//#pragma config FPLLICLK = PLL_POSC //�唭�U��H�I���@//����FRC�i8MHz�j�̏ꍇ��FPLLICLK = PLL_FRC// System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLICLK = PLL_FRC //�����������U��I�� //�������@�o�O�L�@�唭�U��H�I���̎��AFPLLICLK = PLL_POSC�ł͂Ȃ�FPLLICLK = PLL_FRC��I������B(at ver.1.33 XC32)
#pragma config FPLLMULT = MUL_50 //PLL�{���F50�{�@//8MHz x 50 = 400MHz //System PLL Multiplier (PLL Multiply by 50)
#pragma config FPLLODIV = DIV_2 //PLL�o�͑��ł̕����F 1/2 //�V�X�e���N���b�N�@=�@400MHz ���@2�@=�@200MH��
#pragma config UPLLFSEL = FREQ_24MHZ //USB��PLL���͂��@24MHz��12MHz�ɕϊ��@// USB PLL Input Frequency Selection (USB PLL input is 12 MHz)
#pragma config UPLLEN = ON //USB��PLL�ϊ��F�C�l�[�u���@// USB PLL Enable (USB PLL is enabled)
//--------------------------------------------------------------------------------------------------------------------------
//DEVCFG3���W�X�^
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = ON
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="DRV_Timer Configuration">
/*** TMR Driver Initialization Data ***/
const DRV_TMR_INIT drvTmr0InitData =
{
.moduleInit.sys.powerState = DRV_TMR_POWER_STATE_IDX0,
.tmrId = DRV_TMR_PERIPHERAL_ID_IDX0,
.clockSource = DRV_TMR_CLOCK_SOURCE_IDX0,
.prescale = DRV_TMR_PRESCALE_IDX0,
.mode = DRV_TMR_OPERATION_MODE_IDX0,
.interruptSource = DRV_TMR_INTERRUPT_SOURCE_IDX0,
.asyncWriteEnable = false,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="DRV_SPI Configuration">
/*** SPI Driver Initialization Data ***/
/*** Index 0 ***/
DRV_SPI_INIT drvSpi0InitData =
{
.spiId = DRV_SPI_SPI_ID_IDX0,
.taskMode = DRV_SPI_TASK_MODE_IDX0,
.spiMode = DRV_SPI_SPI_MODE_IDX0,
.allowIdleRun = DRV_SPI_ALLOW_IDLE_RUN_IDX0,
.spiProtocolType = DRV_SPI_SPI_PROTOCOL_TYPE_IDX0,
.commWidth = DRV_SPI_COMM_WIDTH_IDX0,
.spiClk = DRV_SPI_SPI_CLOCK_IDX0,
.baudRate = DRV_SPI_BAUD_RATE_IDX0,
.bufferType = DRV_SPI_BUFFER_TYPE_IDX0,
.clockMode = DRV_SPI_CLOCK_MODE_IDX0,
.inputSamplePhase = DRV_SPI_INPUT_PHASE_IDX0,
.txInterruptSource = DRV_SPI_TX_INT_SOURCE_IDX0,
.rxInterruptSource = DRV_SPI_RX_INT_SOURCE_IDX0,
.errInterruptSource = DRV_SPI_ERROR_INT_SOURCE_IDX0,
.queueSize = DRV_SPI_QUEUE_SIZE_IDX0,
.jobQueueReserveSize = DRV_SPI_RESERVED_JOB_IDX0,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="SYS_TMR Configuration">
/*** TMR Service Initialization Data ***/
const SYS_TMR_INIT sysTmrInitData =
{
.moduleInit = {SYS_MODULE_POWER_RUN_FULL},
.drvIndex = DRV_TMR_INDEX_0,
.tmrFreq = 1000,
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="DRV_SDCARD Configuration">
/*** SDCARD Driver Initialization Data ***/
const DRV_SDCARD_INIT drvSDCardInit =
{
.spiId = SPI_ID_6,
.spiIndex = 0,
.sdcardSpeedHz = 20000000,
.spiClk = CLK_BUS_PERIPHERAL_1,
.sdCardPinActiveLogic = SDCARD_DETECTION_LOGIC_ACTIVE_LOW,
.cardDetectPort = PORT_CHANNEL_F,
.cardDetectBitPosition = PORTS_BIT_POS_12,
.writeProtectPort = PORT_CHANNEL_B,
.writeProtectBitPosition = PORTS_BIT_POS_9,
.chipSelectPort = PORT_CHANNEL_B,
.chipSelectBitPosition = PORTS_BIT_POS_13,
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="SYS_DEVCON Configuration">
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// </editor-fold>
//<editor-fold defaultstate="collapsed" desc="SYS_FS Configuration">
/*** File System Initialization Data ***/
const SYS_FS_REGISTRATION_TABLE sysFSInit [ SYS_FS_MAX_FILE_SYSTEM_TYPE ] =
{
{
.nativeFileSystemType = FAT,
.nativeFileSystemFunctions = &FatFsFunctions
}
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize( NULL );
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_CLK_SystemFrequencyGet());
SYS_PORTS_Initialize();
/* Initialize Drivers */
sysObj.drvTmr0 = DRV_TMR_Initialize(DRV_TMR_INDEX_0, (SYS_MODULE_INIT *)&drvTmr0InitData);
SYS_INT_VectorPrioritySet(INT_VECTOR_T9, INT_PRIORITY_LEVEL1);
SYS_INT_VectorSubprioritySet(INT_VECTOR_T9, INT_SUBPRIORITY_LEVEL0);
/*** SPI Driver Index 0 initialization***/
SYS_INT_VectorPrioritySet(DRV_SPI_TX_INT_VECTOR_IDX0, DRV_SPI_TX_INT_PRIORITY_IDX0);
SYS_INT_VectorSubprioritySet(DRV_SPI_TX_INT_VECTOR_IDX0, DRV_SPI_TX_INT_SUB_PRIORITY_IDX0);
SYS_INT_VectorPrioritySet(DRV_SPI_RX_INT_VECTOR_IDX0, DRV_SPI_RX_INT_PRIORITY_IDX0);
SYS_INT_VectorSubprioritySet(DRV_SPI_RX_INT_VECTOR_IDX0, DRV_SPI_RX_INT_SUB_PRIORITY_IDX0);
SYS_INT_VectorPrioritySet(DRV_DRV_SPI_ERROR_INT_VECTOR_IDX0, DRV_SPI_ERROR_INT_PRIORITY_IDX0);
SYS_INT_VectorSubprioritySet(DRV_DRV_SPI_ERROR_INT_VECTOR_IDX0, DRV_SPI_ERROR_INT_SUB_PRIORITY_IDX0);
sysObj.spiObjectIdx0 = DRV_SPI_Initialize(0, (const SYS_MODULE_INIT * const)&drvSpi0InitData);
sysObj.drvSDCard = DRV_SDCARD_Initialize(DRV_SDCARD_INDEX_0,(SYS_MODULE_INIT *)&drvSDCardInit);
/* Initialize System Services */
SYS_INT_Initialize();
/*** TMR Service Initialization Code ***/
sysObj.sysTmr = SYS_TMR_Initialize(SYS_TMR_INDEX_0, (const SYS_MODULE_INIT * const)&sysTmrInitData);
SYS_FS_Initialize( (const void *) sysFSInit );
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��Asys_ports_static.c
//---------------------------------------------------------------------------------------
/*******************************************************************************
SYS PORTS Static Functions for PORTS System Service
Company:
Microchip Technology Inc.
File Name:
sys_ports_static.c
Summary:
SYS PORTS static function implementations for the Ports System Service.
Description:
The Ports System Service provides a simple interface to manage the ports
on Microchip microcontrollers. This file defines the static implementation for the
Ports System Service.
Remarks:
Static functions incorporate all system ports configuration settings as
determined by the user via the Microchip Harmony Configurator GUI. It provides
static version of the routines, eliminating the need for an object ID or
object handle.
*******************************************************************************/
//DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
//DOM-IGNORE-END
#include "system_config.h"
#include "peripheral/ports/plib_ports.h"
#include "peripheral/int/plib_int.h"
void SYS_PORTS_Initialize(void)
{
//SD�J�[�h�W
//CS
TRISBbits.TRISB13 = 0; //RB13 CS: out
ANSELBbits.ANSB13 = 0; //RB13 �f�W�^�����[�h
// TRISAbits.TRISA1 = 0; //RA1 CS: out
// ANSELAbits.ANSA1 = 0; //RA1 �f�W�^�����[�h
//CD
TRISFbits.TRISF12 = 1; //RF12 CD: in
ANSELFbits.ANSF12 = 0; //RF12 �f�W�^�����[�h
CNPUFbits.CNPUF12 = 1; //RF12 �v������ //CD
//TRISBbits.TRISB8 = 1; //RB8 CD: in
//ANSELBbits.ANSB8 = 0; //RB8 �f�W�^�����[�h
//CNPUBbits.CNPUB8 = 1; //RB8 �v������ //CD
//WP
TRISBbits.TRISB9 = 1; //RB9 WP: in
ANSELBbits.ANSB9 = 0; //RB9 �f�W�^�����[�h
CNPUCbits.CNPUC2 = 1; //RB9 �v������ //
//SPI6���}�b�s���O
//SDI // PPS Input Remapping
TRISFbits.TRISF13 = 1; //in
ANSELFbits.ANSF13 = 0; //�K�{ //�f�W�^�����[�h
PLIB_PORTS_RemapInput(PORTS_ID_0, INPUT_FUNC_SDI6, INPUT_PIN_RPF13 ); //SDI6 //RF13
// SDI6Rbits.SDI6R = 0b1001; //RPF13�s���� SDI6�i���́j������t��
//SDO // PPS Output Remapping
TRISBbits.TRISB15 = 0;
ANSELBbits.ANSB15 = 0; //�K�{ //�f�W�^�����[�h
PLIB_PORTS_RemapOutput(PORTS_ID_0, OUTPUT_FUNC_SDO6, OUTPUT_PIN_RPB15 ); //SDO6 //RB15
// TRISFbits.TRISF12 = 0;
// ANSELFbits.ANSF12 = 0; //�K�{ //�f�W�^�����[�h
// PLIB_PORTS_RemapOutput(PORTS_ID_0, OUTPUT_FUNC_SDO6, OUTPUT_PIN_RPF12 ); //SDO6 //RF12
// RPF12Rbits.RPF12R = 0b1010; //RPF12�s���Ɂ@SDO6�̏o�͂�����t��
}
/*******************************************************************************
End of File
*/
//�ȉ��A1lcd_lib_C32.h
//-------------------------------------------------------------------------------------
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//XC32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
#define lcd_Clock 200000000 // �P�ʂ�Hz�Ŏw��
//LCD�|�[�g�o�̓��[�h�ݒ�
#define lcd_port_DB7_Config() TRISAbits.TRISA1 = 0
#define lcd_port_DB6_Config() TRISBbits.TRISB11 = 0
#define lcd_port_DB5_Config() TRISAbits.TRISA10 = 0
#define lcd_port_DB4_Config() TRISAbits.TRISA9 = 0
#define lcd_rs_Config() TRISBbits.TRISB6 = 0
#define lcd_stb_Config() TRISBbits.TRISB7 = 0
//LCD�|�[�g�f�W�^���|�[�g�ݒ�
#define lcd_port_DB7_Digital() ANSELAbits.ANSA1 = 0
#define lcd_port_DB6_Digital() ANSELBbits.ANSB11 = 0
#define lcd_port_DB5_Digital() ANSELAbits.ANSA10 = 0
#define lcd_port_DB4_Digital() ANSELAbits.ANSA9 = 0
#define lcd_rs_Digital() ANSELBbits.ANSB6 = 0
#define lcd_stb_Digiata() ANSELBbits.ANSB7 = 0
// LCD�|�[�g�o��
#define lcd_port_DB7 LATAbits.LATA1 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB11 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATAbits.LATA10 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATAbits.LATA9 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB6 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB7 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//�ȉ��A1lcd_lib_C32.c
//----------------------------------------------------------------------------------------------
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//XC32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(lcd_Clock/20000000)*usec;
do //�����F�@at�@200MH (Clock=200000000)
{ //delay_us(1000)��1000.4��sec�A�@delay_us(100)��100.6��sec�Adelay_us(10)��10.5��sec�Adelay_us(1)��1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(3); //3��sec�E�F�C�g
// lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(3); //3��sec�E�F�C�g
// lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
//LCD�|�[�g�o�̓��[�h�ݒ�
lcd_port_DB7_Config();
lcd_port_DB6_Config();
lcd_port_DB5_Config();
lcd_port_DB4_Config();
lcd_rs_Config();
lcd_stb_Config();
//LCD�|�[�g�f�W�^���|�[�g�ݒ�
lcd_port_DB7_Digital();
lcd_port_DB6_Digital();
lcd_port_DB5_Digital();
lcd_port_DB4_Digital();
lcd_rs_Digital();
lcd_stb_Digiata();
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@�����쌋�ʁ�
1.�@�s�N�`���[
| |
�X�e�b�v |
�t���\�� |
|
| �@ |
SD�J�[�h�X���b�g�Ɂ@SD�J�[�h�}�����m�F |
 |
|
| �A |
�t�@�C���I�[�v������ |
 |
|
| �B |
�������ݐ��� |
 |
|
| �C |
�ǂݏo�����e�\��
�@�t���P�s�ځF�@�t�@�C����
�@�t��2�s�ځF�@�ǂݏo�����e |
 |
|
2. �@����iYouTube�j
���@AD�R���o�[�^�l�ǂݏ����@�@�@�@�@�@�@�@�@�@��dsPIC �@C30�ҁ�
�@�@AD�R���o�[�^���͒l��ǂݍ���ł�SD�J�[�h�֏����݁A�����Ă���SD�J�[�h����AD�R���o�[�^�l��ǂݏo����
�@�@DA�R���o�[�^�ɓ������Ԏ��ōČ��������Љ�܂��B
������i�d�l��
�@�@�O�����U�킩��̎O�p�g�i���g���F�PHz�@Vp-p�F0�|4V�j��AD�ϊ����ă��A���^�C����SD�J�[�h�ɏ�������
�@�A1000�̃f�[�^��SD�J�[�h�ɏ������珑�����݂��I�����āASD�J�[�h���珑�����f�[�^��ǂݏo���ă��A��
�@�@�^�C����DA�R���o�[�^MCP4822�ɏo�͂���B
�@�B�������y�ѓǂݏo���̃T���v�����O���g����100Hz�Ƃ���B�@�@
������i�̉�H�}���@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
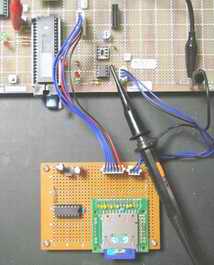
�@���v���O�����၄�@�@�@
///************************************************************/
// AD�R���o�[�^�l��SD�J�[�h�ɏ�������
//�@�@�@���̌�@SD�J�[�h�Ǎ��@�@�@�@�@�@ �@����PIC30F4013
//************************************************************/
// MPLAB�@�v���W�F�N�g�ւ̒lj��t�@�C��
// Source Files�t�H���_ FSIO.c
// SD-SPI.c
// 1lcd_lib_C30.c
// SD R_W AD�@4013.c
// Header Files�t�H���_ FScohfig.h
// FSDefs.h
// FSIO.h
// GenericTypeDefs.h
// SD-SPI.h
// 1lcd_lib_C30.h
// Linker Script�t�H���_�@ p30f4013.gld
// Library Files�t�H���_�@ lib30F4013-coff.a
#include "p30f4013.h"
#include "1lcd_lib_C30.h"
#include "adc12.h"
#include "stdio.h"
#include <timer.h>
#include "FSIO.h"
_FOSC(CSW_FSCM_OFF & XT_PLL8); // (10MHz)x8=80MHz
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & BORV_42 & PWRT_64 & MCLR_EN);
_FGS(CODE_PROT_OFF);
unsigned int Config1 = //ADCON1���W�X�^�̐ݒ�
ADC_MODULE_ON & //ADON bit15=1 �F AD�R���o�[�^���W���[���@���@ON //AD Module On/Off
ADC_IDLE_CONTINUE & //ADSIL bit13=0 �F �A�C�h�����̓���@���@����p�� //Idle Mode Operation
ADC_FORMAT_INTG & //FORM bit9-8=00 :�o�̓f�[�^�̃t�H�[�}�b�g�@���@���� //Result Output Format
ADC_CLK_AUTO & //SSRC bit5-7=111 :�ϊ��J�n�g���K�ݒ� //Conversion Trigger Source
// ��ADCON3��SAMC�ɂ��N���b�N�i�T���v���z�[���h�j���I����ϊ������J�n
ADC_AUTO_SAMPLING_OFF & //ASAM bit2=1�@: AD�T���v�����O�����J�n���蓮�J�n�@//Auto Sampling Select
ADC_SAMP_OFF; //SAMP bit1=0�@: �T���v�����O�蓮���䁨OFF //Sample Enable
//�@�@�i��jASAM = 0(ADC_AUTO_SAMPLING_OFF) �̎��@SAMP=1(ADC_SAMP_ON)�ŕϊ��J�n
//DONE�@bit0 : AD�ϊ��I���t���O�iAD�ϊ����I������ƂP�����A�@�������ݕs�j
unsigned int Config2 = //ADCON2���W�X�^�̐ݒ�
ADC_VREF_AVDD_AVSS & //VCFG bit13-15=000: S/H�A���v�̃��t�@�����X�ݒ�: ��d��Vdd�A�V���O���G���h�@//Voltage Reference
ADC_SCAN_OFF & //CSCNA bit10=0 �F MUX���ݎ����X�L�������䁨�I�t //Scan Section
ADC_SAMPLES_PER_INT_1 & //SMPI bit2-5 : �����ݕp�x���P�� //Number of Samples between Interrupts
ADC_ALT_BUF_OFF & //BUFM bit1=0: ���݃o�b�t�@�[���䁨�Ȃ� //Buffer mode Select
ADC_ALT_INPUT_OFF; //ALTS bit0=0: AD���͂̕����o�b�t�@�[�ւ̊i�[//Alternate Input sample Mode Select(
unsigned int Config3 = //ADCON3���W�X�^�̐ݒ�
ADC_SAMPLE_TIME_8 & //SAMC bit8-12�@:�T���v���z�[���h���� ���@�W�T�C�N��(TAD)//Auto Sample Time bits
ADC_CONV_CLK_SYSTEM & //ADRC bit7=0�@:AD�ϊ��N���b�N���V�X�e���N���b�N�@//Conversion Clock Source Select
ADC_CONV_CLK_32Tcy; //ADCS bit0-5�@:�ϊ��N���b�N����32Tcy�i�ݒ��MAX��I���j�@//Conversion Clock Select
unsigned int ConfigPort = //ADPCFG���W�X�^�̐ݒ� ANLOG/DIGITAl Pin Select
//ex1. ENABLE_ALL_ANA ex2. ENABLE_ALL_DIG ex3. ENABLE_AN0_ANA & ENABLE_AN1_ANA
ENABLE_AN1_ANA; //AN1 ���@�A�i���O�|�[�g
unsigned int ConfigScan = //ADCSSL���W�X�^�̐ݒ�@ Scan Channel Select
SCAN_NONE; //ADCSLL = 0x0000 : �����X�L�������X�L��������
unsigned int Channel1 = //ADCHS���W�X�^�̐ݒ�
ADC_CH0_POS_SAMPLEA_AN1 & //�}���`�v���N�TA�iS/H�A���v�j��Vref+�ւ̐ڑ��`�����l���@���@�`�����l��1
ADC_CH0_NEG_SAMPLEA_NVREF; //�}���`�v���N�TA�iS/H�A���v�j��Vref-�ւ̐ڑ��`�����l���@���@Vss
unsigned int Count;
unsigned int AdcValue;
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
int Chanel = 0; //MCP4822 ChanelA �I��
FSFILE* pfile;
int N_Write; //�������݉߂�l
unsigned int N_Read; //�ǂݏo���߂�l
int Mode_SD = 0; //0:SD�J�[�h�������݃��[�h�@�@0�FSD�J�[�h�Ǎ����[�h
void delay_ms(unsigned int);
void AdcFunc(void);
//-------------------------------------------
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void DAout(unsigned int Out) //DA�R���o�[�^�@MCP4822�ւ̏o�͊�
{
int i =0;
LATDbits.LATD9 = 0; // clock low // RD9 : Clock(SCK)
LATDbits.LATD8 = 0; // cs low (select) // RD8 : Chip Select(CS)
LATDbits.LATD3 = Chanel; // VoutA�ɏo�� 0:Chanel A 1:Chanel B
// RD3 : Data(SDI)
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 1; //dumy
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 0; //�Q�C���ݒ�r�b�g�@1�F G = 1 �@ �@�@�O�F G = 2
// G = 2; V = Data/4096 * 2.048*2 [V]
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
LATDbits.LATD3 = 1; //�V���b�g�_�E���ݒ�r�b�g 1�F�@�o�̓C�l�C�u���@�@�@�@�O�F�@�V���b�g�_�E��
// output enable
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
for(i=0; i<12; i++) //�@���M�f�[�^��MSB���珇���P�r�b�g�Âo�͂���
{
if((Out & 0b0000100000000000) == 0)LATDbits.LATD3 = 0;
else LATDbits.LATD3 = 1;
Out = (Out << 1);
LATDbits.LATD9 = 1; // clock high
LATDbits.LATD9 = 0; // clock low
}
LATDbits.LATD8 = 1; // cs high (MCP4822 Disable)
}
void SD_Func(void) // AD�ϊ��ǂݎ��@���@�t���\��
{
float Volt;
unsigned int I;
unsigned int F;
unsigned int Buf_Input[1]; //AD�Ǎ��݂̃z�[���h�l��SD�J�[�h�������ݒl
unsigned int Buf_Output[1];
if(Mode_SD == 0) //SD�J�[�h�֏�������
{
SetChanADC12(Channel1); //Vref-(RB1�AAN1) ���@GND
ADCON1bits.SAMP =1; //�T���v�����O�J�n
//�T���v���z�[���h���ԁF8TAD�@�iADCON�R��SAMC<3:0>)
//�ϊ��̎����J�n
//�ϊ����ԁF31TAD�@�iADCON3��ADCS<5:0>)
while(!ADCON1bits.DONE); //AD�ϊ��I���t���O���P�ɂȂ�܂ł܂�
Buf_Input[0] = ADCBUF0; //AD�ϊ��l�Ǎ��݁i�Ǎ��݂������j //�o�b�t�@�[0�̓ǂݏo��
N_Write = FSfwrite((const void*)Buf_Input,sizeof(unsigned int),1,pfile);//�t�@�C���Ƀf�[�^��������
if(N_Write == 1) //����ȏꍇ�F�������݉��Ԃ��Ă���
{
Count++;
}
else //�ُ�ȏꍇ
{
lcd_clear();
sprintf(Buf,"Write No%d NG !!",Count); //�t����"Write NG !" ��\��
lcd_str(Buf);
return 0;
}
}
else
{
PORTFbits.RF5 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
N_Read = FSfread(Buf_Output,sizeof(unsigned int),1,pfile);//�t�@�C������f�[�^�Ǎ���
PORTFbits.RF5 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
if(N_Read != 0)
{
DAout(Buf_Output[0]); // SD����̏o�͂�MCP4822�ɏo��
}
}
}
void _ISR _T1Interrupt(void) //100Hz�̊����ݔ���
{
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
SD_Func(); // AD�ϊ��ǂݎ��@���@�t���\��
}
/// ���C����
int main(void) {
TRISB = 0b0000000000000010; // AD���͂�bit1(AN1 RB1)�̂ݓ���
TRISF = 0;
TRISD = 0; //�|�[�gD���o�̓��[�h�ɐݒ�
TRISF = 0;
OpenADC12(
Config1, //ADCON1���W�X�^�̐ݒ�
Config2, //ADCON2���W�X�^�̐ݒ�
Config3, //ADCON3���W�X�^�̐ݒ�
ConfigPort, //ADPCFG���W�X�^�̐ݒ�
ConfigScan //ADCSSL���W�X�^�̐ݒ�
);
///�T���v�����O���g���@100Hz�i10Hz)
/// bit15:�^�C�}On����r�b�g�@bit14:�������@�r�b�g13
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����off
T1_PS_1_256 & //�v���X�P�[���@1/256
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
80000000/4/100/256 - 1 //�T���v�����O���g��100Hz
// �@�@�@80000000/4/10/256 - 1 //�T���v�����O���g��10Hz
);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"SD Ver6 !!%u",Count);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(2000);
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
PORTFbits.RF5 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
LATDbits.LATD2 = 1;
while(!FSInit()); //SD�J�[�h�C�j�V�����C�Y�@SD�J�[�h�̎����ƃt�H�[�}�b�g�ς��`�F�b�N
pfile = FSfopen("DATA.DAT","w"); //�t�@�C���������݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
PORTFbits.RF5 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
Mode_SD = 0; //SD�������݃��[�h
Count = 0;
ConfigIntTimer1(T1_INT_PRIOR_7 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
do
{
}while(Count < 1000); // 50�̕����Ȃ������i�Q�o�C�g�j�f�[�^��SD�J�[�h�ɏ������ނ܂ŌJ��Ԃ�
PORTFbits.RF5 = 1; //CS=1 SD�J�[�h�̃`�b�v�Z���N�gdisable
DisableIntT1;
FSfclose(pfile); // �t�@�C�������
PORTFbits.RF5 = 0; //CS=0 SD�J�[�h�̃`�b�v�Z���N�genable
pfile = FSfopen("DATA.DAT","r"); //�t�@�C���Ǎ��݃��[�h�ŃI�[�v���@
Mode_SD = 1; //SD�J�[�h�Ǎ����[�h
N_Read = 1; //0����while(N_Read !=0)�������݂�����O�ɐ^�ƂȂ胋�[�v���Ă��܂�
EnableIntT1; //�^�C�}�P��������
do
{
}while(N_Read !=0); //N_ReaD��0���߂��Ă���iEOF�j�܂ő҂�
FSfclose(pfile); // �t�@�C�������
DisableIntT1;
while(1);
CloseADC12(); //AD�ϊ��I������
CloseTimer1();
return 0;
}
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
*************************************************************************************************�@�@�@
*************************************************************************************************�@�@�@
***�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ***
*** ���̑��̃C���N���[�h�t�@�C���� ***
*** �uC����ł͂��߂�PIC24F���p�K�C�h�u�b�N�v�i��ՓN�� ���@�Z�p�]�_�Ёj ***
*** �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �̕t��CD�Ɏ��[����Ă��܂��B ***
*************************************************************************************************�@�@�@
*************************************************************************************************�@�@�@
//************************************************************************************************
//************************************************************************************************
//�ȉ��́@�C���N���[�h�t�@�C���@SD-SPI.h�̒��ŕύX���ʂ݂̂��������̂ł��B�@�s���A�T�C���W��
�@�ύX�ł��B
//�@
�@�c
�@�c
/********************************************************************/
/* Pin and register definitions */
/********************************************************************/
#define SD_CS PORTFbits.RF5
#define SD_CS_TRIS TRISFbits.TRISF5
#define SD_CD PORTDbits.RD0
#define SD_CD_TRIS TRISDbits.TRISD0
#define SD_WE PORTDbits.RD1
#define SD_WE_TRIS TRISDbits.TRISD1
// Registers for the SPI module you want to use
#define SPICON1 SPI1CON
#define SPISTAT SPI1STAT
#define SPIBUF SPI1BUF
#define SPISTAT_RBF SPI1STATbits.SPIRBF
#define SPICON1bits SPI1CONbits
#define SPISTATbits SPI1STATbits
// Tris pins for SCK/SDI/SDO lines
#define SPICLOCK TRISFbits.TRISF6
#define SPIIN TRISFbits.TRISF2
#define SPIOUT TRISFbits.TRISF3
�@�c
�@�c
//************************************************************************************************
//************************************************************************************************
//�@�ȉ��́@�C���N���[�h�t�@�C�� SD-SPI.c�̒��ŏC�����������݂̂��������̂ł��B
// SD�J�[�h�̃\�P�b�g�ɂ�菑�����݃v���e�N�g�̘_�����قȂ���̂�����悤�ł��B
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i��Ղ���ɂ������Ă��������܂����j
// �킽�����g�p����SD�J�[�h�\�P�b�g�̓T���n���g����CK29�ł��BCK29�̃��C�g�v���e�N�gWE�̘_����
// �h���C�g�v���e�N�g���������݉\�Ȉʒu�ɂ���SD�J�[�h�����܂ő}������� ON �h�ł��B���Ȃ킿
//�@�ȉ��̏ꍇ SD�J�[�h��WE��OFF�ł��B
//�@�@�@�@�ESD�J�[�h���}������Ă��Ȃ��ꍇ
//�@�@�@�@�E���C�g�v���e�N�g���������ݕs�̈ʒu�ɂ���SD�J�[�h�����܂ő}������Ă���ꍇ
//
//�@�ȉ��͏C���O�̃\�[�X�R�[�h�ł��BSD�J�[�h�̌��o�`�F�b�N�̕����ł��B�C���������̂́@SD_WE��
//�@�O�́h�I�h���폜����Ă��܂��B
//�@
// BYTE
// WriteProtectState(void)
// {
//�@ �@return(!SD_WE); // �C����́h!�h���폜����Ă��܂��B
// }
//
//
//
// �ȉ��͏C����̃\�[�X�R�[�h�ł��B
BYTE
WriteProtectState(void)
{
�@�@ return(SD_WE); // �h�I�h���폜����Ă��܂��B
}
//*********************************************************************************************************
//*************************************************************************************************:********
�@//�@�ȉ���FSconfig.h�t�@�C���̒��ŕύX���������݂̂��L�ڂ��Ă��܂��B�V�X�e���N���b�N��20MH������80MH���ɕύX
�@//�������Ƃɔ����ύX�ł�
// Define the system clock speed
//#define SYSTEM_CLOCK (DWORD)20000000
#define SYSTEM_CLOCK (DWORD)80000000
�����쌋�ʁ�
�O�����U�킩��̎O�p�g�i�PHz�@Vp-p�F0-�SV)��SD�J�[�h�ɓǂݍ���A�Đ�����DA�R���o�[�^�ɏo�͂����g�`�ł��B
�T���v�����O���g����100Hz�̏ꍇ��10Hz�̏ꍇ�������܂��B
�@���A�T���v���v���O�����̓T���v�����O���g����100Hz�̏ꍇ�̂��̂ł��B
AD�R���o�[�^���͓d��
�i����PIC30F4013��RB1�s���j |
|
DA�R���o�[�^�o�͓d��
�iMCP4822��8�s���j |
|
�T���v�����O���g���F100Hz |
|
�T���v�����O���g���F10Hz |
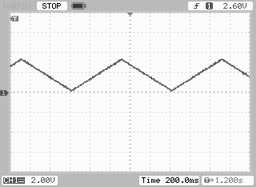 |
|
|
|
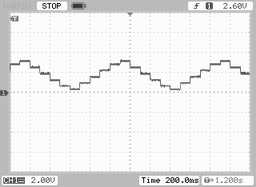 |
�@�i�O�����U��F�@�t�@���N�V�����W�F�l���[�^�iINSTEC�@SFG-2104�j�@�@�@�@�@�g�`�ϑ��F�f�W�^���I�V���@��ʁ@DS-5102�j
���@WAV�^���t��MP3�v���[���[
�i1) PIC24FJ64GA002 ��
�@PIC�Q�SFJ�U�SGA002���g�p�����AWAV�t�@�C���`���^���@�\�t��MP�R�v���[���[���Љ�܂��BMP3�̃f�R�[�_�[IC�Ƃ��Ă�VS1011E��
�g�p���Ă��܂��B�@VS1011E�̃��C�u�������iVS1011.h�AVS1011.c�j����ՓN�����v���ꂽ���̂ł��B��Ղ���ɂ͖{�v���[���[�����
������M�d�ȃA�h�o�C�X�𑽁X���������܂����B
�@
�@���@mp3�f�R�[�_�[IC VS1011E�́@QFP���L�o���Ƀn���_�t������A�[�q��2.54�C���`�̃s���w�b�_�[�R�l�N�^�ɕϊ����ꂽ���́i700�~/�j��
�@�@�@�H���d�q���̔�����Ă��܂��B���͂���������Ď���i�삵�܂����B
������i�̎d�l��
�E�Đ����[�h�Ƙ^�����[�h��L���邱�ƁB�Đ��A�^���̃��[�h�ؑւ̓������^���[�X�C�b�`�ł����Ȃ�����
�Emp3�t�@�C���ɂ��Ă͍Đ��݂̂Ƃ��A�G���R�[�h�@�\�͂��Ȃ�
�Emp3�Awav�`����SD�J�[�h�Ɏ��^����Ă��鉹�y�E�����f�[�^���Đ��ł��邱��
�Emp3�t�@�C���̃f�R�[�_IC�Ƃ��āAVS1011E���g�p���邱��
�E�Đ���SD�J�[�h���ɂ��鉹�y�E�����f�[�^�����Ԃɂ����Ȃ��B�A���A�X�L�b�v�{�^�����������Đ��f�[�^���X�L�b�v�ł���悤�ɂ��邱��
�E�^���́A�}�C�N���x���̉����M������PIC��AD�ϊ����āA�f�[�^��SD�J�[�h��WAV�`���̃t�@�C���Ƃ��ăt�@�C�����邱��
�E�^������WAV�t�@�C���̏����͉��L�Ƃ���
�@�@���k�̃t�H�[�}�b�gID�@�c�c�@���j�APCM
�@�A�`�����l�����@�c�c�@���m����
�@�B�T���v�����O���[�g�c�c22050�@Hz
�@�C�f�[�^�]�����x�@�c�c44100�@�o�C�g/sec
�@�DBlock�@align�@�c�c�@2�@�o�C�g/�T���v��
�@�E�ʎq���r�b�g���c�c16�r�b�g
�E�^������t�@�C������VOICE.wav�Ƃ���BSD�J�[�h���̃��[�g�ɂ��̃t�@�C�����̃t�@�C�������݂��Ȃ��ꍇ�̓t�@�C�������邱�ƁB�@�܂��A�@
�@���ł�VOICE.wav�����݂���ꍇ�͏㏑��������̂Ƃ���B
�E�L�����N�^�t���ɂ��A�^��/�Đ����̃t�@�C������\������B
������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
/*
wav�t�@�C���^���t��MP3�v���[��
�@�@�@PIC24FJ64GA002�{VS1011e,SD�J�[�h
Ver.2 //�o�O�C��
//�WAV�t�@�C���������艻
//��X�L�b�v����ɂ�����I���t�@�C�������ʐ��@ �@��
*/
#include <p24FJ64GA002.h>
#include "GenericTypeDefs.h"
#include "FSIO.h"
#include "VS1011.h"
#include <uart.h>
#include <timer.h>
#define STX 0x02 //�r�s�w
#define ETX 0x03 //ETX
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1
(
JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF //�E�H�b�`�h�b�N�^�C�}�F�@OFF
)
_CONFIG2
(
IESO_OFF & // �Q���x�X�^�[�g�A�b�v�@�\�FOFF
FNOSC_FRCPLL & //��������RC���U�i8MHZ)��H�@�{�@4�{PLL�@���@32MH���i=�@8MHz�@�~�@4�j
FCKSM_CSDCMD & //�N���b�N�ؑւ�����FOFF�@�N���b�N���j�^�FOFF
OSCIOFNC_OFF & //OSCO/RC15 function�F�@OSCO or Fosc/2
IOL1WAY_OFF & //RP Register Protection�F�@Unlimited Writes To RP Registers
I2C1SEL_PRI & //I2C1 pins Select�F�@Use Primary I2C1 pins
POSCMOD_NONE //���U��H���[�h�@Oscillator Selection:�@ Primary disabled
)
struct myWaveHeader //�S�w�b�_�T�C�Y�F�@44�o�C�g
{
char id_RIFF[4]; //Chunk ID RIFF�w�b�_�@//�@4�o�C�g
unsigned long int size_file; //�t�@�C���T�C�Y�i���t�@�C���T�C�Y - 8�j�o�C�g�@//4�o�C�g
char id_WAVE[4]; //Chunk ID WAVE //4�o�C�g
char id_fmt[4]; //Chunk ID fmt //4�o�C�g
unsigned long int size_fmt; //�t�H�[�}�b�g�֘A��`�f�[�^�̃T�C�Y //4�o�C�g
unsigned int code_wavefmt; //WAVE�t�@�C���̈��k�t�H�[�}�b�g�R�[�h�@�A���A���j�APCM�͈��k�Ȃ�//2�o�C�g
unsigned int channel; //�`�����l�����@//2�o�C�g
unsigned long int rate_sample; //�T���v�����O���[�g //4�o�C�g
unsigned long int rate_tranfer; //�]�����x[byte/sec]�@//4�o�C�g
unsigned int align_block; //�T���v��������̃o�C�g��[byte/�T���v��] //2�o�C�g
unsigned int bit_sample; //�ʎq���r�b�g��[bit] //2�o�C�g
char id_data[4]; //Chunk ID data //4�o�C�g
unsigned long int size_data; //�T���v�����O�f�[�^�̃T�C�Y[byte]�@//4�o�C�g
}
;
struct myWaveHeader mywaveheader = //�@WAVE�t�@�C���w�b�_�\���̂̏������@�@�@//44�o�C�g
{
"RIFF", //Chunk ID RIFF �@//�@4�o�C�g
0x0006C28C, //�i���j�t�@�C���T�C�Y�F 443020�o�C�g�@//���ɒl�ɈӖ��Ȃ�
"WAVE", //Chunk ID WAVE //4�o�C�g
"fmt ", //char id_fmt[4]; //Chunk ID fmt //4�o�C�g
16, //16�o�C�g�@at ���j�APCM �t�H�[�}�b�g�֘A��`�f�[�^�̃T�C�Y //4�o�C�g
0x0001, //WAVE�t�@�C���̈��k�t�H�[�}�b�g�R�[�h�F ���j�APCM //2�o�C�g
1, //�`�����l�����F�@���m�����@ //2�o�C�g
22050, //�T���v�����O���[�g�F�@22.05[Hz] //4�o�C�g
44100, //�]�����x�F�@44100[byte/sec]�@//4�o�C�g //�T���v�����O���[�g�F�@22.05[Hz]
2, //�T���v��������̃o�C�g���F�@2[byte]/�T���v�� //2�o�C�g
16, //�ʎq���r�b�g���F�@16[bit] //2�o�C�g
"data", //Chunk ID data //4�o�C�g
0x0006C267 ////�i���j�T���v�����O�f�[�^�̃T�C�Y�F�@442983�o�C�g�@//���ɒl�ɈӖ��Ȃ�
};
struct myWaveHeader* ptrWH; //�\���̂̃|�C���^
Clock = 320000000; //
FSFILE *fptr,*fptr2; //FAT�t�@�C���p�\���̂̃|�C���^�ϐ�
size_t result;
BYTE Buffer[256];
SearchRec Record;
SearchRec *rptr = &Record;
BYTE Volume, ChgFlag, BASS; // MP3�p�ϐ�
int Mode = 0; //�^��/�����[�h�@�O�F���@�P�F�^��
unsigned long int adr_SD;
unsigned long int count_block = 0; //SD���M�u���b�N�i512�o�C�g�j��
unsigned int size_dataBlock = 512;
int count_buf1 = 0; //�o�b�t�@�P�f�[�^��
int count_buf2 = 0; //�o�b�t�@�Q�f�[�^��
int flag_buf1 = 0; //�����f�[�^�o�b�t�@�P�̏�ԁ@
int flag_buf2 = 0; //�����f�[�^�o�b�t�@�Q�̏��
//�@0�F�����f�[�^��M�\��ԁ@1�FSD�։����f�[�^���M�\���
int mode_tranceive = 0; //����M���[�h�@
//0�F�@�o�b�t�@�P=�����^��M�A�o�b�t�@�Q=SD���M
//�P�F�@�o�b�t�@�P=SD���M���[�h�A�o�b�t�@�Q=������M
int data1_sound[512]; //�����f�[�^�o�b�t�@�P
int data2_sound[512]; //�����f�[�^�o�b�t�@�Q
int ix = 0,iy = 0;
char* str_filename;
int Stop_SDwriting = 0;//�@1�F�@SD�J�[�h�ւ̏����ݒ�~�@0�F�@��������
int Next = 0;
void my_delay_ms(unsigned int N) //�Pmsec�@�̃f�B���[��
{
__delay32(Clock/2000*N); //�V�X�e���N���b�N���g��2000000Hz��PIC�̂P�T�C�N���f�B���[���ԁ��P��sec
} //�@���@Clock�iHz)/2000�@=�@1000��sec�@=�@1msec�@
void wav_end(void) //�^���t�@�C����������
{
unsigned int result;
int count_N;
mywaveheader.size_data = count_block * 1024 ; //[�o�C�g]
mywaveheader.size_file = count_block * 1024 + sizeof mywaveheader - 8; //[�o�C�g]
count_N = 0;
do{
delay_ms(100);
result = FSfseek(fptr,0,SEEK_SET); //�t�@�C���̐擪�Ƀt�@�C���|�C���^�̈ʒu���ړ�
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("fseek N=%d ",count_N);
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("result=%d ",result); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
count_N++;
}while(result != 0);
delay_ms(1500);
count_N = 0;
do{
delay_ms(100);
result = FSfwrite((const void*)ptrWH,sizeof(struct myWaveHeader),1,fptr); //�t�@�C���Ƀw�b�_�[�������
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("blk=%lu N=%d ",count_block,count_N);
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("result=%d ",result); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
count_N++;
}while(result != 1);
delay_ms(1500);
count_N = 0;
do{
delay_ms(100);
result = FSfclose(fptr); // �t�@�C�������
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("fclose N=%d ",count_N);
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("result=%d ",result); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
count_N++;
}while(result != 0);
delay_ms(1500);
}
void playmode_LCD() //�t���\��
{
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("%s ",str_filename);
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("Play Mode "); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
}
void play() // ���y�f�[�^�̏o��
{
int i;
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_OFF); //�^�C�}�P�����֎~
DisableIntT1;
if(fptr != 0) // ����ɃI�[�v���ł������H
{
do{ // �t�@�C����EOF�܂ʼn����f�[�^�A���o��
SRbits.IPL = 7; // SPI�������͊��荞�֎~
MP3_XDCS_IO = 0; //#define MP3_XDCS_IO�@�@�@�@LATBbits.LATB15=0�@���@DREQ=0
result = FSfread(Buffer, 1, 256, fptr); //SD�J�[�h�̃f�[�^��256�o�C�g�P�ʂœǂݏo��
for(i= 0; i<result; i++) // �ǂݏo�����o�C�g�������J��Ԃ�
{
SendData(Buffer[i]); // ���y�f�[�^���M
}
SRbits.IPL = 2; // ���荞�ݍċ���
if(Mode == 1)return; //�^�����[�h�Ȃ�@�Đ��͏I��
if(Next == 1)result = 0;
} while(result != 0); // �t�@�C����EOF�܂Ōp��
Next = 0;
MP3_XDCS_IO = 1;
// ����������
FSfclose(fptr); // �t�@�C���̃N���[�Y
PlayEnd(); // ���I������
result = FindNext(rptr); // �A���Đ��̂��ߎ��̃t�@�C����
if((result != 0) || (Record.attributes != ATTR_ARCHIVE))
FindFirst("*.*", ATTR_ARCHIVE, rptr); // �t�@�C���̏I���Ȃ�ēx�ŏ�����J��Ԃ�
fptr = FSfopen(Record.filename, "r");
str_filename = Record.filename;
SRbits.IPL = 2; // ���荞�ݍċ���
playmode_LCD();
}
}
void SD_write()
{
if(mode_tranceive == 0) //�o�b�t�@�Q=SD���M�A�o�b�t�@�P=������M���[�h
{
if(flag_buf2 == 1) //�o�b�t�@�Q��SD�֑��M�\��Ԃ̏ꍇ�E�o�b�t�@�P�͉�����M�\���
{
FSfwrite((const void*)data1_sound,sizeof(int),size_dataBlock,fptr);//SD�J�[�h�Ƀf�[�^��������
count_block++;
flag_buf2 = 0; //���@�o�b�t�@�Q���M�����A��M�\���
}
}
else //�o�b�t�@�P=SD�֑��M�A�o�b�t�@�Q=������M���[�h
{
if(flag_buf1 == 1) //�o�b�t�@�P��SD�֑��M�\��Ԃ̏ꍇ�E�o�b�t�@�Q�͉�����M�\���
{
FSfwrite((const void*)data2_sound,sizeof(int),size_dataBlock,fptr);//SD�J�[�h�Ƀf�[�^��������
count_block++;
flag_buf1 = 0; //���@�o�b�t�@�P���M�����A��M�\���
}
}
if(Stop_SDwriting == 1) //
{
delay_ms(200);
wav_end(); //�^��wav�t�@�C���I������
Mode = 0; //���y�����[�h��
delay_ms(1000);
fptr = FSfopen("VOICE.WAV", "r"); // �t�@�C���̃I�[�v��
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("VOICE.WAV ");
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("Play Mode "); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
}
}
void _ISR _T1Interrupt(void) //�^�C�}�P�����݁AAD�R���o�[�^�ǂݍ��݁ASD�J�[�h��������
{
unsigned int temp1;
long int temp2;
IFS0bits.T1IF = 0; //�t���O�N���A
AD1CON1bits.SAMP =1; //�T���v�����O�J�n
while(!AD1CON1bits.DONE); //AD�ϊ��I���t���O�����i�P�ɂȂ�܂Łj�҂�
temp1 = ADC1BUF0; //ADC1��AN1�̃o�b�t�@�[����AD�ϊ����ʂ�Ǎ���
temp2 = temp1*64 - 32768; //32768 = 64*1024 / 2; //��������x���F32768�i = unsigned int / 2)
if(temp2 >= 32767) temp2 = 32767; //�������x���N���b�v
if(temp2 <= -32768)temp2 = -32768;
//���M�D��F�@�����M�f�[�^���o�b�t�@�Ɏc���Ă���ꍇ�͓��͂��鉹���f�[�^�͖�������@
if(mode_tranceive == 0) //�o�b�t�@�P=������M�A�o�b�t�@�Q=SD���M
{
if(flag_buf1 == 0) //�o�b�t�@�P����M�\��ԂȂ�
{
data1_sound[count_buf1] = temp2; //��M�f�[�^���o�b�t�@�\���̂P��data_sound[ ]�ɕۑ�
count_buf1++;
if(count_buf1 >= size_dataBlock)
{
count_buf1 = 0;
flag_buf1 = 1; //���@�o�b�t�@�P�F�@�����f�[�^�t���ESD�]���҂�
mode_tranceive = 1;
}
}
//�o�b�t�@�P�ɂ܂������M�����f�[�^���c���Ă����ꍇ�́A�����f�[�^�͎�M���Ȃ�
}
else //�o�b�t�@�Q=������M�A�o�b�t�@�P=SD���M
{
if(flag_buf2 == 0) //�o�b�t�@�Q����M�\��ԂȂ�
{
data2_sound[count_buf2] = temp2; //��M�f�[�^���o�b�t�@�\���̂Q��data_sound[ ]�ɕۑ�
count_buf2++;
if(count_buf2 >= size_dataBlock)
{
count_buf2 = 0;
flag_buf2 = 1; //���@�o�b�t�@�Q�F�����f�[�^�t���ESD�]���҂�
mode_tranceive = 0;
}
}
}
//�o�b�t�@�Q�ɂ܂������M�����f�[�^���c���Ă����ꍇ�́A�����f�[�^�͎�M���Ȃ�
}
void __attribute__((interrupt, no_auto_psv)) _CNInterrupt(void) //�@�X�C�b�` �ω����肱��
{
if(!PORTAbits.RA4) //�Đ�/�^���{�^�����N���b�N���ꂽ�ꍇ
{
if(Mode == 0) //�Đ����[�h�̏ꍇ
{
Mode = 1; //�^�����[�h��
Stop_SDwriting = 0; //SD�J�[�h�ւ̏���������
MP3_XDCS_IO = 1; //VS1011E�@���f�[�^�M�����C��OFF
MP3_XCS_IO = 1; //VS1011E �`�b�v�Z���N�g����
FSfclose(fptr); // ���݂̃t�@�C���������N���[�Y
PlayEnd(); // ���I������
delay_ms(200);
fptr = FSfopen("VOICE.wav","w"); //�t�@�C���㏑�����݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
ptrWH = &mywaveheader; //�\���̂�mywaveheader�̐擪�A�h���X�ݒ�
FSfseek(fptr,0,SEEK_SET); //�t�@�C���̐擪�Ƀt�@�C���|�C���^�̈ʒu���ړ�
delay_ms(50);
FSfwrite((const void*)ptrWH,sizeof(struct myWaveHeader),1,fptr); //�t�@�C���Ƀw�b�_�[�������
delay_ms(50);
adr_SD = 0x2C; //�t�@�C���̐擪����0x2C(44)�o�C�g�i�����f�[�^�������݊J�n�I�t�Z�b�g�j�̂Ƃ���ɂ�
FSfseek(fptr,adr_SD,SEEK_SET);//�t�@�C���|�C���^�̈ʒu���ړ�
count_block = 0; //SD�J�[�h��512�o�C�g�P�ʂŏ����������Z�b�g
putcUART1('\r'); //�@�����F �t����ʂ��N���A���@�����\���ʒu����s�ڂ̐擪�ֈړ�
printf("VOICE.wav ");
putcUART1('\n'); //�@�����F�@�����\���ʒu���Q�s�ڂ̐擪��
printf("Record Mode "); //�����f�[�^�𑗐M
putcUART1(STX); //�@�t����ʕ\��
delay_ms(300);
//LATBbits.LATB3 = 1; //LED�@����
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x��0�@�^�C�}�P������ON
EnableIntT1; //��������
}
if((Mode == 1) && (count_block >= 10)) //�^�����[�h�@���@10�u���b�N�ȏ㏑������ł���ȂȂ�i�`���^�����O�h�~�j
{
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_OFF); //�^�C�}�P�F�@���荞�ݗD�惌�x���T // IPC0bits.T1IP = 5;
DisableIntT1; //�^�C�}�P�F�@���荞�֎~ //IEC0bits.T1IE = 0;
Stop_SDwriting = 1; //SD�J�[�h�����ݏI��
//1�u���b�N������I�������J�n
//�������ł����I���������s��Ȃ�����!!
}
}
if(!PORTAbits.RA2) //�X�L�b�v�{�^�����N���b�N���ꂽ�ꍇ
{
Next = 1; //�Đ����̃t�@�C���̃Z�N�^�ǂݍ��ݏI����A���̋Ȃ��Đ�
}
IFS1bits.CNIF = 0; // �ω����荞�݃t���O�N���A
}
int main(void)
{
CLKDIV = 0; // �N���b�N1/1
TRISA = 0b0000000000011110; //RA1-4�͓��́A���̑��o��
TRISB = 0b0100011100000100; //���́FRA2-3,RB3:out 8-10,14 ���F�o��
//AD1CON1���W�X�^�̐ݒ�
AD1CON1bits.ADON = 1; //A/D�R���o�[�^���W���[���L��
AD1CON1bits.ADSIDL = 0; //�A�C�h�����[�h�������W���[������p��
AD1CON1bits.FORM1 = 0; //AD1CON1bits.FORM0 ��2�r�b�g�ŃZ�b�g
AD1CON1bits.FORM0 = 0; //00: �����Ȃ������@�i�Q�l�j11�F�����Ȃ��Œ菭���A10�F�Œ菭���A01�F����
//���@Michrochip PIC24FJ64GA002�̃f�[�^�V�[�g�ł�00��Integer�ƂȂ��Ă��邪Unsigned Integer�̌�A�ł���B�@
AD1CON1bits.SSRC2 = 1; //AD1CON1bits.SSRC2-AD1CON1bits.SSRC0 �ŃZ�b�g
AD1CON1bits.SSRC1 = 1; //111�F�@�����J�E���^�ŃT���v�����O���I�������ϊ����J�n����
AD1CON1bits.SSRC0 = 1; //�i�Q�l�j000�F�@SAMP�r�b�g�ŃT���v�����O���I�����ϊ����J�n����
AD1CON1bits.ASAM = 0; //SAMP�r�b�g�̃Z�b�g�ŃT���v�����O���J�n����B�@�i�Q�l�j1�F�@�����J�n�i�O�̕ϊ��I���シ���T���v�����O���J�n����j
AD1CON1bits.SAMP = 0; //�T���v�����O��~
//AD1CON2���W�X�^�̐ݒ�
AD1CON2bits.VCFG2 = 0; //AD1CON2bits.VCFG2 - AD1CON2bits.VCFG0�iVCFG��2�F0���j��3�r�b�g�ŃZ�b�g
AD1CON2bits.VCFG1 = 0; //000�F���t�@�����X�d���@���@Vdd�@-Vss
AD1CON2bits.VCFG0 = 0; //�i�Q�l�j001�F���t�@�����X�d�� �� �O������ -�@Vss ��
AD1CON2bits.CSCNA = 1; //�}���`�v���N�TMUXA�ł̃X�L�����F�@����
AD1CON2bits.SMPI3 = 0; //AD1CON2bits.SMPI3 - AD1CON2bits.SMPI0�iSMPI<3:0>�j��4�r�b�g�ŃZ�b�g
AD1CON2bits.SMPI2 = 0; //0000�F�@AD�ϊ��������̊��荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI1 = 0; //(�Q�l�j0011�F�@4�T���v����AD�ϊ��I���� ���荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI0 = 0; //
AD1CON2bits.BUFM = 0; //�o�b�t�@�[��1��16���[�h�o�b�t�@�Ƃ���B�@�i�Q�l�j1�F�@2�g��8���[�h�o�b�t�@�[�Ƃ���
AD1CON2bits.ALTS = 0; //���MUXA����̓}���`�v���N�T�ɂ���@�i�Q�l�j1�F�@MUXA,MUXB�����݂ɂ���
//AD1CON3���W�X�^�̐ݒ�
AD1CON3bits.ADRC = 0; //AD�ϊ��N���b�N���F�V�X�e���N���b�N�@�i�Q�l�j1�F�@A/D����RC�N���b�N
AD1CON3bits.SAMC4 = 1; //AD1CON3bits.SAMC4 - AD1CON3bits.SAMC0(SAMC<4:0>)��5�r�b�g�ŃZ�b�g
AD1CON3bits.SAMC3 = 1; //�A�N�C�W�V�����^�C���iTad�i�N���b�N�����j�~N�j�ݒ�
AD1CON3bits.SAMC2 = 1; //1111�F 31Tad
AD1CON3bits.SAMC1 = 1; //�i�Q�l�j0001�F 1Tad �@0010�F 2Tad �@�@�@0011�F 3Tad�@�@�E�E�E�E
AD1CON3bits.SAMC0 = 1; //
AD1CON3bits.ADCS7 = 0; //AD1CON3bits.ADCS7 -�@AD1CON3bits.ADCS0�iADCS��7�F0���j��8�r�b�g�ŃZ�b�g
AD1CON3bits.ADCS6 = 0; //AD�ϊ��̃N���b�N�ƃN���b�N���̊W
AD1CON3bits.ADCS5 = 0; //0000 0101�F�@1Tad = 5Tcy
AD1CON3bits.ADCS4 = 0; //�i�Q�l�j 0000 0000�F�@1Tad�@=�@0.5Tcy
AD1CON3bits.ADCS3 = 0; // 0000 0001�F�@1Tad = 1.0Tcy
AD1CON3bits.ADCS2 = 1; // 0000 0010�F�@1Tad�@=�@1.5Tcy
AD1CON3bits.ADCS1 = 0; // �@�@�E�E�E�E�@�@�@�@
AD1CON3bits.ADCS0 = 1; //�@�@�@�@�@1111 1111�F 1Tad = 128Tcy
//AD1CHS���W�X�^�̐ݒ�
AD1CHSbits.CH0NB = 0; //�}���`�v���N�TMUXB�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SB3 = 0; //AD1CHSbits.CH0SB3 - AD1CHSBbits.CH0SB0�i��CH0SB��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SB2 = 0; //�}���`�v���N�TMUXB�̐������͑I��
AD1CHSbits.CH0SB1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SB0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
AD1CHSbits.CH0NA = 0; //�}���`�v���N�TMUXA�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SA3 = 0; //AD1CHSbits.CH0SA3 - AD1CHSbits.CH0SA0�i��CH0SA��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SA2 = 0; //�}���`�v���N�TMUXA�̐������͑I��
AD1CHSbits.CH0SA1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SA0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
//AD1PCFG���W�X�^�̐ݒ�@�@
//�@���f�o�C�X���Z�b�g�ł͑S�r�b�g0�ƂȂ邽�߃f�t�H���g�ł̓A�i���O���͂ƂȂ�̂Ńf�W�^���Ŏg�����d�s���́A�R���t�B�O���[�V�����Ńf�W�^���ݒ肪�K�v!!�@
//PIC24FJ64GA002�ɂ͂Ȃ��s���E�ݒ�����ɕK�v�Ȃ����ݒ�
AD1PCFGbits.PCFG15 = 1;//RA15/AN15�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG14 = 1;//RA14/AN14�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG13 = 1;//RA13/AN13�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG12 = 1;//RA12/AN12�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG11 = 1;//RA11/AN11�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG10 = 1;//RA10/AN10�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG9 = 1;//RA9/AN9�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG8 = 1;//RA8/AN8�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG7 = 1;//RA7/AN7�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG6 = 1;//RA6/AN6�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG5 = 1;//RA5/AN5�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG4 = 1;//RA4/AN4�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG3 = 1;//RA3/AN3�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG2 = 1;//RA2/AN2�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG1 = 0;//RA1/AN1�A�i���O����or�f�W�^�����͑I���F�@�A�i���O�@�i�Q�l�j0�F�@�A�i���O�@��AN1�̂݃A�i���O����
AD1PCFGbits.PCFG0 = 1;//RA0/AN0�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�f�W�^��
// AD1CSSL���W�X�^�̐ݒ�
//�ǂݍ��ރ`�����l���i���͒[�q�j���Z�b�g����
AD1CSSLbits.CSSL15 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL14 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL13 = 0; //AN13��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL12 = 0; //AN12��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL11 = 0; //AN11��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL10 = 0; //AN10��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL9 = 0; //AN9��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL8 = 0; //AN8��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL7 = 0; //AN7��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL6 = 0; //AN6��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL5 = 0; //AN5��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL4 = 0; //AN4��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL3 = 0; //AN3��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL2 = 0; //AN2��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL1 = 1; //AN1��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������@��AN1�̃`�����l�������ǂݍ���
AD1CSSLbits.CSSL0 = 0; //AN0��MUXA�ŃX�L��������@�i�Q�l�j0�F�@�X�L�������Ȃ�
/// �C���^�[�o���^�C�}�P�@�����@45.3��sec�@�i���f�[�^�T���v�����O�����j
OpenTimer1
(
T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����ON
T1_PS_1_1 & //�v���X�P�[���@1/1 1/8 1/64 1/256
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT, //�N���b�N���F�����N���b�N
724 //�T���v�����O���g���@22.05KH��
// 362 //�T���v�����O���g���@44.1KHz //SPI�]�����x�i���F1Mbps�j�A�b�v�A�A���S���Y�������������K�v
//�@�� 22.68�~�i32MHz/2MHz)=362.88 �@���@363
); //PR1 = 363 - 1 = 362
CNPU1 = 0b0000000000000001; //CN0(RA4),CN7�iRB3)�@�@�v���A�b�v����|�[�g
CNPU2 = 0b0100000011100001; //CN16(RB10),CN21(RB9),CN22(RB8),CN23(RB7),CN29(RA3),CN30�iRA2)�@�v���A�b�v����|�[�g�@
CNEN1 = 0b0000000000000001; //CN0(RA4)�@�@�ω����荞�݂�������|�[�g�@
CNEN2 = 0b0100000000000000; //CN30�iRA2)�́@�ω����荞�݂�����//���̂�RA3(�s��10�j��ω�����������Ɖ����łȂ�
IPC4bits.CNIP = 6; //�ω����荞�ݗD�惌�x���F6 //�^�C�}�P�����݁i�D�惌�x��5�j��荂�D�抄�荞�݂ɐݒ�
IEC1bits.CNIE = 1; //�ω������݁F���荞����
// SPI�̃s������t��
RPINR20bits.SDI1R = 7; // SDI1��RP7��
RPOR3bits.RP6R = 8; // SCK1��RP6��
RPOR2bits.RP5R = 7; // SDO1��RP5��
RPINR22bits.SDI2R = 10; // SDI2��RP15��
RPOR6bits.RP12R = 11; // SCK2��RP13��
RPOR5bits.RP11R = 10; // SDO2��RP14��
///�@�t���\���p�A UART1�����ݒ�@19200bps 8�r�b�g �p���e�B�Ȃ��A�t���[����Ȃ�
RPOR0bits.RP0R = 3; // UART1�s�����t�@���}�b�s���O�@UART1 TX to RP0�iRB0�@�s��4�ԁj
U1BRG = 52; // 19200bps at �V�X�e���N���b�N32MHz
//U1BRG = (Fosc(Hz)/2/16/baud(bps) - 1
// = 32000000/2/16/19200 - 1 = 52.08 �� 52
U1MODE = 0b1000100000000000; // UART1�����ݒ�
U1STA = 0b0000010000000000; // UART1�����ݒ�
LATBbits.LATB4 = 0; //CS = 0;
VS1011_Init(); //�@VS1011e�̏�����
Volume = 0x08; // ���ʂ̏����ݒ�
SetVolume(Volume, Volume);
BASS = 0; // �o�X�u�[�X�g�̏����ݒ�
SetBassBoost(BASS,15);
delay_ms(1000);
while(!FSInit()); // FAT�̏�����
result = FindFirst("*.*", ATTR_ARCHIVE, rptr); //�ŏ��̃t�@�C���̃T�[�`�i���[�g������MP3�t�@�C�������邱�Ƃ��O��j
if(result == 0)
{
fptr = FSfopen(Record.filename, "r"); // �t�@�C���̃I�[�v��
str_filename = Record.filename;
}
Mode = 0;
playmode_LCD();
LATBbits.LATB3 = 1; //LED�@����
while(1)
{
if(Mode == 0)play(); //�����[�h
else SD_write(); //�^�����[�h
}
}
//----------------------------------------------------------------------------------------------------------
//VS1011.h�AVS1011.c�́@��ՓN�炳�����v���ꂽ�t�@�C���ł�
/*********************************************************************
* VS1011E�p�w�b�_�t�@�C���@�F�@VS1011.h�@
�@
*
********************************************************************/
#include "GenericTypeDefs.h"
/** Delay���p�N���b�N���g����`�@**/
#define CLOCK 16 // MHz
/** �|�[�g�̒�`�@*/
#define MP3_DREQ_TRIS (TRISBbits.TRISB14) // Data Request
#define MP3_DREQ_IO (PORTBbits.RB14)
#define MP3_XRESET_TRIS (TRISAbits.TRISA0) // Reset, active low
#define MP3_XRESET_IO (LATAbits.LATA0)
#define MP3_XDCS_TRIS (TRISBbits.TRISB15) // Data Chip Select
#define MP3_XDCS_IO (LATBbits.LATB15)
#define MP3_XCS_TRIS (TRISBbits.TRISB13) // Control Chip Select
#define MP3_XCS_IO (LATBbits.LATB13)
/* SPI��SPI2���g�p�@*/
#define MP3_SCK_TRIS (TRISBbits.TRISB12)
#define MP3_SDI_TRIS (TRISBbits.TRISB10)
#define MP3_SDO_TRIS (TRISBbits.TRISB11)
#define MP3_SPI_IF (IFS2bits.SPI2IF)
#define MP3_SSPBUF (SPI2BUF)
#define MP3_SPICON1 (SPI2CON1)
#define MP3_SPICON1bits (SPI2CON1bits)
#define MP3_SPICON2 (SPI2CON2)
#define MP3_SPISTAT (SPI2STAT)
#define MP3_SPISTATbits (SPI2STATbits)
/* ���v���g�^�C�s���O�@*/
BYTE WriteSPI(BYTE output);
void Command(BYTE RegAdrs, BYTE UpData, BYTE LowData);
void SendData(BYTE Data);
void delay_ms(int msec);
void VS1011_Init(void);
void VS1011_SineTest(void);
void SetVolume(BYTE right, BYTE left);
void SetBassBoost(BYTE bass, BYTE gfreq);
void PlayEnd(void);
//---------------------------------------------------------------------------------------------------------
//---------------------------------------------------------------------------------------------------------
//VS1011.h�AVS1011.c�́@��ՓN�炳�����v���ꂽ�t�@�C���ł�
/*****************************************************
*�@�@VS1011E�@���䃉�C�u���� : VS1011.c
*
******************************************************/
#include "VS1011.h"
#include <p24FJ64GA002.h>
/************************************
* SPI Read after Write�@��{��
************************************/
BYTE WriteSPI(BYTE output){
MP3_SPI_IF = 0; // ���荞�݃t���O�N���A
MP3_SSPBUF = output; // SPI�o��
while(!MP3_SPI_IF); // ���͑҂�
return MP3_SSPBUF; // ���̓f�[�^�߂�l
}
/************************************
* VS1011�p�R�}���h�o�͊�
************************************/
void Command(BYTE RegAdrs, BYTE UpData, BYTE LowData){
MP3_XDCS_IO = 1; // �f�[�^���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �R�}���h���[�h�ݒ�
WriteSPI(0x02); // �������ݓ���w��
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�o��
WriteSPI(UpData); // ��ʃo�C�g�o��
WriteSPI(LowData); // ���ʃo�C�g�o��
MP3_XCS_IO = 1; // �R�}���h���[�h����
}
/************************************
* VS1011�p�R�}���h�o�͊�(�m�F�t��)
************************************/
void CmdCheck(BYTE RegAdrs, BYTE UpData, BYTE LowData){
BYTE b1,b2;
do{
MP3_XDCS_IO = 1; // �f�[�^���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �R�}���h���[�h�ݒ�
WriteSPI(0x02); // �������ݓ���w��
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�o��
WriteSPI(UpData); // ��ʃo�C�g�o��
WriteSPI(LowData); // ���ʃo�C�g�o��
MP3_XCS_IO = 1; // �R�}���h���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �ǂݍ��݊m�F
WriteSPI(0x03); // �ǂݍ��ݓ���
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�w��
b1 = WriteSPI(0xFF); // return UpData
b2 = WriteSPI(0xFF); // return LowData
MP3_XCS_IO = 1;
}while((b1 != UpData) || (b2 != LowData));
}
/************************************
* VS1011�p�f�[�^�o�͊�
************************************/
void SendData(BYTE Data){
while(!MP3_DREQ_IO); // ���f�B�[�҂�
WriteSPI(Data);
}
/***********************************************
* ���ʃ��x���ݒ��
* vRight = �E�`���l���p����
* vLeft = ���`���l���p����
*�@�@ ��������@0x00=Max 0dB 0.5dB�X�e�b�v�ʼn�����
************************************************/
void SetVolume(BYTE vRight, BYTE vLeft){
Command(0x0B, vRight, vLeft);
}
/**********************************************
* �ቹ�u�[�X�g�ݒ萧���
* bass�F �ቹ�Q�C���@�����W��0dB����15dB�͈̔�
* gfreq: �ቹ�u�[�X�g���g���ݒ�@10Hz�X�e�b�v�@0�`15�͈̔�
***********************************************/
void SetBassBoost(BYTE bass, BYTE gfreq)
{
BYTE temp1 = 0;
/* �ݒ�͈͂̐��� */
if(bass > 15)
bass = 15;
if(gfreq > 15)
gfreq = 15;
/* 8�r�b�g�ɍ��� */
temp1 = gfreq;
temp1 |= (bass << 4);
Command(0x02, 0xFF, temp1); // BASS
return;
}
/*********************************************
* ���I��������
*
*********************************************/
void PlayEnd(void){
int i;
/* �Đ��o�b�t�@�N���A�̂���2048�o�C�g���M�@*/
MP3_XDCS_IO = 0; // XDCS�I��
for(i=0; i<2048; i++)
SendData(0); // 0�̃f�[�^�A�����M
MP3_XDCS_IO = 1; // XDCS�I�t
/*** �\�t�g�E�F�A���Z�b�g�Ŋ��� **/
Command(0x00, 0x08, 0x24); // SM_RESET���M
while(!MP3_DREQ_IO); // �R�}���h�����҂�
}
/********************************************
* VS1011 ��������
* VS1011�]�����[�h�ASDI�e�X�g���[�h�@�ɐݒ�
* VS1011�Ɛ���ɒʐM�ł��Ȃ��Ɖi�v�҂��ƂȂ�
*********************************************/
void VS1011_Init(void){
unsigned int val;
/***** VS1011�p�|�[�g�̏����ݒ� ***/
MP3_XDCS_IO = 1; // DCS��High
MP3_XCS_IO = 1; // XCS��High
MP3_XRESET_IO = 0; // XRESET��Low
MP3_XRESET_TRIS = 0; // �o��TRIS�L����
MP3_DREQ_TRIS = 1; // DREQ���̓��[�h��
MP3_XDCS_TRIS = 0; // XDCS�o��/////////
MP3_XCS_TRIS = 0; // XCS�o��
MP3_SDI_TRIS = 1; // SDI2���̓��[�h
MP3_SDO_TRIS = 0; // SDO2�o�̓��[�h
MP3_SCK_TRIS = 0; // SCK2�o�̓��[�h
/***** SPI2�̏����ݒ� ***/
MP3_SPICON1 = 0x003E; // 8�r�b�g���[�h,CKP = 0,CLK=Fosc/4 (4MHz)
// �����ŃT���v��(SMP=0) �����G�b�W�ő��M(CKE=1)
MP3_SPICON2 = 0; // �t���[�����[�h�Ȃ�
MP3_SPI_IF = 0; // ���荞�݃t���O�N���A
MP3_SPISTATbits.SPIEN = 1; // SPI2�C�l�[�u��
/* RESET�����AVS1011�X�^�[�g */
delay_ms(50); // 50msec delay
MP3_XRESET_IO = 1; // RESET����
/** ���[�h�ݒ�@*/
CmdCheck(0x00, 0x08, 0x20); // ���[�h�����ݒ�@�V���[�h�ASDI�e�X�g���[�h
/* �N���b�N�_�u���ݒ�@*/
val = 12288 / 2 + 0x8000; // �ݒ�l�����߂�i�f�[�^�V�[�g���j
CmdCheck(0x03, (BYTE)(val /256), (BYTE)val);
delay_ms(10);
}
/********************************************
* VS1011 �����g�e�X�g���[�h�ݒ��
* MODE��SPI�e�X�g���[�h�ɐݒ肵�Ă����K�v������
*********************************************/
void VS1011_SineTest(void)
{
/* �e�X�g���[�h�V�[�P���X�o�� */
while(!MP3_DREQ_IO);
MP3_XDCS_IO = 0;
// Start Sine Test
WriteSPI(0x53);
WriteSPI(0xEF);
WriteSPI(0x6E);
WriteSPI(0x7D); // 22.050kHz Out is 5kHz
WriteSPI(0x00);
WriteSPI(0x00);
WriteSPI(0x00);
WriteSPI(0x00);
MP3_XDCS_IO = 1;
}
/****************************
* usec�P�ʃf�B���C��
****************************/
void delay_us(int usec){
usec = (int)(CLOCK*usec)/ 10;
while(usec) {
asm("NOP");
asm("NOP");
asm("NOP");
asm("NOP");
asm("NOP");
usec--;
}
}
/***************************
* msec�P�ʃf�B���C��
***************************/
void delay_ms(int msec){
int i;
for(i=0; i< msec; i++)
delay_us(1000);
}
//------------------------------------------------------------------------------------------------
//--------------------------------------------------------------------------------------------------
//******************************************************************
//�@ ��M���@PIC
//******************************************************************
#include <16F873.h>
#use delay(clock=10000000)
#FUSES HS,NOWDT,,PUT,BROWNOUT,NOPROTECT,NOLVP
#use RS232(BAUD=19200,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#define STX 0x02 // �r�s�w
#use fast_io(B)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_B
#define output_x output_B
#define set_tris_x set_tris_B
#define rs PIN_B1 //chip select
#define stb PIN_B0 //strobe
#include <1lcd_lib.c>
int n = 0,i=0;
char RX1[17],RX2[17];
char RX1_LCD[17],RX2_LCD[17];
int data1;
int LineMode = 1;
void LCD()
{
data1 = getc();
switch(data1)
{
case '\r':
LineMode = 1; // 1�s�ڂ̃��[�h
n = 0; // �������M���ԃ��Z�b�g
break;
case '\n': // lcd_cmd(0xC0); case 0x0a: LF('\n')�Ȃ�@�Q�s�ڂ̐擪��
LineMode = 2;
n = 0; // �������M���ԃ��Z�b�g
break;
case STX: //�@�\���J�n����
for(i = 0; i < 16; i++)
{
RX1_LCD[i] = RX1[i]; //�P�s�ڂ̃f�[�^
RX1_LCD[16] = '\0';
RX2_LCD[i] = RX2[i]; //�Q�s�ڂ̃f�[�^
RX2_LCD[16] = '\0';
}
lcd_clear(); //�t���N���A
printf(lcd_data,RX1_LCD); //�P�s�ڂ̃f�[�^���ꊇ�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
printf(lcd_data,RX2_LCD); //�Q�s�ڃf�[�^���ꊇ�t���\��
break;
default:
switch(LineMode)
{
case 1: //�P�s�ڂ̃f�[�^
RX1[n] = data1; break;//�P�s�ڃf�[�^���������ɋL��
case 2: //�Q�s�ڂ̃f�[�^
RX2[n] = data1; break;//�Q�s�ڃf�[�^���������ɋL��
default: break;
}
n++;
break;
}
}
main(){
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"First Line");
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Second Line");
// delay_ms(500);
while(1)
{
if(kbhit()) LCD(); //RS232C�̃f�[�^�i�P�o�C�g�j����M�������Ă���Ȃ�@LCD()���s
}
return 0;
}
//------------------------------------
//���̑��@FAT�֘A�̃C���N���[�t�@�C���͉��L�ɂ���܂��B
//�@�E�uC����ł͂��߂�PIC24F���p�K�C�h�u�b�N�v��ՓN�璘�@�i�Z�p�]�_�Ёj
//�@�E��ՓN�炳��̃z�[���y�[�W�F�@�d�q�H��������@PIC24F�����
�����쌋�ʁ�
�P�D�@�t�����
| �@�@ |
�t����� |
���l |
| mp3�t�@�C������ |
 |
�G�f���̓�(�t�@�C�����FEDENEAST.mp3�j�����t���̉t����ʁ@�@�@�@�@�@�@�@�@ |
| wav�t�@�C���^���� |
 |
�}�C�N����̉�����WAV�t�@�C���i�t�@�C�����FVOICE.wav)�ɘ^�����̉t�����
|
| wav�t�@�C������ |
 |
�^������WAV�t�@�C���i�t�@�C�����FVOICE.WAV)���Đ����̉�ʁ@�@ |
�Q�D�@�^������wav�t�@�C���i��j
�@����i�Ř^�������@wav�t�@�C���iVOICE.wav�j�ł��B�@PC�ōĐ����Ă݂Ă��������B
�R�Dwav�t�@�C���̃o�C�i���[�f�[�^
�@��L�Q�D��VOICE.wav�t�@�C���̓������o�C�i���[�G�f�B�^�ŕ\���������̂��ȉ��Ɏ����܂��B
���t�@�C���w�b�_������
�@�E�t�@�C���T�C�Y�@�c�c596,024�o�C�g�@�i = 0x00091838�o�C�g�j�@�i���j
�@�E���k�̃t�H�[�}�b�gID�@�c�c�@���j�APCM
�@�E�`�����l�����@�c�c�@���m����
�@�E�T���v�����O���[�g�c�c22050�@Hz
�@�E�f�[�^�]�����x�@�c�c44100�@�o�C�g/sec
�@�EBlock�@align�@�c�c�@2�@�o�C�g/�T���v��
�@�E�ʎq���r�b�g���c�c16�r�b�g
�@�E�f�[�^�T�C�Y�c�c595,968�o�C�g�@�i = 0x00091800�o�C�g�j
�i���j�G�N�X�v���[���ł݂�ƃt�@�C���T�C�Y��582KB�ł��B����̓G�N�X�v���[���ł�1KB�́A�PKB�@=�@1000�o�C�g�ł͂Ȃ��@1KB�@=�@1024�o�C�g��
�@�@�@���덷�i�H�j���炭����̂ł��B
�@�@�@�@�@596024�@���@1024�@=�@582.05�@[KB]
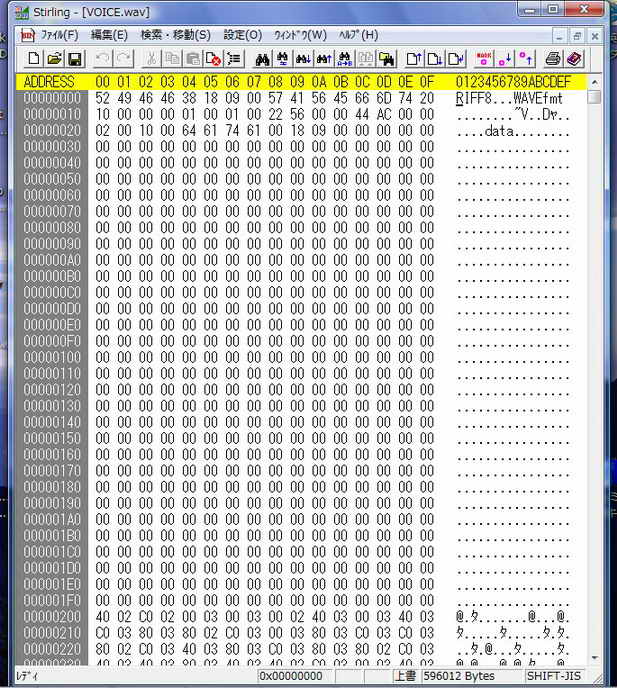
���o�C�i���[�G�f�B�^�ɂ��VOICE.WAV������
�i2) PIC32MX795F512L ��
�@�@PIC32MX�ł����삵�܂����̂ŏЉ�܂��B�@�d�l�� ��L��PIC24FJ64GA002�Ɠ����ł��B
PIC32MX795F512L���g�p�����AWAV�t�@�C���`���^���@�\�t��MP�R�v���[���[���Љ�܂��BMP3�̃f�R�[�_�[IC�Ƃ��Ă�VS1011E��
�g�p���Ă��܂��B�@VS1011E�̃��C�u�������iVS1011.h�AVS1011.c�j����ՓN�����v���ꂽ���̂ł��B��Ղ���ɂ͖{�v���[���[�����
������M�d�ȃA�h�o�C�X�𑽁X���������܂����B
�@
�@���@mp3�f�R�[�_�[IC VS1011E�́@QFP���L�o���Ƀn���_�t������A�[�q��2.54�C���`�̃s���w�b�_�[�R�l�N�^�ɕϊ����ꂽ���́i700�~/�j��
�@�@�@�H���d�q���̔�����Ă��܂��B���͂���������Ď���i�삵�܂����B
������i�̎d�l��
�E�Đ����[�h�Ƙ^�����[�h��L���邱�ƁB�Đ��A�^���̃��[�h�ؑւ̓������^���[�X�C�b�`�ł����Ȃ�����
�Emp3�t�@�C���ɂ��Ă͍Đ��݂̂Ƃ��A�G���R�[�h�@�\�͂��Ȃ�
�Emp3�Awav�`����SD�J�[�h�Ɏ��^����Ă��鉹�y�E�����f�[�^���Đ��ł��邱��
�Emp3�t�@�C���̃f�R�[�_IC�Ƃ��āAVS1011E���g�p���邱��
�E�Đ���SD�J�[�h���ɂ��鉹�y�E�����f�[�^�����Ԃɂ����Ȃ��B�A���A�X�L�b�v�{�^�����������Đ��f�[�^���X�L�b�v�ł���悤�ɂ��邱��
�E�^���́A�}�C�N���x���̉����M������PIC��AD�ϊ����āA�f�[�^��SD�J�[�h��WAV�`���̃t�@�C���Ƃ��ăt�@�C�����邱��
�E�^������WAV�t�@�C���̏����͉��L�Ƃ���
�@�@���k�̃t�H�[�}�b�gID�@�c�c�@���j�APCM
�@�A�`�����l�����@�c�c�@���m����
�@�B�T���v�����O���[�g�c�c22050�@Hz
�@�C�f�[�^�]�����x�@�c�c44100�@�o�C�g/sec
�@�DBlock�@align�@�c�c�@2�@�o�C�g/�T���v��
�@�E�ʎq���r�b�g���c�c16�r�b�g
�E�^������t�@�C������VOICE.wav�Ƃ���BSD�J�[�h���̃��[�g�ɂ��̃t�@�C�����̃t�@�C�������݂��Ȃ��ꍇ�̓t�@�C�������邱�ƁB�@�܂��A�@
�@���ł�VOICE.wav�����݂���ꍇ�͏㏑��������̂Ƃ���B
�E�L�����N�^�t���ɂ��A�^��/�Đ����̃t�@�C������\������B
������i�̉�H�}���@�@�i���@��H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//MPLAB X
//main.c
//------------------------------------------------------------------------------------------
//32MX795 MEB SD Play with wave Recorder
#include <p32xxxx.h>
#include <plib.h> // PIC32 peripheral library
#include "1lcd_lib_C32.h"
#include "FSIO.h"
#include "VS1011.h"
#define STX 0x02 //STX
#define ETX 0x03 //ETX
// configuration CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
//WAVE�t�@�C���w�b�_�\���̒�`
struct myWaveHeader //�S�w�b�_�T�C�Y�F�@44�o�C�g
{
char id_RIFF[4]; //Chunk ID RIFF�w�b�_�@//�@4�o�C�g
unsigned int size_file; //�t�@�C���T�C�Y�i���t�@�C���T�C�Y - 8�j�o�C�g�@//4�o�C�g
char id_WAVE[4]; //Chunk ID WAVE //4�o�C�g
char id_fmt[4]; //Chunk ID fmt //4�o�C�g
unsigned int size_fmt; //�t�H�[�}�b�g�֘A��`�f�[�^�̃T�C�Y //4�o�C�g
unsigned short int code_wavefmt; //WAVE�t�@�C���̈��k�t�H�[�}�b�g�R�[�h�@�A���A���j�APCM�͈��k�Ȃ�//2�o�C�g
unsigned short int channel; //�`�����l�����@//2�o�C�g
unsigned int rate_sample; //�T���v�����O���[�g //4�o�C�g
unsigned int rate_tranfer; //�]�����x[byte/sec]�@//4�o�C�g
unsigned short int align_block; //�T���v��������̃o�C�g��[byte/�T���v��] //2�o�C�g
unsigned short int bit_sample; //�ʎq���r�b�g��[bit] //2�o�C�g
char id_data[4]; //Chunk ID data //4�o�C�g
unsigned int size_data; //�T���v�����O�f�[�^�̃T�C�Y[byte]�@//4�o�C�g
}
;
struct myWaveHeader mywaveheader = //�@WAVE�t�@�C���w�b�_�\���̂̏������@�@�@//44�o�C�g
{
"RIFF", //Chunk ID RIFF �@//�@4�o�C�g
0x0006C28C, //�i���j�t�@�C���T�C�Y�F 443020�o�C�g�@//���ɒl�ɈӖ��Ȃ�
"WAVE", //Chunk ID WAVE //4�o�C�g
"fmt ", //char id_fmt[4]; //Chunk ID fmt //4�o�C�g
16, //16�o�C�g�@at ���j�APCM �t�H�[�}�b�g�֘A��`�f�[�^�̃T�C�Y //4�o�C�g
0x0001, //WAVE�t�@�C���̈��k�t�H�[�}�b�g�R�[�h�F ���j�APCM //2�o�C�g
1, //�`�����l�����F�@���m�����@ //2�o�C�g
22050, //�T���v�����O���[�g�F�@22.05[KHz] //4�o�C�g
44100, //�]�����x�F�@44100[byte/sec]�@//4�o�C�g //�T���v�����O���[�g�F�@22.05[Hz]
2, //�T���v��������̃o�C�g���F�@2[byte]/�T���v�� //2�o�C�g
16, //�ʎq���r�b�g���F�@16[bit] //2�o�C�g
"data", //Chunk ID data //4�o�C�g
0x0006C267 ////�i���j�T���v�����O�f�[�^�̃T�C�Y�F�@442983�o�C�g�@//���ɒl�ɈӖ��Ȃ�
};
struct myWaveHeader* ptrWH; //�\���̂̃|�C���^
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
unsigned int Buf_Input[3]; //SD�J�[�h�������ݒl
unsigned int Buf_SD[3]; //SD�J�[�h�Ǎ��ݒl
// FAT�t�@�C���p�\���̂̃|�C���^�ϐ�
FSFILE* pfile; //SD�J�[�h�̃t�@�C���|�C���^ //FSFILE *fptr;
size_t result;
BYTE Buffer[256];
SearchRec Record;
SearchRec *rptr = &Record;
int i;
// MP3�p�ϐ�
BYTE Volume, ChgFlag, BASS;
int Mode = 0; //�^��/�����[�h�@0�F���@1�F�^��
unsigned int adr_SD;
unsigned int count_block = 0; //SD���M�u���b�N�i512�o�C�g�j��
unsigned int size_dataBlock = 512;
int count_buf1 = 0; //�o�b�t�@�P�f�[�^��
int count_buf2 = 0; //�o�b�t�@�Q�f�[�^��
int flag_buf1 = 0; //�����f�[�^�o�b�t�@�P�̏�ԁ@
int flag_buf2 = 0; //�����f�[�^�o�b�t�@�Q�̏��
// 0�F�����f�[�^��M�\��ԁ@1�FSD�։����f�[�^���M�\���
int mode_tranceive = 0; //����M���[�h //0�F�@�o�b�t�@�P=�����^��M�A�o�b�t�@�Q=SD���M
//�P�F�@�o�b�t�@�P=SD���M���[�h�A�o�b�t�@�Q=������M
short int data1_sound[512]; //�����f�[�^�o�b�t�@�P
short int data2_sound[512]; //�����f�[�^�o�b�t�@�Q
char* str_filename;
int Stop_SDwriting = 0;//�@1�F�@SD�J�[�h�ւ̏����ݒ�~�@0�F�@��������
int Next = 0;
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
void LcdCheck(void)
{
INTDisableInterrupts(); //�S���荞�֎~ // SPI�������͊��荞�֎~
lcd_clear(); // �S����
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"M=%d block=%d",Mode,count_block); //
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"result=%d",result);
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
while(1);
}
void wav_end(void) //�^���t�@�C����������
{
unsigned int result;
int count_N;
mywaveheader.size_data = count_block * 1024 ; //[�o�C�g]
mywaveheader.size_file = count_block * 1024 + sizeof mywaveheader - 8; //[�o�C�g]
delay_ms(100);
result = FSfseek(pfile,0,SEEK_SET); //�t�@�C���̐擪�Ƀt�@�C���|�C���^�̈ʒu���ړ�
delay_ms(100);
result = FSfwrite((const void*)ptrWH,sizeof(struct myWaveHeader),1,pfile); //�t�@�C���Ƀw�b�_�[�������
delay_ms(100);
result = FSfclose(pfile); // �t�@�C�������
}
void SD_write()
{
if(mode_tranceive == 0) //�o�b�t�@�Q=SD���M�A�o�b�t�@�P=������M���[�h
{
if(flag_buf2 == 1) //�o�b�t�@�Q��SD�֑��M�\��Ԃ̏ꍇ�E�o�b�t�@�P�͉�����M�\���
{
// FSfwrite((const void*)data2_sound,sizeof(short int),size_dataBlock,pfile);//SD�J�[�h�Ƀf�[�^��������
FSfwrite((const void*)data1_sound,sizeof(short int),size_dataBlock,pfile);//SD�J�[�h�Ƀf�[�^��������
count_block++;
flag_buf2 = 0; //���@�o�b�t�@�Q���M�����A��M�\���
}
}
else //�o�b�t�@�P=SD�֑��M�A�o�b�t�@�Q=������M���[�h
{
if(flag_buf1 == 1) //�o�b�t�@�P��SD�֑��M�\��Ԃ̏ꍇ�E�o�b�t�@�Q�͉�����M�\���
{
// FSfwrite((const void*)data1_sound,sizeof(short int),size_dataBlock,pfile);//SD�J�[�h�Ƀf�[�^��������
FSfwrite((const void*)data2_sound,sizeof(short int),size_dataBlock,pfile);//SD�J�[�h�Ƀf�[�^��������
count_block++;
flag_buf1 = 0; //���@�o�b�t�@�P���M�����A��M�\���
}
}
if(Stop_SDwriting == 1) //
{
delay_ms(200);
wav_end(); //�^��wav�t�@�C���I������
Mode = 0; //���y�����[�h��
delay_ms(1000);
pfile = FSfopen("VOICE.WAV", "r"); // �t�@�C���̃I�[�v��
}
}
void __ISR(4,ipl5)T1Hander(void) //�^�C�}�P�����@45.3��sec���i22.05 KHz�j
{
unsigned int temp1;
int temp2;
mT1ClearIntFlag(); //�t���O�N���A
AD1CON1bits.SAMP =1; //�T���v�����O�J�n
while(!AD1CON1bits.DONE); //AD�ϊ��I���t���O�����i�P�ɂȂ�܂Łj�҂�
temp1 = ADC1BUF0; //ADC1��AN1�̃o�b�t�@�[����AD�ϊ����ʂ�Ǎ���
temp2 = temp1*64 - 32768; //32768 = 64*1024 / 2; //��������x���F32768�i = unsigned int / 2)
if(temp2 >= 32767) temp2 = 32767; //�������x���N���b�v
if(temp2 <= -32768)temp2 = -32768;
//���M�D��F�@�����M�f�[�^���o�b�t�@�Ɏc���Ă���ꍇ�͓��͂��鉹���f�[�^�͖�������@
if(mode_tranceive == 0) //�o�b�t�@�P=������M�A�o�b�t�@�Q=SD���M
{
if(flag_buf1 == 0) //�o�b�t�@�P����M�\��ԂȂ�
{
LATDbits.LATD2 = 0;
delay_us(2);
data1_sound[count_buf1] = (short int)temp2; //��M�f�[�^���o�b�t�@�\���̂P��data_sound[ ]�ɕۑ�
count_buf1++;
if(count_buf1 >= size_dataBlock)
{
count_buf1 = 0;
flag_buf1 = 1; //���@�o�b�t�@�P�F�@�����f�[�^�t���ESD�]���҂�
mode_tranceive = 1; //�o�b�t�@�P=SD���M���[�h�A�o�b�t�@�Q=������M
}
LATDbits.LATD2 = 1;
}
//�o�b�t�@�P�ɂ܂������M�����f�[�^���c���Ă����ꍇ�́A�����f�[�^�͎�M���Ȃ�
}
else //�o�b�t�@�Q=������M�A�o�b�t�@�P=SD���M
{
if(flag_buf2 == 0) //�o�b�t�@�Q����M�\��ԂȂ�
{
LATDbits.LATD3 = 0;
delay_us(2);
data2_sound[count_buf2] = (short int)temp2; //��M�f�[�^���o�b�t�@�\���̂Q��data_sound[ ]�ɕۑ�
count_buf2++;
if(count_buf2 >= size_dataBlock)
{
count_buf2 = 0;
flag_buf2 = 1; //���@�o�b�t�@�Q�F�����f�[�^�t���ESD�]���҂�
mode_tranceive = 0; //�o�b�t�@�P=�����^��M�A�o�b�t�@�Q=SD���M
}
LATDbits.LATD3 = 1;
}
}
//�o�b�t�@�Q�ɂ܂������M�����f�[�^���c���Ă����ꍇ�́A�����f�[�^�͎�M���Ȃ�
}
void __ISR(26,ipl2)ChangeInt(void) //�ω����荞�� //�X�C�b�`���o
{
if(!PORTBbits.RB0) //�Đ�/�^���{�^�����N���b�N���ꂽ�ꍇ
{
if(Mode == 0) //�Đ����[�h�̏ꍇ
{
Mode = 1; //�^�����[�h��
Stop_SDwriting = 0; //SD�J�[�h�ւ̏���������
MP3_XDCS_IO = 1; //VS1011E�@���f�[�^�M�����C��OFF
MP3_XCS_IO = 1; //VS1011E �`�b�v�Z���N�g����
FSfclose(pfile); // ���݂̃t�@�C���������N���[�Y
PlayEnd(); // ���I������
delay_ms(200);
pfile = FSfopen("VOICE.wav","w"); //�t�@�C���㏑�����݃��[�h�ŃI�[�v���@�A���t�@�C�����Ȃ���ΐV�K�t�@�C���쐬
lcd_clear(); // �S����
lcd_cmd(0x80); //1�s�ڂ̐擪��
sprintf(Buf,"VOICE.WAV"); //�t�@�C�����@//�K�{
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"On recording"); //�^�b�`Y���W�\��
lcd_str(Buf); // �J�n���b�Z�[�W2�s�ڕ\��
ptrWH = &mywaveheader; //�\���̂�mywaveheader�̐擪�A�h���X�ݒ�
FSfseek(pfile,0,SEEK_SET); //�t�@�C���̐擪�Ƀt�@�C���|�C���^�̈ʒu���ړ�
delay_ms(50);
FSfwrite((const void*)ptrWH,sizeof(struct myWaveHeader),1,pfile); //�t�@�C���Ƀw�b�_�[�������
delay_ms(50);
adr_SD = 0x2C; //�t�@�C���̐擪����0x2C(44)�o�C�g�i�����f�[�^�������݊J�n�I�t�Z�b�g�j�̂Ƃ���ɂ�
FSfseek(pfile,adr_SD,SEEK_SET);//�t�@�C���|�C���^�̈ʒu���ړ�
count_block = 0; //SD�J�[�h��512�o�C�g�P�ʂŏ����������Z�b�g
delay_ms(300);
ConfigIntTimer1(T1_INT_ON | T1_INT_PRIOR_5); //�^�C�}�P����ON�A���荞�݃��x��5
EnableIntT1; //��������
}
if((Mode == 1) && (count_block >= 10)) //�^�����[�h�@���@10�u���b�N�ȏ㏑������ł���ȂȂ�i�`���^�����O�h�~�j
{
ConfigIntTimer1(T1_INT_OFF | T1_INT_PRIOR_5); //�^�C�}�P����ON�A���荞�݃��x��5
// ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_OFF); //�^�C�}�P�F�@���荞�ݗD�惌�x���T // IPC0bits.T1IP = 5;
DisableIntT1; //�^�C�}�P�F�@���荞�֎~ //IEC0bits.T1IE = 0;
Stop_SDwriting = 1; //SD�J�[�h�����ݏI��
//1�u���b�N������I�������J�n
//�������ł����I���������s��Ȃ�����!!
}
}
if(!PORTBbits.RB1) //�X�L�b�v�{�^�����N���b�N���ꂽ�ꍇ
{
Next = 1; //�Đ����̃t�@�C���̃Z�N�^�ǂݍ��ݏI����A���̋Ȃ��Đ�
}
mCNClearIntFlag(); // �ω����荞�݃t���O�N���A //IFS1bits.CNIF = 0;
}
void play() // ���y�f�[�^�̏o��
{
int i;
ConfigIntTimer1(T1_INT_OFF | T1_INT_PRIOR_5); //�^�C�}�P����ON�A���荞�݃��x��5
//ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_OFF); //�^�C�}�P�����֎~
DisableIntT1;
if(pfile != 0) // ����ɃI�[�v���ł������H
{
do{ // �t�@�C����EOF�܂ʼn����f�[�^�A���o��
INTDisableInterrupts(); //�S���荞�֎~
MP3_XDCS_IO = 0; //#define MP3_XDCS_IO�@�@�@�@LATBbits.LATB15=0�@���@DREQ=0
result = FSfread(Buffer, 1, 256, pfile); //SD�J�[�h�̃f�[�^��256�o�C�g�P�ʂœǂݏo��
for(i= 0; i<result; i++) // �ǂݏo�����o�C�g�������J��Ԃ�
{
SendData(Buffer[i]); // ���y�f�[�^���M
}
INTEnableInterrupts(); //�S���荞����
if(Mode == 1)return; //�^�����[�h�Ȃ�@�Đ��͏I��
if(Next == 1)result = 0;
} while(result != 0); // �t�@�C����EOF�܂Ōp��
Next = 0;
MP3_XDCS_IO = 1;
// ����������
FSfclose(pfile); // �t�@�C���̃N���[�Y
PlayEnd(); // ���I������
result = FindNext(rptr); // �A���Đ��̂��ߎ��̃t�@�C����
if((result != 0) || (Record.attributes != ATTR_ARCHIVE))
FindFirst("*.*", ATTR_ARCHIVE, rptr); // �t�@�C���̏I���Ȃ�ēx�ŏ�����J��Ԃ�
pfile = FSfopen(Record.filename, "r");
str_filename = Record.filename;
lcd_clear(); // �S����
lcd_cmd(0x80); //1�s�ڂ̐擪��
sprintf(Buf,"%s ",str_filename); //�t�@�C�����@//�K�{
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
// �J�n���b�Z�[�W2�s�ڕ\��
INTEnableInterrupts(); //�S���荞����
}
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
INTEnableSystemMultiVectoredInt(); //�}���`�x�N�^�������荞����
mJTAGPortEnable(DEBUG_JTAGPORT_OFF); //JTAG������//DDPCONbits.JTAGEN = 0; //I/O�|�[�g�Ƃ���RA0�ARA1�ARA4�ARA5�������ꍇ�K�{
//AD�R���o�[�^�����ݒ� //��������
AD1PCFG = 0xFEFF; //b8=0�ȊO��1 //B�|�[�g�Fb8�ȊO�̓f�W�^���s��
TRISBbits.TRISB8 = 1; //RB8/AN8����̓s���ɐݒ�
//AD1CON1���W�X�^�̐ݒ�
AD1CON1bits.ON = 1; //A/D�R���o�[�^���W���[���L��
AD1CON1bits.SIDL = 0; //�A�C�h�����[�h�������W���[������p��
AD1CON1bits.FORM2 = 0; //AD1CON1bits.FORM2-AD1CON1bits.FORM0�̃Z�b�g�ŏo�̓f�[�^�`���w��@���@000�F16�r�b�g�����Ȃ������`��
AD1CON1bits.FORM1 = 0; //011:�����t�Œ�16�r�b�g�����@010�F�Œ菬��16�r�b�g�@001�F�����t������16�r�b�g�@000�F16�r�b�g�����Ȃ�����
AD1CON1bits.FORM0 = 0; //111�F�����t32�r�b�g�Œ菬���@110�F32�r�b�g�Œ菬���@101�F�����t32�r�b�g�����@100��32�r�b�g�����Ȃ�����
AD1CON1bits.SSRC2 = 1; //AD1CON1bits.SSRC2-AD1CON1bits.SSRC0 �̃Z�b�g�Ńg���K�[�\�[�X���w��
AD1CON1bits.SSRC1 = 1; //111�F�@�����J�E���^�ŃT���v�����O���I�������ϊ����J�n����
AD1CON1bits.SSRC0 = 1; //�i�Q�l�j000�F�@SAMP�r�b�g�ŃT���v�����O���I�����ϊ����J�n����
AD1CON1bits.CLRASAM = 0;//AD�ϊ����荞�ݎ��̕ϊ���~�@0�F���̕ϊ��l�ŃI�[�o�[���C�g
AD1CON1bits.ASAM = 0; //SAMP�r�b�g�̃Z�b�g�ŃT���v�����O���J�n����B�i�Q�l�j1�F�@�����J�n�i�O�̕ϊ��I���シ���T���v�����O���J�n����j
AD1CON1bits.SAMP = 0; //�T���v�����O��~
//AD1CON2���W�X�^�̐ݒ�
AD1CON2bits.VCFG2 = 0; //���t�@�����X�I��//AD1CON2bits.VCFG2 - AD1CON2bits.VCFG0�iVCFG��2�F0���j��3�r�b�g�ŃZ�b�g
AD1CON2bits.VCFG1 = 0; //000�F���t�@�����X�d���@���@Vdd�@-Vss
AD1CON2bits.VCFG0 = 0; //�i�Q�l�j001�F���t�@�����X�d�� �� �O������ -�@Vss ��
AD1CON2bits.OFFCAL = 0; //�r�����[�h�ݒ�@0�F�T���v���z�[���h����SHA�̓��͂�AD1CHS���W�X�^��AD1CSSL���W�X�^�Ő��䂳���
AD1CON2bits.CSCNA = 1; //�}���`�v���N�TMUXA�ł̃X�L�����F�@����
AD1CON2bits.SMPI3 = 0; //���荞�݃^�C�~���O�@AD1CON2bits.SMPI3 - AD1CON2bits.SMPI0�iSMPI<3:0>�j��4�r�b�g�ŃZ�b�g
AD1CON2bits.SMPI2 = 0; //0000�F�@AD�ϊ��������̊��荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI1 = 0; //(�Q�l�j0011�F�@4�T���v����AD�ϊ��I���� ���荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI0 = 0; //
AD1CON2bits.BUFM = 0; //�o�b�t�@�[��1��16���[�h�o�b�t�@�Ƃ���B�@�i�Q�l�j1�F�@2�g��8���[�h�o�b�t�@�[�Ƃ���
AD1CON2bits.ALTS = 0; //���MUXA����̓}���`�v���N�T�ɂ���@�i�Q�l�j1�F�@MUXA,MUXB�����݂ɂ���
//AD1CON3���W�X�^�̐ݒ�
AD1CON3bits.ADRC = 0; //AD�ϊ��N���b�N���I��//0�F�@PBCLK�iPeripheral Bus Clock)�@�i�Q�l�j1�F�@A/D����RC�N���b�N
AD1CON3bits.SAMC4 = 1; //AD1CON3bits.SAMC4 - AD1CON3bits.SAMC0(SAMC<4:0>)��5�r�b�g�ŃZ�b�g
AD1CON3bits.SAMC3 = 1; //�A�N�C�W�V�����^�C���iTad�i�N���b�N�����j�~N�j�ݒ�i�z�[���h�L���p�V�^�[�d���v���ԁj
AD1CON3bits.SAMC2 = 1; //1111�F 31Tad
AD1CON3bits.SAMC1 = 1; //�i�Q�l�j0001�F 1Tad �@0010�F 2Tad �@�@�@0011�F 3Tad�@�@�E�E�E�E
AD1CON3bits.SAMC0 = 1; //
AD1CON3bits.ADCS7 = 0; //AD�ϊ����Ԃ̐ݒ�/AD1CON3bits.ADCS7 -�@AD1CON3bits.ADCS0�iADCS��7�F0���j��8�r�b�g�ŃZ�b�g
//AD�ϊ������t���OAD1CON1bits.DONE�ɂ��AAD�ϊ����������m����ꍇ�͐ݒ�s�v
AD1CON3bits.ADCS6 = 0; //AD�ϊ������܂ł̂̃N���b�N���I���r�b�g
AD1CON3bits.ADCS5 = 0; //0000 0101�F�@1Tad = 6Tpb �iTpb�F�@PBCLK�̎����j
AD1CON3bits.ADCS4 = 0; //�i�Q�l�j 0000 0000�F�@1Tad�@=�@2Tpb
AD1CON3bits.ADCS3 = 0; // 0000 0001�F�@1Tad = 3Tpb
AD1CON3bits.ADCS2 = 1; // 0000 0010�F�@1Tad�@=�@4Tpb
AD1CON3bits.ADCS1 = 0; // �@�@�E�E�E�E�@�@�@�@
AD1CON3bits.ADCS0 = 1; //�@�@�@�@�@1111 1111�F 1Tad = 512Tpb
//AD1CHS���W�X�^�̐ݒ�@//SHA�́{�[�q�Ɓ[�[�q�ւ̐ڑ��i�|�[�g�j�ݒ�
AD1CHSbits.CH0NB = 0; //�}���`�v���N�TMUXB�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SB3 = 0; //AD1CHSbits.CH0SB3 - AD1CHSBbits.CH0SB0�i��CH0SB��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SB2 = 0; //�}���`�v���N�TMUXB�̐������͑I��
AD1CHSbits.CH0SB1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SB0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
AD1CHSbits.CH0NA = 0; //�}���`�v���N�TMUXA�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SA3 = 0; //AD1CHSbits.CH0SA3 - AD1CHSbits.CH0SA0�i��CH0SA��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SA2 = 0; //�}���`�v���N�TMUXA�̐������͑I��
AD1CHSbits.CH0SA1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SA0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
//AD1PCFG���W�X�^�̐ݒ�@//�@�|�[�g�̃A�i���Oor�f�W�^���ݒ�@
//���f�o�C�X���Z�b�g�ł͑S�r�b�g0�ƂȂ邽�߃f�t�H���g�ł̓A�i���O���͂ƂȂ�̂Ńf�W�^���Ŏg�����d�s���́A�R���t�B�O���[�V�����Ńf�W�^���ݒ肪�K�v!!�@
AD1PCFGbits.PCFG15 = 1;//RB15/AN15�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG14 = 1;//RB14/AN14�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG13 = 1;//RB13/AN13�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG12 = 1;//RB12/AN12�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG11 = 1;//RB11/AN11�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG10 = 1;//RB10/AN10�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG9 = 1;//RB9/AN9�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG8 = 0;//RB8/AN8�A�i���O����or�f�W�^�����͑I���F�@�A�i���O�@//��AN8���特������͂���
AD1PCFGbits.PCFG7 = 1;//RB7/AN7�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG6 = 1;//RB6/AN6�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG5 = 1;//RB5/AN5�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG4 = 1;//RB4/AN4�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG3 = 1;//RB3/AN3�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG2 = 1;//RB2/AN2�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG1 = 1;//RB1/AN1�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
AD1PCFGbits.PCFG0 = 1;//RB0/AN0�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@
//AD1CSSL���W�X�^�̐ݒ� //�ǂݍ��ރ`�����l���i���͒[�q�j���Z�b�g����
AD1CSSLbits.CSSL15 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL14 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL13 = 0; //AN13��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL12 = 0; //AN12��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL11 = 0; //AN11��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL10 = 0; //AN10��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL9 = 0; //AN9��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL8 = 1; //AN8��MUXA�ŃX�L��������@ //���g�p����AN8�̃`�����l�������ǂݍ���
AD1CSSLbits.CSSL7 = 0; //AN7��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL6 = 0; //AN6��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL5 = 0; //AN5��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL4 = 0; //AN4��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL3 = 0; //AN3��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL2 = 0; //AN2��MUXA�ŃX�L�������Ȃ��@
AD1CSSLbits.CSSL1 = 0; //AN1��MUXA�ŃX�L�������Ȃ��@�@
AD1CSSLbits.CSSL0 = 0; //AN0��MUXA�ŃX�L�������Ȃ��@�@�@�@�@
//�L�����N�^�t���|�[�g���o�͐ݒ� //��������
TRISBbits.TRISB15 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB14 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB13 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB12 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA9 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA10 = 0; //�L�����N�^�t���|�[�g�ݒ�
/// �C���^�[�o���^�C�}�P�@�����@45.3��sec�@�i���f�[�^�T���v�����O�����j
OpenTimer1(
T1_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T1_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T1_PS_1_1, //�v���X�P�[���@1/256�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
3624 //PRx�l�F�@�@T0[��sec] = 1000x1000/80000000x3624 = 1/80x3624 = 45.3��sec
);
//��ԕω����W���[���i�X�C�b�`���o�j�����ݒ�
mCNOpen(
CN_ON, //��ԕω����W���[���@ON
CN2_ENABLE | //CN2 Enable //RB0
CN3_ENABLE , //CN3 Enable //RB1
// CN5_ENABLE, //CN5 Enable //RB3
CN2_PULLUP_ENABLE | //CN2 �v���A�b�v��R�ݒ�
CN3_PULLUP_ENABLE //CN3 �v���A�b�v��R�ݒ�
// CN5_PULLUP_ENABLE //CN5 �v���A�b�v��R�ݒ�
);
ConfigIntCN(CHANGE_INT_ON | CHANGE_INT_PRI_2); //��ԕω����荞��ON�A�D��x2
//SD�J�[�h�W�iSPI4��)�|�[�g�ݒ� -->�@HardwareProfile.h
//VS1011e�W�i��SPI3)�|�[�g�ݒ� --> VS1011.h,VS1011.c
//INT035TFT�W�|�[�g�ݒ� --> HardwareProfile.h
//�@VS1011e�̏������@
VS1011_Init();
Volume = 0x08; // ���ʂ̏����ݒ�
SetVolume(Volume, Volume);
BASS = 0; // �o�X�u�[�X�g�̏����ݒ�
SetBassBoost(BASS,15);
// VS1011�̃f�o�b�O���e�X�g�p�̃R�}���h�@�@
// VS1011_SineTest();
// �����g�o�̓e�X�g
// �J�[�h�̎����m�F�ƃf�B���N�g���ǂݍ��� �i�i�v�҂��j
while(!FSInit());
result = FindFirst("*.*", ATTR_ARCHIVE, rptr); //�ŏ��̃t�@�C���̃T�[�`�i���[�g������MP3�t�@�C�������邱�Ƃ��O��j
if(result == 0)
{
pfile = FSfopen(Record.filename, "r"); // �t�@�C���̃I�[�v��
str_filename = Record.filename;
}
Mode = 0;
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"Record 6 Player");
lcd_str(Buf); //�t���\��
delay_ms(1000);
TRISDbits.TRISD2 = 0;
TRISDbits.TRISD3 = 0;
TRISGbits.TRISG15 = 0;
LATGbits.LATG15 = 0;
LATDbits.LATD3 = 0;
LATDbits.LATD2 = 0;
LATDbits.LATD2 = 1;
LATDbits.LATD3 = 1;
LATGbits.LATG15 = 1;
while(1)
{
if(Mode == 0)play(); //�����[�h
else SD_write(); //�^�����[�h
}
return 0;
}
//----------------------------------------------------------------------------------------------------------
//HardwareProfile.h
//Microchip Memory Disk Drive File System
#ifndef _HARDWAREPROFILE_H_
#define _HARDWAREPROFILE_H_
//�N���b�N���g���ݒ� �V�X�e���N���b�N�F80MHZ
#define GetSystemClock() (80000000ul) //�V�X�e���N���b�N
#define GetPeripheralClock() (GetSystemClock()/2) //�y���t�F�����N���b�N
#define GetInstructionClock() (GetSystemClock()) //�C���X�g���N�V�����N���b�N
// Clock values
// #define MILLISECONDS_PER_TICK 10 // Definition for use with a tick timer
// #define TIMER_PRESCALER TIMER_PRESCALER_8 // Definition for use with a tick timer
// #define TIMER_PERIOD 37500 // Definition for use with a tick timer
// Description: Macro used to enable the SD-SPI physical layer (SD-SPI.c and .h)
#define USE_SD_INTERFACE_WITH_SPI
//SD �J�[�h�I���E���o
//CS�F�`�b�v�Z���N�g // Description: SD-SPI Chip Select Output bit
#define SD_CS LATDbits.LATD14
#define SD_CS_TRIS TRISDbits.TRISD14
//CD�F�J�[�h�f�B�e�N�g�@// Description: SD-SPI Card Detect Input bit
#define SD_CD PORTFbits.RF12
#define SD_CD_TRIS TRISFbits.TRISF12
//WE�F���C�g�C�l�[�u�� Description: SD-SPI Write Protect Check Input bit
#define SD_WE PORTAbits.RA1
#define SD_WE_TRIS TRISAbits.TRISA1
//SPI�R���t�B�M�����[�V���� //SPI Configuration
#define SPI_START_CFG_1 (PRI_PRESCAL_64_1 | SEC_PRESCAL_8_1 | MASTER_ENABLE_ON | SPI_CKE_ON | SPI_SMP_ON)
#define SPI_START_CFG_2 (SPI_ENABLE)
#define SPI_FREQUENCY (4000000) //SPI���g�� //Define the SPI frequency
// #define SPI_FREQUENCY (20000000) //SPI���g�� //Define the SPI frequency
//�`�����l��4�F
#define SPICON1 SPI4CON //���䃌�W�X�^
#define SPISTAT SPI4STAT //SPI�X�e�[�^�X���W�X�^ status register
#define SPIBUF SPI4BUF //SPI�o�b�t�@���W�X�^
#define SPISTAT_RBF SPI4STATbits.SPIRBF //��M�o�b�t�@���t�r�b�g// The receive buffer full bit in the SPI status register
#define SPICON1bits SPI4CONbits //�r�b�g�P�ʂ̒�`�i���䃌�W�X�^�jThe bitwise define for the SPI control register (i.e. _____bits)
#define SPISTATbits SPI4STATbits //�r�b�g�P�ʂ̒�`�i�X�e�[�^�X���W�X�^�j //The bitwise define for the SPI status register (i.e. _____bits)
#define SPIENABLE SPI4CONbits.ON //SPI���W���[���@�C�l�[�u���r�b�g //The enable bit for the SPI module
#define SPIBRG SPI4BRG //�{�[���[�g�W�F�l���[�^//The definition for the SPI baud rate generator register (PIC32)
//SCK,SDI,SDO�s���A�T�C�� //Tris pins for SCK/SDI/SDO lines
#define SPICLOCK TRISFbits.TRISF12 //TRISGbits.TRISG6 //SCK
#define SPIIN TRISFbits.TRISF4 //PIC��SDI4 // TRISGbits.TRISG7 //PIC��SDI2
#define SPIOUT TRISFbits.TRISF5 //PIC��SDO4 // TRISGbits.TRISG8 //SDO
//SPI���C�u������ //library functions
// #define putcSPI putcSPI4 //putcSPI2
// #define getcSPI getcSPI4 //getcSPI2
// #define OpenSPI(config1, config2) OpenSPI4(config1, config2) //OpenSPI2(config1, config2)
// #include <uart2.h>
#endif
//-------------------------------------------------------------------------------------------------------------------------------------
/*********************************************************************
* VS1011E�p�w�b�_�t�@�C��
*
********************************************************************/
//���̃t�@�C���́@��ՓN�炳��PIC24FJ64GA002�p�ɐv���ꂽ�t�@�C����
//PIC32MX795F512L�p�ɕύX�������̂ł��B
#include "GenericTypeDefs.h"
//Delay���p�N���b�N���g����`�@
//#define CLOCK 16 // MHz
// �|�[�g�̒�`
#define MP3_DREQ_TRIS (TRISAbits.TRISA15) //(TRISBbits.TRISB14) // Data Request
#define MP3_DREQ_IO (PORTAbits.RA15) //(PORTBbits.RB14)
#define MP3_XRESET_TRIS (TRISDbits.TRISD11) //(TRISAbits.TRISA0) // Reset, active low
#define MP3_XRESET_IO (LATDbits.LATD11) //(LATAbits.LATA0)
#define MP3_XDCS_TRIS (TRISAbits.TRISA5) //(TRISBbits.TRISB15) // Data Chip Select
#define MP3_XDCS_IO (LATAbits.LATA5) //(LATBbits.LATB15)
#define MP3_XCS_TRIS (TRISAbits.TRISA14) //(TRISBbits.TRISB13) // Control Chip Select
#define MP3_XCS_IO (LATAbits.LATA14) //(LATBbits.LATB13)
//SPI3���g�p // SPI��SPI2���g�p�@
#define MP3_SCK_TRIS (TRISDbits.TRISD15) //SDK3/RD15 (TRISBbits.TRISB12) //VS1011e
#define MP3_SDI_TRIS (TRISFbits.TRISF2) //SDI3/RF2 (TRISBbits.TRISB10)
#define MP3_SDO_TRIS (TRISFbits.TRISF8) //SDO3/RF8 (TRISBbits.TRISB11)
#define MP3_SPI_IF (IFS0bits.SPI3RXIF) //RX�����݊����t���O //(IFS2bits.SPI2IF)/Flag Status bit 1:interrupt occured 0:interrupt not occured
#define MP3_SSPBUF (SPI3BUF) // (SPI2BUF)
#define MP3_SPICON1 (SPI3CON) // (SPI2CON1)
//#define MP3_SPICON1bits (SPI3CONbits) //(SPI2CON1bits)
//#define MP3_SPICON2 (SPI3CON) //SPI2CON2
//#define MP3_SPISTAT (SPI3STAT) //(SPI2STAT)
//#define MP3_SPISTATbits (SPI3STATbits) //(SPI2STATbits)
/* ���v���g�^�C�s���O�@*/
BYTE WriteSPI(BYTE output);
void Command(BYTE RegAdrs, BYTE UpData, BYTE LowData);
void SendData(BYTE Data);
//void delay_ms(int msec);
void VS1011_Init(void);
void VS1011_SineTest(void);
void SetVolume(BYTE right, BYTE left);
void SetBassBoost(BYTE bass, BYTE gfreq);
void PlayEnd(void);
//------------------------------------------------------------------------------------------------------------------------
//
/*****************************************************
*�@�@VS1011E�@���䃉�C�u����
*
******************************************************/
//���̃t�@�C���́@��ՓN�炳��PIC24FJ64GA002�p�ɐv���ꂽ�t�@�C����
//PIC32MX795F512L�p�ɕύX�������̂ł��B
#include "VS1011.h"
#include <p32xxxx.h>
//#include <p24FJ64GA002.h>
/************************************
* SPI Read after Write�@��{��
************************************/
BYTE WriteSPI(BYTE output){
MP3_SPI_IF = 0; //��M�����t���O�N���A // ���荞�݃t���O�N���A
MP3_SSPBUF = output; // SPI�o��
while(!MP3_SPI_IF); //��M���������݃t���O�҂� // ���͑҂�
return MP3_SSPBUF; // // ���̓f�[�^�߂�l
}
/************************************
* VS1011�p�R�}���h�o�͊�
************************************/
void Command(BYTE RegAdrs, BYTE UpData, BYTE LowData){
MP3_XDCS_IO = 1; // �f�[�^���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �R�}���h���[�h�ݒ�
WriteSPI(0x02); // �������ݓ���w��
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�o��
WriteSPI(UpData); // ��ʃo�C�g�o��
WriteSPI(LowData); // ���ʃo�C�g�o��
MP3_XCS_IO = 1; // �R�}���h���[�h����
}
/************************************
* VS1011�p�R�}���h�o�͊�(�m�F�t��)
************************************/
void CmdCheck(BYTE RegAdrs, BYTE UpData, BYTE LowData){
BYTE b1,b2;
do{
MP3_XDCS_IO = 1; // �f�[�^���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �R�}���h���[�h�ݒ�
WriteSPI(0x02); // �������ݓ���w��
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�o��
WriteSPI(UpData); // ��ʃo�C�g�o��
WriteSPI(LowData); // ���ʃo�C�g�o��
MP3_XCS_IO = 1; // �R�}���h���[�h����
while(!MP3_DREQ_IO); // ���f�B�[�҂�
MP3_XCS_IO = 0; // �ǂݍ��݊m�F
WriteSPI(0x03); // �ǂݍ��ݓ���
WriteSPI(RegAdrs); // ���W�X�^�A�h���X�w��
b1 = WriteSPI(0xFF); // return UpData
b2 = WriteSPI(0xFF); // return LowData
MP3_XCS_IO = 1;
}while((b1 != UpData) || (b2 != LowData));
}
/************************************
* VS1011�p�f�[�^�o�͊�
************************************/
void SendData(BYTE Data){
while(!MP3_DREQ_IO); // ���f�B�[�҂�
WriteSPI(Data);
}
/***********************************************
* ���ʃ��x���ݒ��
* vRight = �E�`���l���p����
* vLeft = ���`���l���p����
*�@�@ ��������@0x00=Max 0dB 0.5dB�X�e�b�v�ʼn�����
************************************************/
void SetVolume(BYTE vRight, BYTE vLeft){
Command(0x0B, vRight, vLeft);
}
/**********************************************
* �ቹ�u�[�X�g�ݒ萧���
* bass�F �ቹ�Q�C���@�����W��0dB����15dB�͈̔�
* gfreq: �ቹ�u�[�X�g���g���ݒ�@10Hz�X�e�b�v�@0?15�͈̔�
***********************************************/
void SetBassBoost(BYTE bass, BYTE gfreq)
{
BYTE temp1 = 0;
/* �ݒ�͈͂̐��� */
if(bass > 15)
bass = 15;
if(gfreq > 15)
gfreq = 15;
/* 8�r�b�g�ɍ��� */
temp1 = gfreq;
temp1 |= (bass << 4);
Command(0x02, 0xFF, temp1); // BASS
return;
}
/*********************************************
* ���I��������
*
*********************************************/
void PlayEnd(void){
int i;
/* �Đ��o�b�t�@�N���A�̂���2048�o�C�g���M�@*/
MP3_XDCS_IO = 0; // XDCS�I��
for(i=0; i<2048; i++)
SendData(0); // 0�̃f�[�^�A�����M
MP3_XDCS_IO = 1; // XDCS�I�t
/*** �\�t�g�E�F�A���Z�b�g�Ŋ��� **/
Command(0x00, 0x08, 0x24); // SM_RESET���M
while(!MP3_DREQ_IO); // �R�}���h�����҂�
}
/********************************************
* VS1011 ��������
* VS1011�]�����[�h�ASDI�e�X�g���[�h�@�ɐݒ�
* VS1011�Ɛ���ɒʐM�ł��Ȃ��Ɖi�v�҂��ƂȂ�
*********************************************/
void VS1011_Init(void){
unsigned int val;
// VS1011�p�|�[�g�̏����ݒ�
MP3_XDCS_IO = 1; // DCS��High
MP3_XCS_IO = 1; // XCS��High
MP3_XRESET_IO = 0; // XRESET��Low
MP3_XRESET_TRIS = 0; // �o��TRIS�L����
MP3_DREQ_TRIS = 1; // DREQ���̓��[�h��
MP3_XDCS_TRIS = 0; // XDCS�o��/////////
MP3_XCS_TRIS = 0; // XCS�o��
MP3_SDI_TRIS = 1; // SDI2���̓��[�h
MP3_SDO_TRIS = 0; // SDO2�o�̓��[�h
MP3_SCK_TRIS = 0; // SCK2�o�̓��[�h
MP3_SPICON1 = 0x8120; // 8�r�b�g���[�h,CKP = 0,CLK=Fosc/4 (4MHz)
// �����ŃT���v��(SMP=0) �����G�b�W�ő��M(CKE=1)
// �t���[�����[�h�Ȃ�
SPI3BRG = 0x000F; // ��2.5Mbps
MP3_SPI_IF = 0; // ���荞�݃t���O�N���A
// RESET�����AVS1011�X�^�[�g
delay_ms(50); // 50msec delay
MP3_XRESET_IO = 1; // RESET����
// ���[�h�ݒ�@
CmdCheck(0x00, 0x08, 0x20); // ���[�h�����ݒ�@�V���[�h�ASDI�e�X�g���[�h
// �N���b�N�_�u���ݒ�@
val = 12288 / 2 + 0x8000; // �ݒ�l�����߂�i�f�[�^�V�[�g���j
CmdCheck(0x03, (BYTE)(val /256), (BYTE)val);
delay_ms(10);
}
/********************************************
* VS1011 �����g�e�X�g���[�h�ݒ��
* MODE��SPI�e�X�g���[�h�ɐݒ肵�Ă����K�v������
*********************************************/
void VS1011_SineTest(void)
{
/* �e�X�g���[�h�V�[�P���X�o�� */
while(!MP3_DREQ_IO);
MP3_XDCS_IO = 0;
// Start Sine Test
WriteSPI(0x53);
WriteSPI(0xEF);
WriteSPI(0x6E);
WriteSPI(0x7D); // 22.050kHz Out is 5kHz
WriteSPI(0x00);
WriteSPI(0x00);
WriteSPI(0x00);
WriteSPI(0x00);
MP3_XDCS_IO = 1;
}
/*
//usec�P�ʃf�B���C��
void delay_us(int usec){
usec = (int)(CLOCK*usec)/ 10;
while(usec) {
asm("NOP");
asm("NOP");
asm("NOP");
asm("NOP");
asm("NOP");
usec--;
}
}
//msec�P�ʃf�B���C��
void delay_ms(int msec){
int i;
for(i=0; i< msec; i++)
delay_us(1000);
}
*/
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
//#include <proc/p32mx795f512l.h> //MX795�̓C�j�V�����C�Y���[�v�����Ȃ�
//#include <proc/p32mx360f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATAbits.LATA9 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATAbits.LATA10 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do
{
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
//���̑��@FAT�֘A�̃C���N���[�t�@�C���͉��L�ɂ���܂��B
//�}�C�N���`�b�v�̃��C�u�����_�E�����[�h�y�[�W�F�@Microchip Libraries for Applications�@�@�����������o�[�W�����́@\microchip_solutions_v2013-02-15�@�ł��B
�����쌋�ʁ�
�@�@�@�@�E�@PIC32MX795F512L�ō쐬���������ł��B�@PC�ŕ����Ă݂Ă��������B �@VOICE.WAV
�@
�@�@�@�@�@